Fibration Trees: A Unified Approach to Multi-Robot Motion Planning
Pith reviewed 2026-06-27 09:22 UTC · model grok-4.3
The pith
Fibration trees unify sequential prioritization, parallel decomposition, and task-space projections under one formalism for multi-robot planning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
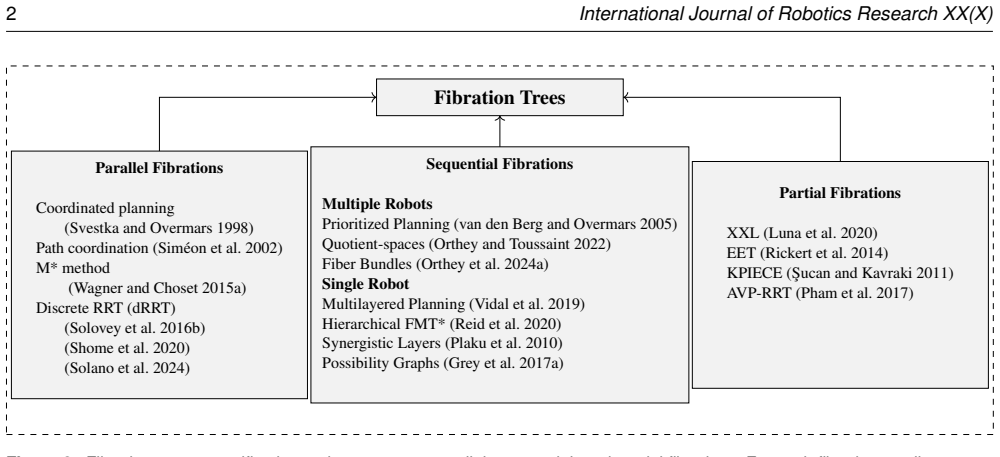
By modeling projections as fibrations, fibration trees unify sequential prioritization, parallel decomposition, and task-space projections under a single coherent formalism. The resulting Fibration-RRT planner operates on user-defined fibration trees, generalizes quotient-space RRT and discrete RRT, includes task-space projections, and is proven probabilistically complete.
What carries the argument
Fibration trees: trees whose nodes are state spaces and whose edges are fibrations, each fibration modeling a projection from a higher-dimensional space to a lower-dimensional or simplified space.
If this is right
- Fibration-RRT handles arbitrary mixtures of prioritization and decomposition strategies without custom code for each combination.
- The planner remains probabilistically complete while operating on any valid user-supplied fibration tree.
- Task-space projections can be inserted directly into the planning hierarchy alongside configuration-space projections.
- High-dimensional instances with up to 96 degrees of freedom become tractable when the supplied tree exploits the problem structure.
- An open-source implementation allows direct reuse on new multi-robot scenarios.
Where Pith is reading between the lines
- The same fibration-tree structure could be attached to other sampling-based planners besides RRT variants.
- Automated discovery or verification of suitable fibration trees would remove the current dependence on manual design.
- The formalism may transfer to single-robot high-dimensional planning or to non-robotics domains that rely on state-space projections.
Load-bearing premise
Users can supply fibration trees whose fibrations correctly capture the geometric and topological relationships between the full configuration space and the chosen subspaces or task spaces.
What would settle it
A multi-robot problem equipped with a fibration tree that correctly models all required projections, yet Fibration-RRT returns no solution after exhaustive sampling or fails to exhibit the probabilistic-completeness property.
