Mana: Dexterous Manipulation of Articulated Tools
Pith reviewed 2026-06-27 06:16 UTC · model grok-4.3
The pith
Mana reinterprets articulated tool manipulation as an animation problem to achieve zero-shot sim-to-real transfer for grasping and in-hand use.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
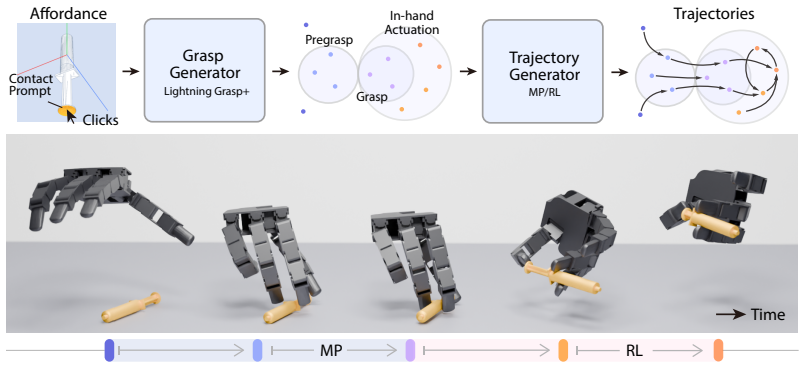
Mana reinterprets dexterous manipulation of articulated tools as an animation problem. It employs a coarse-to-fine pipeline that transforms procedurally-generated grasp keyframes into manipulation trajectories through motion planning and reinforcement learning. The data generation process is largely automatic, requiring only a few mouse clicks to specify functional affordances. This enables zero-shot sim-to-real transfer for grasping and in-hand manipulation on four articulated tools with different scales and joint types.
What carries the argument
The coarse-to-fine pipeline that transforms procedurally-generated grasp keyframes into manipulation trajectories through motion planning and reinforcement learning.
If this is right
- Grasping and manipulation policies generalize across tools that vary in scale and joint type without per-tool retraining.
- Functional affordance specification reduces to a few mouse clicks rather than detailed manual trajectory design.
- Zero-shot transfer removes the requirement for real-world adaptation steps after simulation training.
- Contact-rich in-hand manipulation becomes feasible for tools whose internal degrees of freedom must be coordinated during use.
- The same pipeline scales to additional articulated objects once their geometry and affordances are supplied.
Where Pith is reading between the lines
- The animation framing could reduce engineering effort for other contact-rich tasks such as assembly or tool switching on the same robot hand.
- If simulation fidelity holds, the method might allow rapid deployment across different robot platforms by swapping only the hand model.
- Extending the keyframe generation step to accept natural language descriptions of affordances would further lower the human input barrier.
- Testing whether the same coarse-to-fine structure works when the robot must also move its arm base during manipulation would clarify limits of the current scope.
Load-bearing premise
The simulation environment accurately captures the physics of contact-rich interactions and joint dynamics for the articulated tools.
What would settle it
Running the learned policy on a new articulated tool in the real world and checking whether contact forces, joint angles, and task success rates match simulation predictions without any real-world fine-tuning.
Figures



read the original abstract
Articulated tool manipulation remains a major challenge in dexterous robotics due to the need to coordinate internal degrees of freedom and contact-rich interactions. While prior work has largely focused on rigid objects, articulated tool use remains underexplored because of its physical complexity and the difficulty of learning functional grasping and manipulation policies. We present Mana (Manipulation Animator), a general sim-to-real framework that reinterprets dexterous manipulation as an animation problem. Inspired by computer animation, Mana employs a coarse-to-fine pipeline that transforms procedurally-generated grasp keyframes into manipulation trajectories through motion planning and reinforcement learning. The data generation process is largely automatic, requiring only a few mouse clicks to specify functional affordances (<1 minute per tool). Across four articulated tools spanning different scales and joint types, Mana achieves zero-shot sim-to-real transfer for both grasping and in-hand manipulation, demonstrating a scalable approach to dexterous articulated tool use.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Mana, a sim-to-real framework for dexterous manipulation of articulated tools that reinterprets the problem as an animation task. It employs a coarse-to-fine pipeline converting procedurally generated grasp keyframes into trajectories via motion planning and reinforcement learning, with data generation requiring minimal human input (a few mouse clicks per tool). The central claim is zero-shot sim-to-real transfer for both grasping and in-hand manipulation across four articulated tools differing in scale and joint type.
