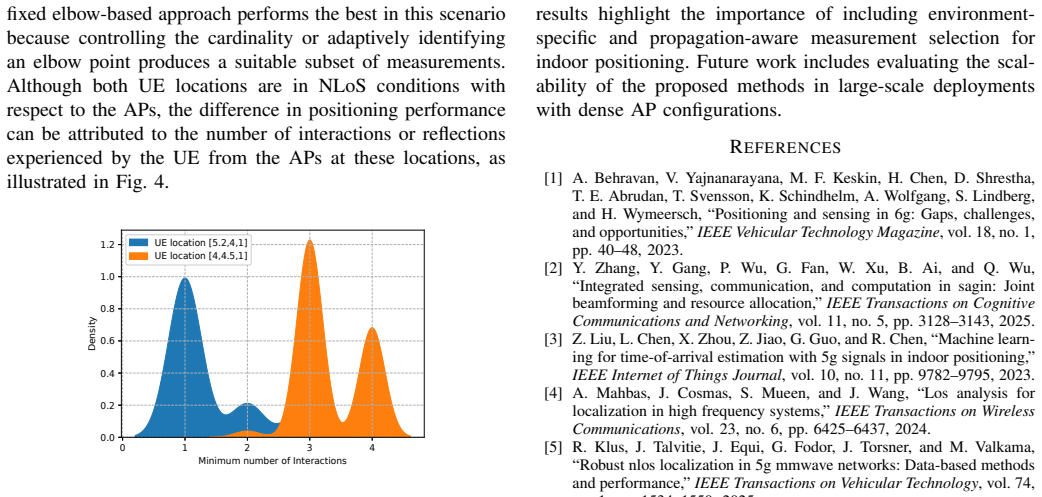
Measurement Selection Strategies for Position Estimation in Indoor Environments
Pith reviewed 2026-05-20 03:10 UTC · model grok-4.3
The pith
Measurement selection based on access point neighborhoods from ray-tracing improves indoor position estimation accuracy when non-line-of-sight paths dominate.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By deriving access point neighborhood information through a ray-tracing simulator and applying selection strategies including cardinality-based selection, intersection and union of neighborhood measurements, and fixed selection, the accuracy of time-based indoor positioning can be enhanced even when many links suffer from non-line-of-sight propagation.
What carries the argument
AP neighborhood information obtained from ray-tracing, which identifies clusters of access points with comparable propagation paths to the user equipment, serving as the basis for filtering measurements to exclude those likely affected by occlusion.
If this is right
- Position estimates remain usable in heavily obstructed rooms without additional hardware or calibration steps.
- Cardinality selection from each neighborhood offers a straightforward way to balance coverage and reliability.
- Intersection focuses on the strongest overlapping measurements across neighborhoods for minimal error.
- Union includes more data points while still discarding the most problematic ones identified by the simulator.
Where Pith is reading between the lines
- If the simulator neighborhoods translate well to live data, similar selection logic could be applied in real time by updating neighborhoods from recent measurements.
- Extending the approach to other ranging technologies like ultra-wideband might yield comparable gains in cluttered spaces.
- Comparing the selected subsets against machine learning based outlier rejection methods would clarify whether the geometric insight adds unique value.
Load-bearing premise
The neighborhoods identified by the ray-tracing simulator correspond closely enough to actual signal paths that applying the selection rules on real measurements produces measurably better position estimates.
What would settle it
A controlled test in a physical indoor space where ground-truth locations are known, measuring the positioning error with and without the proposed selection strategies, and finding that errors stay the same or increase with selection would disprove the central claim.
Figures


read the original abstract
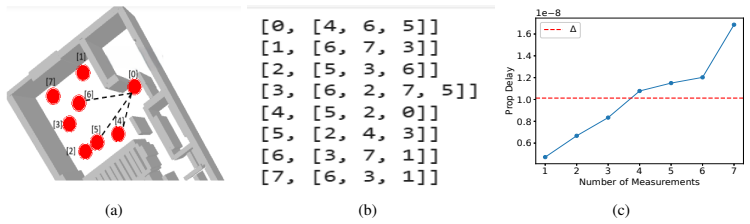
Time-based indoor positioning techniques rely on multiple access points (APs) and measurements between the user equipment (UE) and the APs. In dense indoor environments, occlusion-induced non-line-of-sight (NLoS) propagation introduces significant delays in these measurements, thereby degrading position estimation accuracy. To address this challenge, this paper proposes measurement selection strategies to improve position estimation accuracy. A ray-tracing (RT) simulator is employed to characterize the propagation environment and derive AP neighborhood information, which is subsequently used to design and evaluate different measurement selection strategies. The approaches explored include AP neighborhood-based cardinality selection, intersection and union of measurements from AP neighborhoods, and fixed measurement selection. Experiments demonstrate the efficacy of the proposed measurement selection strategies in environments under significant NLoS conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes measurement selection strategies for time-based indoor positioning to mitigate non-line-of-sight (NLoS) propagation effects. It employs a ray-tracing simulator to characterize the environment and derive AP neighborhood information, which is then used to implement cardinality-based selection, intersection/union of measurements from AP neighborhoods, and fixed selection. The abstract asserts that experiments demonstrate the efficacy of these strategies in environments with significant NLoS conditions.