Figures











read the original abstract
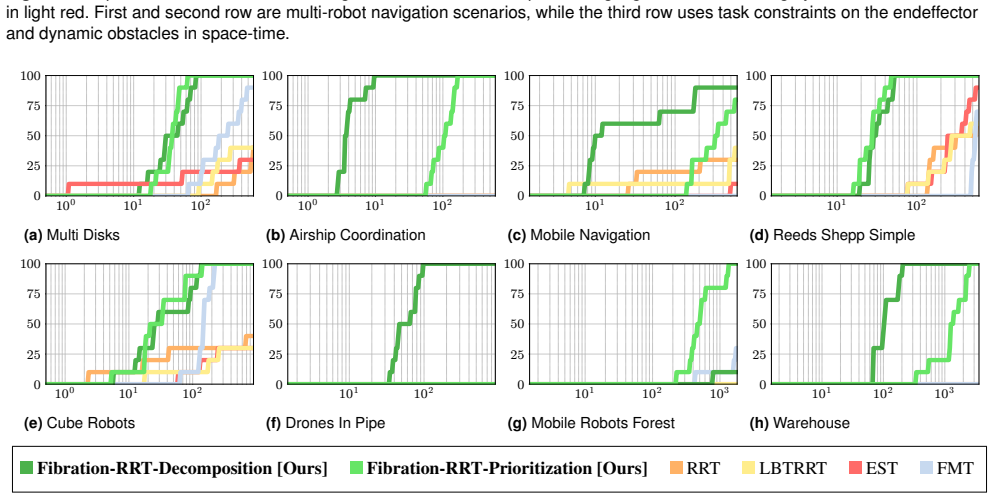
State space projections and decompositions have emerged as powerful tools to tackle the curse of dimensionality in high-dimensional, multi-robot motion planning problems. However, existing methods lack a unified framework which seamlessly handles combinations of projections (prioritization or task-space) and decompositions (parallel or decoupled subspaces). To fill this gap, we introduce fibration trees, which are trees consisting of state spaces as nodes and fibrations as edges, whereby a fibration models a projection from a higher-dimensional space to a lower-dimensional (or simplified) space. By modeling projections as fibrations, we unify sequential prioritization, parallel decomposition, and task-space projections under a single, coherent formalism. Building on this, we develop the rapidly-exploring random fibration trees (Fibration-RRT) planner, a sampling-based motion planner that generalizes strategies from quotient-space RRT (for sequential prioritizations) and discrete RRT (for parallel decompositions), while allowing the inclusion of task-space projections. Fibration-RRT operates on user-defined fibration trees and is proven to be probabilistically complete. To test the generality and efficiency of Fibration-RRT, we provide an open-source implementation and conduct experiments on 32 scenarios using multi robot teams with up to 96 degrees of freedom. Our results indicate that Fibration-RRT efficiently solves high-dimensional problems by exploiting user-defined fibration trees, thereby establishing fibration trees as a powerful, unified framework for multi-robot motion planning.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces fibration trees—trees with configuration spaces as nodes and fibrations as edges—as a unified formalism for modeling projections (prioritization, task-space) and decompositions (parallel, decoupled) in multi-robot motion planning. It presents Fibration-RRT, a sampling-based planner that generalizes quotient-space RRT and discrete RRT, claims a probabilistic-completeness proof for any user-defined fibration tree, and reports experiments on 32 scenarios with robot teams up to 96 DOF, supported by an open-source implementation.
Significance. If the unification and completeness results hold under the stated assumptions, the framework could provide a coherent way to combine existing projection and decomposition strategies, reducing the need for ad-hoc planner variants in high-dimensional problems. The open-source code and scale of the experimental evaluation (32 scenarios, 96 DOF) are concrete strengths that would allow the community to test the approach directly.
major comments (2)
- [Abstract; Fibration-RRT definition and completeness proof] Abstract and Fibration-RRT definition section: the probabilistic-completeness claim is stated to apply to any user-defined fibration tree, yet the manuscript provides no explicit characterization of the validity conditions on the fibrations (specifically, the homotopy lifting property required for path lifting and recursive sampling to cover the full space). This assumption is load-bearing for both the unification and the completeness guarantee; without it, the recursive argument generalizing quotient-space RRT and discrete RRT can fail for merely surjective projections.
- [Experiments (32 scenarios)] Experiments section: the claim that Fibration-RRT 'efficiently solves high-dimensional problems by exploiting user-defined fibration trees' rests on results from 32 scenarios, but the manuscript does not report per-scenario success rates, failure modes when invalid fibrations are supplied, or ablation on tree validity, making it impossible to assess whether the completeness guarantee translates to the tested instances.
minor comments (2)
- [Abstract] Abstract: the term 'fibration' is introduced without a brief topological definition or pointer to the relevant section, which may hinder readers outside algebraic topology.