Significance. If substantiated, the result would be significant for robotics by demonstrating a scalable, largely automatic approach to functional manipulation of articulated objects that avoids extensive manual engineering or domain randomization. The animation-inspired pipeline and low-effort affordance specification are clear strengths that could generalize beyond the evaluated tools.
major comments (2)
- [Experiments / Results (likely §4–5)] The zero-shot sim-to-real claim is load-bearing for the entire contribution, yet the manuscript provides no description of the simulator, contact model (e.g., friction, compliance), joint dynamics parameters, or any system identification/validation against real hardware. Without this grounding, it is impossible to determine whether observed transfer stems from the method or from unstated parameter matching.
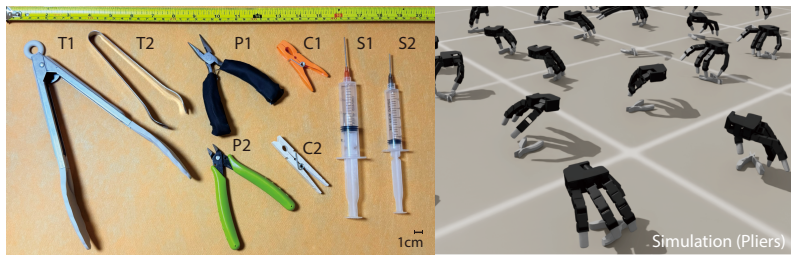
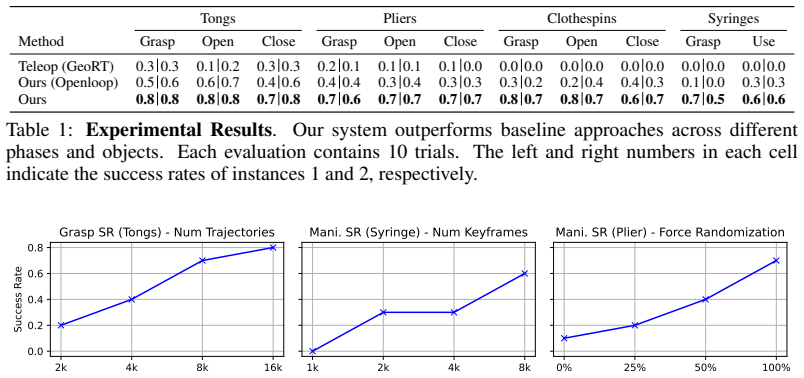
- [Experiments / Results (likely §4–5)] No quantitative metrics, baselines, success rates, or failure-case analysis are reported for the four tools, making it impossible to assess whether the pipeline actually outperforms prior rigid-object or articulated-tool methods or to evaluate robustness across joint types.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which highlight important areas for improving the clarity and substantiation of our sim-to-real claims. We will revise the manuscript to address both major points by adding the requested details and metrics.
read point-by-point responses
-
Referee: The zero-shot sim-to-real claim is load-bearing for the entire contribution, yet the manuscript provides no description of the simulator, contact model (e.g., friction, compliance), joint dynamics parameters, or any system identification/validation against real hardware. Without this grounding, it is impossible to determine whether observed transfer stems from the method or from unstated parameter matching.
Authors: We agree that the current manuscript lacks sufficient detail on the simulation environment to fully support the zero-shot transfer claims. In the revision, we will add a new subsection (likely in §4) describing the simulator (including the physics engine), contact models with specific friction and compliance parameters, joint dynamics, and any system identification or validation steps performed against real hardware to match parameters. revision: yes
-
Referee: No quantitative metrics, baselines, success rates, or failure-case analysis are reported for the four tools, making it impossible to assess whether the pipeline actually outperforms prior rigid-object or articulated-tool methods or to evaluate robustness across joint types.