Significance. If the central claim holds, the work offers a simulation-assisted approach to improve robustness in indoor ToA-based localization by selecting measurements less affected by occlusion. The use of ray-tracing to generate AP neighborhoods provides a structured, model-driven way to inform selection rules. This could be valuable for dense indoor deployments where exhaustive real-world measurement campaigns are costly. However, the significance is constrained by the simulation-only evaluation scope.
major comments (2)
- [Abstract] Abstract: The assertion that 'experiments demonstrate the efficacy' is unsupported by any reported quantitative metrics (e.g., RMSE or CDF of positioning error), baselines (e.g., all-AP or random selection), or statistical significance tests. Without these, the improvement attributable to the selection strategies cannot be verified.
- [Experiments] Experiments section: All strategy evaluations occur inside the same ray-tracing simulator used to derive the AP neighborhoods. No hold-out real ToA measurement campaign or cross-validation is described in which the selection rules are applied to physical measurements collected in the same geometry. This is load-bearing for the claim of improved accuracy under real NLoS, as unmodeled effects (wall permittivity mismatch, furniture scattering, or synchronization offsets) could cause the selected subsets to underperform on actual data.
minor comments (2)
- [Methodology] Clarify the underlying position estimation algorithm (e.g., nonlinear least squares, weighted least squares, or iterative methods) and how the selected measurements are fed into it.
- [Measurement Selection Strategies] Provide explicit definitions and pseudocode for the intersection, union, and cardinality operations on AP neighborhoods to improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. The comments highlight important aspects for strengthening the presentation of our results and clarifying the scope of the evaluation. We address each major comment below and indicate the revisions we will make.
read point-by-point responses
-
Referee: [Abstract] Abstract: The assertion that 'experiments demonstrate the efficacy' is unsupported by any reported quantitative metrics (e.g., RMSE or CDF of positioning error), baselines (e.g., all-AP or random selection), or statistical significance tests. Without these, the improvement attributable to the selection strategies cannot be verified.
Authors: We agree that the abstract would benefit from including specific quantitative support for the efficacy claim. The Experiments section of the manuscript reports RMSE values, CDF plots of positioning error, and comparisons against baselines including the all-AP case and random selection. To directly address the concern, we will revise the abstract to incorporate key quantitative results (e.g., observed RMSE reductions under NLoS conditions) and explicitly reference the baselines used. revision: yes
-
Referee: [Experiments] Experiments section: All strategy evaluations occur inside the same ray-tracing simulator used to derive the AP neighborhoods. No hold-out real ToA measurement campaign or cross-validation is described in which the selection rules are applied to physical measurements collected in the same geometry. This is load-bearing for the claim of improved accuracy under real NLoS, as unmodeled effects (wall permittivity mismatch, furniture scattering, or synchronization offsets) could cause the selected subsets to underperform on actual data.
Authors: We acknowledge that the evaluations are conducted within the same ray-tracing simulator employed to generate the AP neighborhood information. This design enables a controlled, model-consistent assessment of how the selection strategies perform under the simulated propagation conditions. We recognize that real-world ToA data would provide stronger validation against unmodeled effects. In the revised version we will expand the Experiments and Conclusions sections to clearly state the simulation-only scope, discuss potential gaps with physical measurements, and outline future work on real-environment cross-validation. revision: partial
Circularity Check
No significant circularity in derivation chain
full rationale
The paper derives AP neighborhood information from a ray-tracing simulator and uses it to design and evaluate measurement selection strategies (cardinality, intersection/union, fixed) within the same simulation framework. No quoted step reduces a claimed prediction or result to its inputs by construction, no fitted parameter is relabeled as a prediction, and no load-bearing self-citation or uniqueness theorem is invoked. The central efficacy claim is supported by simulation experiments under modeled NLoS conditions and remains independent of the inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Ray-tracing simulations can accurately characterize indoor propagation environments and derive reliable AP neighborhood information for measurement selection.