- [Introduction and definitions] Notation: the distinction between a fibration (as a map with the lifting property) and a general projection is not consistently emphasized in early sections, risking conflation with prior quotient-space work.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below, indicating where revisions will be made.
read point-by-point responses
-
Referee: [Abstract; Fibration-RRT definition and completeness proof] Abstract and Fibration-RRT definition section: the probabilistic-completeness claim is stated to apply to any user-defined fibration tree, yet the manuscript provides no explicit characterization of the validity conditions on the fibrations (specifically, the homotopy lifting property required for path lifting and recursive sampling to cover the full space). This assumption is load-bearing for both the unification and the completeness guarantee; without it, the recursive argument generalizing quotient-space RRT and discrete RRT can fail for merely surjective projections.
Authors: We agree that the completeness result requires fibrations to satisfy the homotopy lifting property. The manuscript adopts the standard topological definition of a fibration (which includes this property by definition) when modeling projections and decompositions. However, the referee is correct that an explicit statement of these validity conditions is not provided in the Fibration-RRT definition or completeness section. We will revise the manuscript to include a clear characterization of the required fibration properties, ensuring the unification and probabilistic-completeness claims are properly conditioned. revision: yes
-
Referee: [Experiments (32 scenarios)] Experiments section: the claim that Fibration-RRT 'efficiently solves high-dimensional problems by exploiting user-defined fibration trees' rests on results from 32 scenarios, but the manuscript does not report per-scenario success rates, failure modes when invalid fibrations are supplied, or ablation on tree validity, making it impossible to assess whether the completeness guarantee translates to the tested instances.
Authors: We will add per-scenario success rates to the experiments section in the revision to provide more granular support for the efficiency claims. The 32 scenarios were evaluated using valid user-defined fibration trees consistent with the framework's assumptions. The completeness guarantee does not apply to invalid fibrations (i.e., those lacking the homotopy lifting property), so experiments focused on valid cases; we will add a clarifying note on this distinction and potential issues with invalid trees, though a full ablation on invalid cases is not planned as it falls outside the method's stated scope. revision: partial
Circularity Check
No circularity: new definitional framework with independent completeness argument
full rationale
The paper introduces fibration trees as a novel tree structure with fibrations as edges and develops Fibration-RRT as a planner operating on user-supplied instances of this structure. Probabilistic completeness is asserted to follow from the recursive sampling properties generalized from prior quotient and discrete RRT methods. No quoted equation or definition reduces a claimed prediction or result to a fitted parameter, self-citation chain, or input by construction. The central unification and completeness statements rest on the new formalism itself rather than on quantities defined in terms of previously fitted values or unverified self-citations, rendering the derivation self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Standard assumptions of sampling-based motion planning (uniform sampling, collision checking, etc.) suffice for probabilistic completeness when the fibration tree is fixed.
invented entities (2)
-
fibration tree
no independent evidence
-
Fibration-RRT
no independent evidence
Reference graph
Works this paper leans on
-
[1]
In: International Conference on Database Theory
Aggarwal CC, Hinneburg A and Keim DA (2001) On the surprising behavior of distance metrics in high dimensional space. In: International Conference on Database Theory. Springer, pp. 420–434. Atias A, Solovey K, Salzman O and Halperin D (2018) Effective metrics for multi-robot motion-planning.International Journal of Robotics Research37(13-14): 1741–1759. B...
2001
-
[2]
IEEE, pp. 271–276. Berenson D, Srinivasa S and Kuffner J (2011) Task space regions: A framework for pose-constrained manipulation planning. International Journal of Robotics Research30(12): 1435–
2011
-
[3]
Bettini M, Shankar A and Prorok A (2023) Heterogeneous multi-robot reinforcement learning
Bettini M, Prorok A and Moens V (2024) Benchmarl: Benchmark- ing multi-agent reinforcement learning.Journal of Machine Learning Research25(217): 1–10. Bettini M, Shankar A and Prorok A (2023) Heterogeneous multi-robot reinforcement learning. In:IEEE International Symposium on Multi-Robot and Multi-Agent Systems. pp. 1485–1494. Bhattacharya S and Ghrist R ...