Authors: We acknowledge this gap in the experimental reporting. The revised manuscript will include quantitative results such as success rates for grasping and in-hand manipulation across the four tools, comparisons to relevant baselines from prior work on rigid and articulated objects, and a failure-case analysis to assess robustness across scales and joint types. revision: yes
Circularity Check
No circularity: empirical sim-to-real claims rest on experimental transfer, not definitional reduction.
full rationale
The provided abstract and description outline a coarse-to-fine pipeline (motion planning + RL) for generating manipulation trajectories from procedural keyframes. No equations, fitted parameters renamed as predictions, self-citations as load-bearing premises, or uniqueness theorems appear. The zero-shot transfer result is presented as an experimental outcome across four tools rather than a quantity forced by construction from its own inputs. This matches the default expectation of a non-circular paper; the skeptic concern about simulator fidelity is an assumption-validity issue, not a circularity reduction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
O. M. Andrychowicz, B. Baker, M. Chociej, R. Jozefowicz, B. McGrew, J. Pachocki, A. Petron, M. Plappert, G. Powell, A. Ray, et al. Learning dexterous in-hand manipulation. The International Journal of Robotics Research, 39(1):3–20, 2020
2020
-
[2]
T. G. W. Lum, M. Matak, V . Makoviychuk, A. Handa, A. Allshire, T. Hermans, N. D. Ratliff, and K. Van Wyk. Dextrah-g: Pixels-to-action dexterous arm-hand grasping with geometric fabrics.arXiv preprint arXiv:2407.02274, 2024
arXiv 2024
-
[3]
Z.-H. Yin, C. Wang, L. Pineda, F. Hogan, K. Bodduluri, A. Sharma, P. Lancaster, I. Prasad, M. Kalakrishnan, J. Malik, et al. Dexteritygen: Foundation controller for unprecedented dex- terity. InRobotics: Science and Systems (RSS), 2025
2025
-
[4]
T. Lin, K. Sachdev, L. Fan, J. Malik, and Y . Zhu. Sim-to-real reinforcement learning for vision- based dexterous manipulation on humanoids. InConference on Robot Learning (CoRL), 2025
2025
-
[5]
Kedia, T
K. Kedia, T. G. W. Lum, J. Bohg, and C. K. Liu. Simtoolreal: An object-centric policy for zero-shot dexterous tool manipulation. InRobotics: Science and Systems (RSS), 2026
2026
-
[6]
Handa, K
A. Handa, K. Van Wyk, W. Yang, J. Liang, Y .-W. Chao, Q. Wan, S. Birchfield, N. Ratliff, and D. Fox. Dexpilot: Vision-based teleoperation of dexterous robotic hand-arm system. In International Conference on Robotics and Automation (ICRA), 2020
2020
-
[7]
Sivakumar, K
A. Sivakumar, K. Shaw, and D. Pathak. Robotic telekinesis: Learning a robotic hand imitator by watching humans on youtube. InRobotics: Science and Systems (RSS), 2022
2022
-
[8]
Cheng, J
X. Cheng, J. Li, S. Yang, G. Yang, and X. Wang. Open-television: Teleoperation with immer- sive active visual feedback. InConference on Robot Learning (CoRL), 2024
2024
-
[9]
R. Ding, Y . Qin, J. Zhu, C. Jia, S. Yang, R. Yang, X. Qi, and X. Wang. Bunny- visionpro: Real-time bimanual dexterous teleoperation for imitation learning.arXiv preprint arXiv:2407.03162, 2024. 9
arXiv 2024
-
[10]