Reference graph
Works this paper leans on
-
[1]
Positioning and sensing in 6g: Gaps, challenges, and opportunities,
A. Behravan, V . Y ajnanarayana, M. F. Keskin, H. Chen, D. Shrestha, T. E. Abrudan, T. Svensson, K. Schindhelm, A. Wolfgang, S. Lindberg, and H. Wymeersch, “Positioning and sensing in 6g: Gaps, challenges, and opportunities,” IEEE V ehicular Technology Magazine, vol. 18, no. 1, pp. 40–48, 2023
work page 2023
-
[2]
Y . Zhang, Y . Gang, P . Wu, G. Fan, W. Xu, B. Ai, and Q. Wu, “Integrated sensing, communication, and computation in sagin: Joint beamforming and resource allocation,” IEEE Transactions on Cognitive Communications and Networking , vol. 11, no. 5, pp. 3128–3143, 2025
work page 2025
-
[3]
Machine learn- ing for time-of-arrival estimation with 5g signals in indoor positioning,
Z. Liu, L. Chen, X. Zhou, Z. Jiao, G. Guo, and R. Chen, “Machine learn- ing for time-of-arrival estimation with 5g signals in indoor positioning,” IEEE Internet of Things Journal , vol. 10, no. 11, pp. 9782–9795, 2023
work page 2023
-
[4]
Los analysis for localization in high frequency systems,
A. Mahbas, J. Cosmas, S. Mueen, and J. Wang, “Los analysis for localization in high frequency systems,” IEEE Transactions on Wireless Communications, vol. 23, no. 6, pp. 6425–6437, 2024
work page 2024
-
[5]
Robust nlos localization in 5g mmwave networks: Data-based methods and performance,
R. Klus, J. Talvitie, J. Equi, G. Fodor, J. Torsner, and M. V alkama, “Robust nlos localization in 5g mmwave networks: Data-based methods and performance,” IEEE Transactions on V ehicular Technology, vol. 74, no. 1, pp. 1534–1550, 2025
work page 2025
-
[6]
Angle-only outdoor localization at 3.5/7.5 ghz using nvidia sionna rt,
B. Kim and S. Hong, “Angle-only outdoor localization at 3.5/7.5 ghz using nvidia sionna rt,” in 2025 16th International Conference on Information and Communication Technology Convergence (ICTC) , 2025, pp. 753–756
work page 2025
-
[7]
S. Xu, L. Wu, K. Doançay, and M. Alaee-Kerahroodi, “A hybrid approach to optimal toa-sensor placement with fixed shared sensors for simultaneous multi-target localization,” IEEE Transactions on Signal Processing, vol. 70, pp. 1197–1212, 2022
work page 2022
-
[8]
Dynamic and robust sensor selection strategies for wireless positioning with toa/rss measurement,
M. S. Oh, S. Hosseinalipour, T. Kim, D. J. Love, J. V . Krogmeier, and C. G. Brinton, “Dynamic and robust sensor selection strategies for wireless positioning with toa/rss measurement,” IEEE Transactions on V ehicular Technology, vol. 72, no. 11, pp. 14 656–14 672, 2023
work page 2023
-
[9]
A. Aubry, P . Babu, A. De Maio, G. Fatima, and N. Sahu, “A robust framework to design optimal sensor locations for toa or rss source lo- calization techniques,” IEEE Transactions on Signal Processing, vol. 71, pp. 1293–1306, 2023
work page 2023
-
[10]
Optimal sensor placement for hybrid source localization using fused toarssaoa measurements,
K. Panwar, G. Fatima, and P . Babu, “Optimal sensor placement for hybrid source localization using fused toarssaoa measurements,” IEEE Transactions on Aerospace and Electronic Systems , vol. 59, no. 2, pp. 1643–1657, 2023
work page 2023
-
[11]
Toa and tdoa estimation using artificial neural networks for high-accuracy ranging,
A. Kirmaz, T. ahin, D. S. Michalopoulos, and W. Gerstacker, “Toa and tdoa estimation using artificial neural networks for high-accuracy ranging,” IEEE Journal on Selected Areas in Communications , vol. 41, no. 12, pp. 3816–3830, 2023
work page 2023
-
[12]
A review of linear multilateration techniques and applications,
E. Widdison and D. G. Long, “A review of linear multilateration techniques and applications,” IEEE Access , vol. 12, pp. 26 251–26 266, 2024
work page 2024
-
[13]
Augmented nonlin- ear least squares estimation with applications to localization,
Q. Li, J. Lan, L. Zhang, B. Chen, and K. Zhu, “Augmented nonlin- ear least squares estimation with applications to localization,” IEEE Transactions on Aerospace and Electronic Systems , vol. 58, no. 2, pp. 1042–1054, 2022
work page 2022
-
[14]
A ray-tracing based fingerprinting method for passive localization in urban nlos environment,
Q. Liu, S. Xu, J. W. Lee, C. Y uen, and S. G. Razul, “A ray-tracing based fingerprinting method for passive localization in urban nlos environment,” in ICASSP 2024 - 2024 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) , 2024, pp. 8631– 8635
work page 2024
-
[15]
Time of arrival and angle of arrival estimation of lte signals for positioning applications,
A. Pin et al. , “Time of arrival and angle of arrival estimation of lte signals for positioning applications,” 2020
work page 2020
-
[16]
Improved k-means algorithm for nearby target localization,
Z. Y uan, X. Wang, F. Chen, and X. Ma, “Improved k-means algorithm for nearby target localization,” IEEE Access, vol. 13, pp. 14 872–14 880, 2025
work page 2025
-
[17]
Toa/rss-based source localization using probabilistic model in mixed los/nlos environments,
M. R. Shamsian and F. Behnia, “Toa/rss-based source localization using probabilistic model in mixed los/nlos environments,” IEEE Transactions on V ehicular Technology, vol. 74, no. 3, pp. 4473–4484, 2025
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.