An Embodied Simulation Platform, Benchmark, and Data-Efficient Augmentation Framework for Wet-Lab Robotics
Pith reviewed 2026-06-27 06:42 UTC · model grok-4.3
The pith
Pipette's simulation augmentation raises SmolVLA success on wet-lab tasks from 44.1% to 74.7% using only 30 demonstrations per task.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Pipette supplies open wet-lab assets and an 11-task benchmark together with a simulation-based data augmentation pipeline that replays human demonstrations, perturbs lighting camera speed and actions, and filters episodes with automatic success checks, enabling data-efficient training in which SmolVLA success rises from 44.1 percent to 74.7 percent and pi0 success rises from 40.4 percent to 46.5 percent with only 30 demonstrations per task.
What carries the argument
The simulation-based data augmentation pipeline that replays demonstrations, applies lighting camera speed and action perturbations, and filters episodes via automatic task success checks to expand usable training data.
If this is right
- ACT reaches 65.5 percent average success rate across the 11 tasks with 30 demonstrations per task.
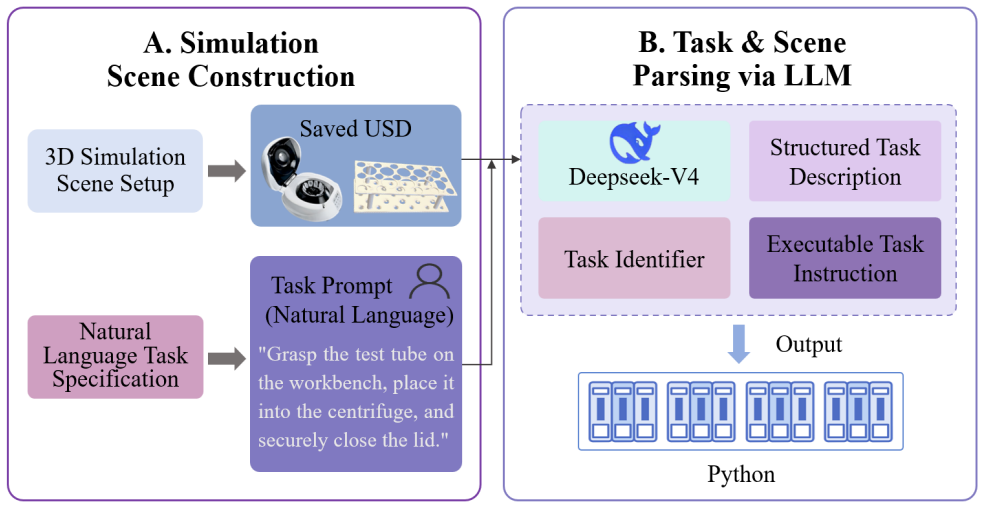
- The platform supports natural-language-driven scene construction and task registration for defining new wet-lab tasks.