2024
-
[4]
Gammell JD, Barfoot TD and Srinivasa SS (2020) Batch informed trees (BIT*): Informed asymptotically optimal anytime search
Ferbach P and Barraquand J (1997) A method of progressive constraints for manipulation planning.IEEE Transactions on Robotics13(4): 473–485. Gammell JD, Barfoot TD and Srinivasa SS (2020) Batch informed trees (BIT*): Informed asymptotically optimal anytime search. International Journal of Robotics Research39(5): 543–567. Gammell JD and Strub MP (2021) A s...
1997
-
[5]
PMLR, pp. 103–114. URLhttps://proceedings. mlr.press/v155/ha21a.html. Hartmann VN, Orthey A, Driess D, Oguz OS and Toussaint M (2021) Long-horizon multi-robot rearrangement planning for construction assembly.IEEE Transactions on Robotics39(1): 239–252. Hastie T, Tibshirani R and Friedman J (2009)The elements of statistical learning: data mining, inference...
2021
-
[6]
H¨onig W, Preiss JA, Kumar TKS, Sukhatme GS and Ayanian N (2018) Trajectory planning for quadrotor swarms.IEEE Transactions on Robotics34(4): 856–869. Hopcroft JE, Schwartz JT and Sharir M (1984) On the complexity of motion planning for multiple independent objects; pspace- hardness of the” warehouseman’s problem”.International Journal of Robotics Researc...
-
[7]
Kavraki LE, Svestka P, Latombe JC and Overmars MH (1996) Probabilistic roadmaps for path planning in high-dimensional configuration spaces.IEEE Transactions on Robotics12(4): 566–580. Keisuke O and Xavier D (2023) Quick multi-robot motion planning by combining sampling and search.Proceedings of the Thirty- Second International Joint Conference on Artifici...
-
[8]
Lavalle SM (1998) Rapidly-exploring random trees: A new tool for path planning
Lai M, Go K, Li Z, Kr ¨oger T, Schaal S, Allen K and Scholz J (2025) Roboballet: Planning for multirobot reaching with graph neural networks and reinforcement learning.Science Robotics10(106): eads1204. Lavalle SM (1998) Rapidly-exploring random trees: A new tool for path planning. Technical report, Iowa State University. LaValle SM (2006)Planning Algorit...
2025
-
[9]
URLhttps://doi.org/ 10.21105/joss.00500
DOI:10.21105/joss.00500. URLhttps://doi.org/ 10.21105/joss.00500. Lee J, Grey MX, Ha S, Kunz T, Jain S, Ye Y , Srinivasa SS, Stilman M and Liu CK (2018b) Dart: Dynamic animation and robotics toolkit.Journal of Open Source Software3(22):
-
[10]
New York, NY: Springer New York
Lee JM (2003)Introduction to Smooth Manifolds. New York, NY: Springer New York. Li S and Dantam NT (2023) A sampling and learning framework to prove motion planning infeasibility.International Journal of Robotics Research42(10): 938–956. DOI:10. 1177/02783649231154674. URLhttps://doi.org/10. 1177/02783649231154674. Liang J, Christopher JK, Koenig S and Fi...
arXiv 2003
-
[11]
pp. 7643–7650. McBeth C, Motes J, Uwacu D, Morales M and Amato NM (2023) Scalable multi-robot motion planning for congested environments with topological guidance.IEEE Robotics and Automation Letters8(11): 6867–6874. DOI:10.1109/LRA. 2023.3312980. Moldagalieva A, Ortiz-Haro J, Toussaint M and H ¨onig W (2024) db-cbs: Discontinuity-bounded conflict-based s...
work page doi:10.1109/lra 2023
-
[12]
Sampling-based motion p lanning: A comparative review,
DOI:10.1007/ s40295-025-00473-w. URLhttps://doi.org/10. 1007/s40295-025-00473-w. Orthey A, Akbar S and Toussaint M (2024a) Multilevel motion planning: A fiber bundle formulation.The International Journal of Robotics Research43(1): 3–33. DOI:10. 1177/02783649231209337. URLhttps://doi.org/10. 1177/02783649231209337. Orthey A, Chamzas C and Kavraki LE (2024b...