Z.-H. Yin, C. Wang, L. Pineda, K. Bodduluri, T. Wu, P. Abbeel, and M. Mukadam. Geo- metric retargeting: A principled, ultrafast neural hand retargeting algorithm. InInternational Conference on Intelligent Robots and Systems (IROS), 2025
2025
-
[11]
Handa, A
A. Handa, A. Allshire, V . Makoviychuk, A. Petrenko, R. Singh, J. Liu, D. Makoviichuk, K. Van Wyk, A. Zhurkevich, B. Sundaralingam, et al. Dextreme: Transfer of agile in-hand manipulation from simulation to reality. InInternational Conference on Robotics and Automa- tion (ICRA), 2023
2023
-
[12]
Z.-H. Yin, B. Huang, Y . Qin, Q. Chen, and X. Wang. Rotating without seeing: Towards in-hand dexterity through touch. InRobotics: Science and Systems (RSS), 2023
2023
-
[13]
Y . Chen, C. Wang, L. Fei-Fei, and C. K. Liu. Sequential dexterity: Chaining dexterous policies for long-horizon manipulation. InConference on Robot Learning (CoRL), 2023
2023
-
[14]
C. K. Liu. Dextrous manipulation from a grasping pose. InACM SIGGRAPH 2009 papers, pages 1–6. 2009
2009
-
[15]
Qin, Y .-H
Y . Qin, Y .-H. Wu, S. Liu, H. Jiang, R. Yang, Y . Fu, and X. Wang. Dexmv: Imitation learning for dexterous manipulation from human videos. InEuropean Conference on Computer Vision, pages 570–587. Springer, 2022
2022
-
[16]
T. Pang, H. T. Suh, L. Yang, and R. Tedrake. Global planning for contact-rich manipulation via local smoothing of quasi-dynamic contact models.IEEE Transactions on robotics, 39(6): 4691–4711, 2023
2023
-
[17]
S. Chen, J. Bohg, and C. K. Liu. Springgrasp: Synthesizing compliant, dexterous grasps under shape uncertainty. InRobotics: Science and Systems (RSS), 2024
2024
-
[18]
L. Shao, F. Ferreira, M. Jorda, V . Nambiar, J. Luo, E. Solowjow, J. A. Ojea, O. Khatib, and J. Bohg. Unigrasp: Learning a unified model to grasp with multifingered robotic hands.IEEE Robotics and Automation Letters, 5(2):2286–2293, 2020
2020
-
[19]
R. Wang, J. Zhang, J. Chen, Y . Xu, P. Li, T. Liu, and H. Wang. Dexgraspnet: A large-scale robotic dexterous grasp dataset for general objects based on simulation. InInternational Con- ference on Robotics and Automation (ICRA), 2023
2023
-
[20]
Y . Qin, B. Huang, Z.-H. Yin, H. Su, and X. Wang. Dexpoint: Generalizable point cloud re- inforcement learning for sim-to-real dexterous manipulation. InConference on Robot Learn- ing (CoRL), 2022
2022
-
[21]
W. Wan, H. Geng, Y . Liu, Z. Shan, Y . Yang, L. Yi, and H. Wang. Unidexgrasp++: Improving dexterous grasping policy learning via geometry-aware curriculum and iterative generalist- specialist learning. InIEEE/CVF Conference on Computer Vision and Pattern Recogni- tion (CVPR), 2023
2023
-
[22]
Kannan, K
A. Kannan, K. Shaw, S. Bahl, P. Mannam, and D. Pathak. Deft: Dexterous fine-tuning for real-world hand policies. InConference on Robot Learning (CoRL), 2023
2023
- [23]
- [24]
-
[25]
J. Ye, K. Wang, C. Yuan, R. Yang, Y . Li, J. Zhu, Y . Qin, X. Zou, and X. Wang. Dex1b: Learning with 1b demonstrations for dexterous manipulation.Robotics: Science and Systems (RSS), 2025. 10
2025
-
[26]
J. Chen, Y . Ke, L. Peng, and H. Wang. Dexonomy: Synthesizing all dexterous grasp types in a grasp taxonomy. InRobotics: Science and Systems (RSS), 2025
2025
-
[27]
Röstel, D