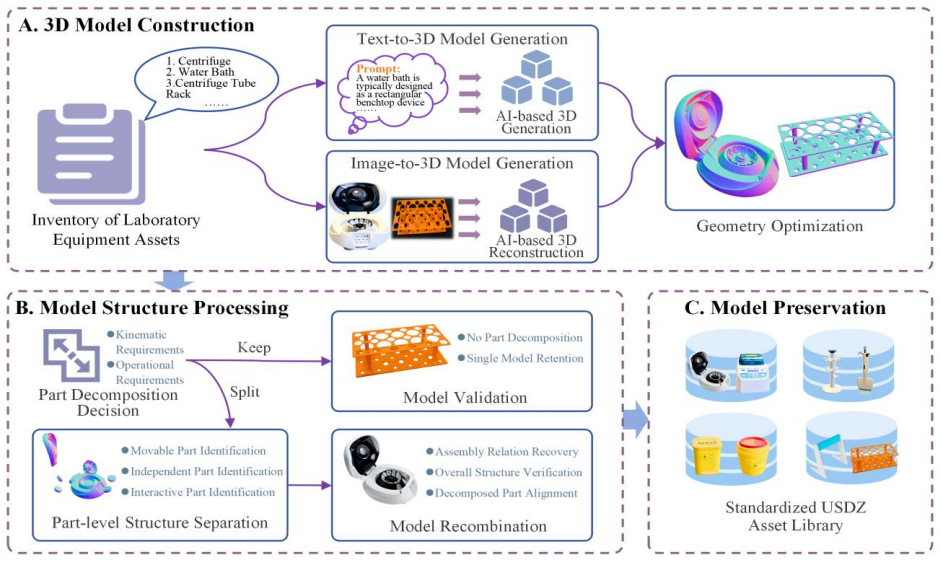
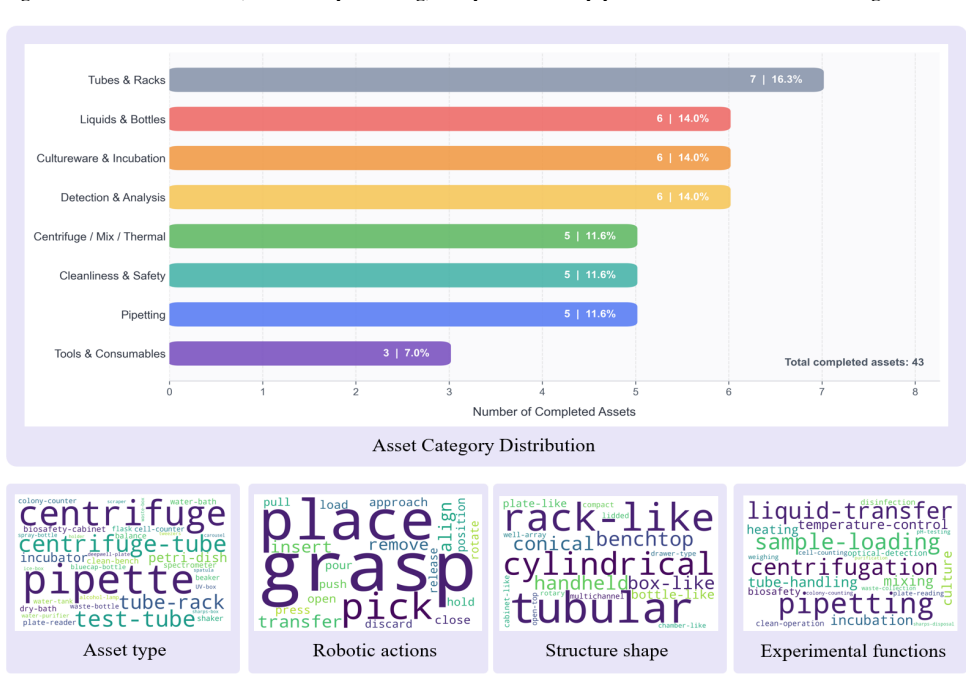
- Over 43 open-source and re-editable wet-lab assets are released along with an extensible asset-building pipeline.
- The augmentation approach improves data efficiency for vision-language-action models on sample handling, culture-ware manipulation, device operation, and precision placement tasks.
Where Pith is reading between the lines
- If the sim-to-real gap remains small this pipeline could reduce the number of costly or risky real-world trials required for training lab automation systems.
- Open editable assets may let non-expert users adapt the benchmark to specific biomedical protocols without building simulators from scratch.
- The same replay-and-perturb method might transfer to other precision-manipulation domains where demonstrations are scarce but physics can be simulated.
Load-bearing premise
The simulated physics, visuals, and contact dynamics are close enough to real wet-lab conditions that policies trained on the augmented data transfer to physical robots without large performance drops.
What would settle it
Deploy the policies trained with augmented data onto a physical wet-lab robot and measure whether task success rates remain near the reported simulation numbers or fall sharply.