-
[13]
In: Asfour T, Yoshida E, Park J, Christensen H and Khatib O (eds.) Robotics Research
Orthey A and Toussaint M (2022) Rapidly-exploring quotient-space trees: Motion planning using sequential simplifications. In: Asfour T, Yoshida E, Park J, Christensen H and Khatib O (eds.) Robotics Research. Cham: Springer International Publishing, pp. 52–68. Parque V and Miyashita T (2023) Multi-Robot Coordinated Motion Planning at Intersections using La...
-
[14]
Sebasti´an E, Duong T, Atanasov N, Montijano E and Sag ¨u´es C (2025) Physics-informed multi-agent reinforcement learning for distributed multi-robot problems.IEEE Transactions on Robotics. Shaoul Y , Mishani I, Vats S, Li J and Likhachev M (2025) Multi- robot motion planning with diffusion models. In:International Conference on Learning Representations. ...
arXiv 2025
-
[15]
Sun D and Liao Q (2025) Real-time coordination of multiple robotic arms with reactive trajectory modulation.IEEE Transactions on Robotics41: 200–219. Svestka P and Overmars MH (1995) Coordinated motion planning for multiple car-like robots using probabilistic roadmaps. In: IEEE International Conference on Robotics and Automation. Prepared usingsagej.cls O...
-
[16]
IEEE, pp. 1224–1229. van den Berg J, Guy SJ, Lin M and Manocha D (2011) Reciprocal n-body collision avoidance. In: Pradalier C, Siegwart R and Hirzinger G (eds.)Robotics Research. Berlin, Heidelberg: Springer Berlin Heidelberg, pp. 3–19. van den Berg J and Overmars M (2005) Prioritized motion planning for multiple robots. In:IEEE International Conference ...
arXiv 2011
-
[17]
Welde* J, Rao* N, Kunapuli* P, Jayaraman D and Kumar V (2024) Leveraging symmetry to accelerate learning of trajectory tracking controllers for free-flying robotic systems.arXiv. Wermelinger M, Fankhauser P, Diethelm R, Kr ¨usi P, Siegwart R and Hutter M (2016) Navigation planning for legged robots in challenging terrain. In:IEEE International Conference ...
-
[18]
It formalizes a projection from the sphereS 3 (an object embeddable in four-dimensional space) to the sphere S2 (embeddable in three-dimensional space)
is a prototypical example of a fibration. It formalizes a projection from the sphereS 3 (an object embeddable in four-dimensional space) to the sphere S2 (embeddable in three-dimensional space). The main idea is to decomposeS 3 into subspaces (also called cosets (Judson 2023)) of identical copies ofS
2023
-
[19]
Its relevance to motion planning comes from the double cover ofSO(3)by the sphereS 3.SO(3)is equivalent (homeomorphic) toS 3 with antipodal points identified, i.e
Each copy ofS 1 is then associated to a point onS 2 (taking the quotient ofS 3/S1 and associating equivalence classes of the quotient withS 2). Its relevance to motion planning comes from the double cover ofSO(3)by the sphereS 3.SO(3)is equivalent (homeomorphic) toS 3 with antipodal points identified, i.e. SO(3) ∼= S3/{x∼ −x}(Yershova et al. 2010). This c...
2010
-
[20]
or by constructing controllers for UA Vs which are less prone to singularities (Watterson and Kumar 2020). In our example, we use the Hopf mapping, whereby points onS 3 are associated with quaternions, which are elementsq, represented by tuples(a, b, c, d)such thatq=a+b·i+c· j+d·kand∥q∥=
2020
-
[21]
Fibration- RRT is fulfilling this property inPlanNode, since it is based upon RRT (Kuffner and LaValle 2000)
are possible. Fibration- RRT is fulfilling this property inPlanNode, since it is based upon RRT (Kuffner and LaValle 2000). 2.Uniform Infinite Recurrence. Given a fibration tree, we assume that every node in a fibration tree is chosen infinitely many times when the number of iterations of the planner goes to infinity. This is fulfilled by the SelectNodefu...
2000
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.