L. Röstel, D. Winkelbauer, J. Pitz, L. Sievers, and B. Bäuml. Composing dextrous grasping and in-hand manipulation via scoring with a reinforcement learning critic. InInternational Conference on Robotics and Automation (ICRA), 2025
2025
-
[28]
H. Qi, B. Yi, S. Suresh, M. Lambeta, Y . Ma, R. Calandra, and J. Malik. General in-hand object rotation with vision and touch. InConference on Robot Learning (CoRL), 2023
2023
-
[29]
Khandate, S
G. Khandate, S. Shang, E. T. Chang, T. L. Saidi, Y . Liu, S. M. Dennis, J. Adams, and M. Cio- carlie. Sampling-based exploration for reinforcement learning of dexterous manipulation. In Robotics: Science and Systems (RSS), 2023
2023
-
[30]
M. Yang, C. Lu, A. Church, Y . Lin, C. Ford, H. Li, E. Psomopoulou, D. A. Barton, and N. F. Lepora. Anyrotate: Gravity-invariant in-hand object rotation with sim-to-real touch. In Conference on Robot Learning (CoRL), 2024
2024
-
[31]
Y . Yuan, H. Che, Y . Qin, B. Huang, Z.-H. Yin, K.-W. Lee, Y . Wu, S.-C. Lim, and X. Wang. Robot synesthesia: In-hand manipulation with visuotactile sensing. InInternational Confer- ence on Robotics and Automation (ICRA), 2024
2024
-
[32]
J. Wang, Y . Yuan, H. Che, H. Qi, Y . Ma, J. Malik, and X. Wang. Lessons from learning to spin" pens". InConference on Robot Learning (CoRL), 2024
2024
-
[33]
J. Yin, H. Qi, J. Malik, J. Pikul, M. Yim, and T. Hellebrekers. Learning in-hand translation using tactile skin with shear and normal force sensing. InInternational Conference on Robotics and Automation (ICRA), 2025
2025
-
[34]
Hsieh, W.-H
E. Hsieh, W.-H. Hsieh, Y .-J. Wang, T. Lin, J. Malik, K. Sreenath, and H. Qi. Learning dexterous manipulation skills from imperfect simulations. InInternational Conference on Robotics and Automation (ICRA), 2026
2026
-
[35]
I. Akkaya, M. Andrychowicz, M. Chociej, M. Litwin, B. McGrew, A. Petron, A. Paino, M. Plappert, G. Powell, R. Ribas, et al. Solving rubik’s cube with a robot hand.arXiv preprint arXiv:1910.07113, 2019
Pith/arXiv arXiv 1910
-
[36]
C. Bao, H. Xu, Y . Qin, and X. Wang. Dexart: Benchmarking generalizable dexterous manip- ulation with articulated objects. InIEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023
2023
-
[37]
Lin, Z.-H
T. Lin, Z.-H. Yin, H. Qi, P. Abbeel, and J. Malik. Twisting lids off with two hands. In Conference on Robot Learning (CoRL), 2024
2024
-
[38]
Jiang, Y
T. Jiang, Y . Guan, L. Ma, J. Xu, J. Meng, W. Chen, Z. Zeng, L. Li, D. Wu, and R. Chen. Dexsim2real2: Building explicit world model for precise articulated object dexterous manipu- lation.IEEE Transactions on Robotics, 41:4360–4379, 2025
2025
-
[39]
Y . Chen, C. Wang, Y . Yang, and C. K. Liu. Object-centric dexterous manipulation from human motion data. InConference on Robot Learning (CoRL), 2024
2024
-
[40]
Mandi, Y
Z. Mandi, Y . Hou, D. Fox, Y . Narang, A. Mandlekar, and S. Song. Dexmachina: Functional retargeting for bimanual dexterous manipulation. InInternational Conference on Machine Learning (ICML), 2026
2026
-
[41]
K. Li, P. Li, T. Liu, Y . Li, and S. Huang. Maniptrans: Efficient dexterous bimanual manipula- tion transfer via residual learning. InIEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025. 11