Figures

read the original abstract
Wet-lab robots can improve the reproducibility, throughput, and safety of biomedical experiments, but scaling their learning requires customizable simulators for safe and reproducible task generation, open editable laboratory assets, and efficient pipelines that turn limited demonstrations into usable training data. We present Pipette, an embodied simulation platform, benchmark, and data-efficient augmentation framework for wet-lab robot learning. Pipette releases over 43 open-source and re-editable wet-lab assets, together with an extensible asset-building pipeline. A key component of Pipette is its simulation-based data augmentation pipeline, replaying human demonstrations in simulation, applies lighting, camera, speed, and action perturbations, and filters generated episodes with automatic task success checks, rapidly expanding usable training data from limited manual demonstrations. We further introduce an 11-task wet-lab embodied benchmark covering sample handling, culture-ware manipulation, device operation, and precision placement. With only 30 demonstrations per task, ACT achieves 65.5% average success rate, while simulation augmentation improves SmolVLA from 44.1% to 74.7% and {\pi}0 from 40.4% to 46.5%, validating the effectiveness of Pipette for data-efficient VLA training and evaluation. Pipette also supports natural-language-driven scene construction and task registration, lowering the barrier for non-expert users to define new wet-lab robotic tasks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Pipette, an embodied simulation platform for wet-lab robotics that includes over 43 open-source editable laboratory assets, an extensible asset-building pipeline, natural-language scene construction, and an 11-task benchmark spanning sample handling, culture-ware manipulation, device operation, and precision placement. It describes a simulation-based data augmentation pipeline that replays limited human demonstrations with perturbations to lighting, camera, speed, and actions, then filters episodes via automatic success checks. The central empirical claim is that, using only 30 demonstrations per task, this augmentation raises SmolVLA average success from 44.1% to 74.7% and π0 from 40.4% to 46.5% on the benchmark (with ACT reaching 65.5% without augmentation).
Significance. If the reported simulation results hold and the simulator fidelity supports transfer, the open release of re-editable wet-lab assets together with the perturbation-plus-filtering augmentation pipeline would constitute a practical contribution to data-efficient VLA training for biomedical robotics, lowering the barrier for non-expert task definition and enabling reproducible benchmark comparisons.
major comments (2)
- [Abstract] Abstract: the headline performance numbers (SmolVLA 44.1%→74.7%, π0 40.4%→46.5%) are obtained exclusively inside the Pipette simulator; no trial counts, standard deviations, or baseline implementation details are supplied, rendering the magnitude and reliability of the augmentation benefit impossible to assess.
- [Abstract] Abstract: although the work is positioned for wet-lab robotics and states that real-lab assets are released, the manuscript contains no physical-robot experiments that test whether policies trained on the augmented simulation data retain their reported gains under real contact dynamics, fluid behavior, lighting, or camera noise.
minor comments (1)
- [Abstract] Abstract: the token '{\pi}0' is a LaTeX rendering artifact and should be corrected to π0 (or π₀) for readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract and experimental scope. We address each major comment below, indicating planned revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract] Abstract: the headline performance numbers (SmolVLA 44.1%→74.7%, π0 40.4%→46.5%) are obtained exclusively inside the Pipette simulator; no trial counts, standard deviations, or baseline implementation details are supplied, rendering the magnitude and reliability of the augmentation benefit impossible to assess.
Authors: The evaluation protocol (100 trials per task/condition with reported standard deviations) and baseline implementation details appear in Section 5 and the supplementary material. We will revise the abstract to include the trial count and a brief reference to the evaluation setup, improving self-containment of the headline numbers without altering the reported results. revision: yes
-
Referee: [Abstract] Abstract: although the work is positioned for wet-lab robotics and states that real-lab assets are released, the manuscript contains no physical-robot experiments that test whether policies trained on the augmented simulation data retain their reported gains under real contact dynamics, fluid behavior, lighting, or camera noise.
Authors: The manuscript centers on the open simulation platform, benchmark, and perturbation-based augmentation pipeline, with all quantitative results obtained in simulation. Physical-robot validation of sim-to-real transfer lies outside the current scope and is noted as future work; we will expand the limitations discussion to explicitly address this point and clarify the intended role of the released assets. revision: partial
Circularity Check
No circularity: empirical benchmark results are self-contained
full rationale
The paper presents a new simulation platform (Pipette), an 11-task benchmark, and a data-augmentation pipeline. Its headline claims consist solely of measured success rates (e.g., ACT at 65.5 %, SmolVLA improved from 44.1 % to 74.7 % with augmentation) obtained by training and evaluating policies inside the described simulator. No equations, parameter-fitting steps, or self-citations are invoked that would reduce these reported percentages to quantities defined by the paper's own inputs. The evaluation is therefore an independent empirical measurement against the newly released benchmark assets rather than a tautological restatement of fitted values or prior self-referential results.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Automation in the Life Science Research Laboratory [J]
HOLLAND I, DA VIES J A. Automation in the Life Science Research Laboratory [J]. Front Bioeng Biotechnol, 2020, 8: 571777
2020
-
[2]
Can I benefit from laboratory automation? A decision aid for the successful introduction of laboratory automation [J]
RUPP N, RIES R, WIENBRUCH R, et al. Can I benefit from laboratory automation? A decision aid for the successful introduction of laboratory automation [J]. Anal Bioanal Chem, 2024, 416(1): 5–19
2024
-
[3]
Autonomous 'self-driving' laboratories: a review of technology and policy implications [J]
TOBIAS A V , WAHAB A. Autonomous 'self-driving' laboratories: a review of technology and policy implications [J]. R Soc Open Sci, 2025, 12(7): 250646
2025
-
[4]
AI, agentic models and lab automation for scientific discovery - the beginning of scAInce [J]
HARTUNG T. AI, agentic models and lab automation for scientific discovery - the beginning of scAInce [J]. Front Artif Intell, 2025, 8: 1649155
2025
-
[5]
RT-1: Robotics Transformer for Real-World Control at Scale
BROHAN A, BROWN N, CARBAJAL J, et al. RT-1: Robotics Transformer for Real-World Control at Scale [J]. ArXiv, 2022, abs/2212.06817
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[6]
RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
BROHAN A, BROWN N, CARBAJAL J, et al. RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control [J]. ArXiv, 2023, abs/2307.15818
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[7]
Open X- Embodiment: Robotic Learning Datasets and RT-X Models : Open X-Embodiment Collaboration0 [J]
PADALKAR A, POOLEY A, JAIN A, et al. Open X- Embodiment: Robotic Learning Datasets and RT-X Models : Open X-Embodiment Collaboration0 [J]. 2024 IEEE International Conference on Robotics and Automation (ICRA), 2023: 6892–903
2024
-
[8]
DU Z, WANG Z, FEI H, et al. BioProVLA-Agent: An Affordable, Protocol-Driven, Vision-Enhanced VLA- Enabled Embodied Multi-Agent System with Closed- Loop-Capable Reasoning for Biological Laboratory Manipulation, F, 2026 [C]
2026
-
[9]
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
KHAZATSKY A, PERTSCH K, NAIR S, et al. DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset [J]. ArXiv, 2024, abs/2403.12945
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[10]
RLBench: The Robot Learning Benchmark & Learning Environment [J]
JAMES S, MA Z, ARROJO D R, et al. RLBench: The Robot Learning Benchmark & Learning Environment [J]. IEEE Robotics and Automation Letters, 2019, 5: 3019–26
2019
-
[11]
LIBERO: Benchmarking Knowledge Transfer for Lifelong Robot Learning
LIU B, ZHU Y , GAO C, et al. LIBERO: Benchmarking Knowledge Transfer for Lifelong Robot Learning [J]. ArXiv, 2023, abs/2306.03310
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[12]
MimicGen: A Data Generation System for Scalable Robot Learning using Human Demonstrations
MANDLEKAR A, NASIRIANY S, WEN B, et al. MimicGen: A Data Generation System for Scalable Robot Learning using Human Demonstrations [J]. ArXiv, 2023, abs/2310.17596
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[13]
RoboCasa: Large-Scale Simulation of Everyday Tasks for Generalist Robots
NASIRIANY S, MADDUKURI A, ZHANG L, et al. RoboCasa: Large-Scale Simulation of Everyday Tasks for Generalist Robots [J]. ArXiv, 2024, abs/2406.02523
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[14]
Physical Laboratory Automation in Synthetic Biology [J]