2025
-
[42]
Y . Liang, Q. Peng, R.-Z. Qiu, and X. Wang. Contrack: Constrained hand motion tracking with adaptive trade-off control.arXiv preprint arXiv:2606.03177, 2026
Pith/arXiv arXiv 2026
-
[43]
Yin and P
Z.-H. Yin and P. Abbeel. Offline imitation learning through graph search and retrieval. In Robotics: Science and Systems (RSS), 2024
2024
-
[44]
C. Wang, H. Shi, W. Wang, R. Zhang, L. Fei-Fei, and C. K. Liu. Dexcap: Scalable and portable mocap data collection system for dexterous manipulation. InRobotics: Science and Systems (RSS), 2024
2024
- [45]
-
[46]
Z. Yang, K. Yin, and L. Liu. Learning to use chopsticks in diverse gripping styles.ACM Transactions on Graphics (TOG), 41(4):1–17, 2022
2022
-
[47]
W. Xu, Y . Zhao, W. Guo, and X. Sheng. Hierarchical reinforcement learning for articulated tool manipulation with multifingered hand. InInternational Conference on Intelligent Robots and Systems (IROS), 2025
2025
-
[48]
S. Atar, D. Huang, F. Richter, and M. Yip. In-hand manipulation of articulated tools with dexterous robot hands with sim-to-real transfer.arXiv preprint arXiv:2509.23075, 2025
arXiv 2025
-
[49]
L. Yang, K. Li, X. Zhan, F. Wu, A. Xu, L. Liu, and C. Lu. Oakink: A large-scale knowledge repository for understanding hand-object interaction. InIEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022
2022
- [50]
-
[51]
M. Mittal, P. Roth, J. Tigue, A. Richard, O. Zhang, P. Du, A. Serrano-Munoz, X. Yao, R. Zur- brügg, N. Rudin, et al. Isaac lab: A gpu-accelerated simulation framework for multi-modal robot learning.arXiv preprint arXiv:2511.04831, 2025
Pith/arXiv arXiv 2025
-
[52]
J. J. Kuffner and S. M. LaValle. Rrt-connect: An efficient approach to single-query path planning. InInternational Conference on Robotics and Automation (ICRA), 2000
2000
-
[53]
N. Carion, L. Gustafson, Y .-T. Hu, S. Debnath, R. Hu, D. Suris, C. Ryali, K. V . Alwala, H. Khedr, A. Huang, et al. Sam 3: Segment anything with concepts.arXiv preprint arXiv:2511.16719, 2025
Pith/arXiv arXiv 2025
-
[54]
B. Wen, S. Dewan, and S. Birchfield. Fast-foundationstereo: Real-time zero-shot stereo match- ing.arXiv preprint arXiv:2512.11130, 2025
arXiv 2025
-
[55]
Jaegle, F
A. Jaegle, F. Gimeno, A. Brock, O. Vinyals, A. Zisserman, and J. Carreira. Perceiver: General perception with iterative attention. InInternational Conference on Machine Learning (ICML), 2021
2021
-
[56]
J. Ho, A. Jain, and P. Abbeel. Denoising diffusion probabilistic models. InNeural Information Processing Systems (NeurIPS), 2020
2020
-
[57]
H. Wang, W. Zhao, X. Wang, S. Huang, H. Lin, B. Zheng, R. Xu, G. Wang, Y . Mu, H. Wang, et al. Dexjoco: A benchmark and toolkit for task-oriented dexterous manipulation on mujoco. arXiv preprint arXiv:2605.16257, 2026
Pith/arXiv arXiv 2026
-
[58]
P. Yin, T. Westenbroek, Z. Zhang, J. Tran, I. Dagnino, E. Shilamkar, N. Mbiziwo-Tiapo, S. Bagaria, X. Liu, G. Mullins, et al. Emergent dexterity via diverse resets and large-scale reinforcement learning. InInternational Conference on Learning Representations (ICLR), 2026. 12 /gid00048/gid00065/gid00073/gid00068/gid00066/gid00083 /gid00036/gid00078/gid0007...
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.