STEPHENSON A, LASTRA L, NGUYEN B, et al. Physical Laboratory Automation in Synthetic Biology [J]. ACS Synth Biol, 2023, 12(11): 3156–69
2023
-
[15]
The Laboratory Automation Protocol (LAP) Format and Repository: A Platform for Enhancing Workflow Efficiency in Synthetic Biology [J]
ANHEL A M, ALEJALDRE L, GOñI-MORENO Á. The Laboratory Automation Protocol (LAP) Format and Repository: A Platform for Enhancing Workflow Efficiency in Synthetic Biology [J]. ACS Synth Biol, 2023, 12(12): 3514–20
2023
-
[16]
ProtoCode: Leveraging large language models (LLMs) for automated generation of machine-readable PCR protocols from scientific publications [J]
JIANG S, EV ANS-YAMAMOTO D, BERSENEV D, et al. ProtoCode: Leveraging large language models (LLMs) for automated generation of machine-readable PCR protocols from scientific publications [J]. SLAS Technol, 2024, 29(3): 100134
2024
-
[17]
Self-driving laboratories to autonomously navigate the protein fitness landscape [J]
RAPP J T, BREMER B J, ROMERO P A. Self-driving laboratories to autonomously navigate the protein fitness landscape [J]. Nat Chem Eng, 2024, 1(1): 97–107
2024
-
[18]
Development of the autonomous lab system to support biotechnology research [J]
FUSHIMI K, NAKAI Y , NISHI A, et al. Development of the autonomous lab system to support biotechnology research [J]. Sci Rep, 2025, 15(1): 6648
2025
-
[19]
Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware
ZHAO T, KUMAR V , LEVINE S, et al. Learning Fine- Grained Bimanual Manipulation with Low-Cost Hardware [J]. ArXiv, 2023, abs/2304.13705
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[20]
OpenVLA: An Open-Source Vision-Language-Action Model
KIM M J, PERTSCH K, KARAMCHETI S, et al. OpenVLA: An Open-Source Vision-Language-Action Model [J]. ArXiv, 2024, abs/2406.09246
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[21]
$\pi_0$: A Vision-Language-Action Flow Model for General Robot Control
BLACK K, BROWN N, DRIESS D, et al. π0: A Vision-Language-Action Flow Model for General Robot Control [J]. ArXiv, 2024, abs/2410.24164
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[22]
$\pi_{0.5}$: a Vision-Language-Action Model with Open-World Generalization
INTELLIGENCE P, BLACK K, BROWN N, et al. π 0.5: a Vision-Language-Action Model with Open-World Generalization [J]. ArXiv, 2025, abs/2504.16054
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[23]
SmolVLA: A Vision-Language-Action Model for Affordable and Efficient Robotics
SHUKOR M, AUBAKIROV A D, CAPUANO F, et al. SmolVLA: A Vision-Language-Action Model for Affordable and Efficient Robotics [J]. ArXiv, 2025, abs/2506.01844
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[24]
Meta-World: A Benchmark and Evaluation for Multi-Task and Meta Reinforcement Learning; proceedings of the Conference on Robot Learning, F, 2019 [C]
YU T, QUILLEN D, HE Z, et al. Meta-World: A Benchmark and Evaluation for Multi-Task and Meta Reinforcement Learning; proceedings of the Conference on Robot Learning, F, 2019 [C]
2019
-
[25]
robosuite: A Modular Simulation Framework and Benchmark for Robot Learning
ZHU Y , WONG J, MANDLEKAR A, et al. robosuite: A Modular Simulation Framework and Benchmark for Robot Learning [J]. ArXiv, 2020, abs/2009.12293
work page internal anchor Pith review Pith/arXiv arXiv 2020
-
[26]
Factory: Fast Contact for Robotic Assembly [J]
NARANG Y S, STOREY K, AKINOLA I, et al. Factory: Fast Contact for Robotic Assembly [J]. ArXiv, 2022, abs/2205.03532
-
[27]
GU J, XIANG F, LI X, et al. ManiSkill2: A Unified Benchmark for Generalizable Manipulation Skills [J]. ArXiv, 2023, abs/2302.04659
-
[28]
Chemistry3D: Robotic Interaction Benchmark for Chemistry Experiments [J]
LI S, HUANG Y , GUO C, et al. Chemistry3D: Robotic Interaction Benchmark for Chemistry Experiments [J]. ArXiv, 2024, abs/2406.08160
-
[29]
CHEN T, CHEN Z, CHEN B, et al. RoboTwin 2.0: A Scalable Data Generator and Benchmark with Strong Domain Randomization for Robust Bimanual Robotic Manipulation [J]. ArXiv, 2025, abs/2506.18088
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[30]
AutoBio: A Simulation and Benchmark for Robotic Automation in Digital Biology Laboratory [J]
LAN Z, JIANG Y , WANG R, et al. AutoBio: A Simulation and Benchmark for Robotic Automation in Digital Biology Laboratory [J]. ArXiv, 2025, abs/2505.14030
-
[31]
CADèNE R, ALIBERTS S, CAPUANO F, et al. LeRobot: An Open-Source Library for End-to-End Robot Learning [J]. ArXiv, 2026, abs/2602.22818. Appendix A More Information about the Pipette Platform A.1 Introduction to USD Asset Structures USD (Universal Scene Description) assets are an open 3D scene and asset description format proposed by Pixar, commonly used t...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.