From Grasps to Dexterity: Large-Scale Grasp Pretraining for Dexterous Manipulation
Pith reviewed 2026-07-01 01:56 UTC · model grok-4.3
The pith
Pretraining a low-level controller on 355k grasp trajectories transfers to articulated tool-use tasks and raises real-world success by 33.3 points over diffusion baselines.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
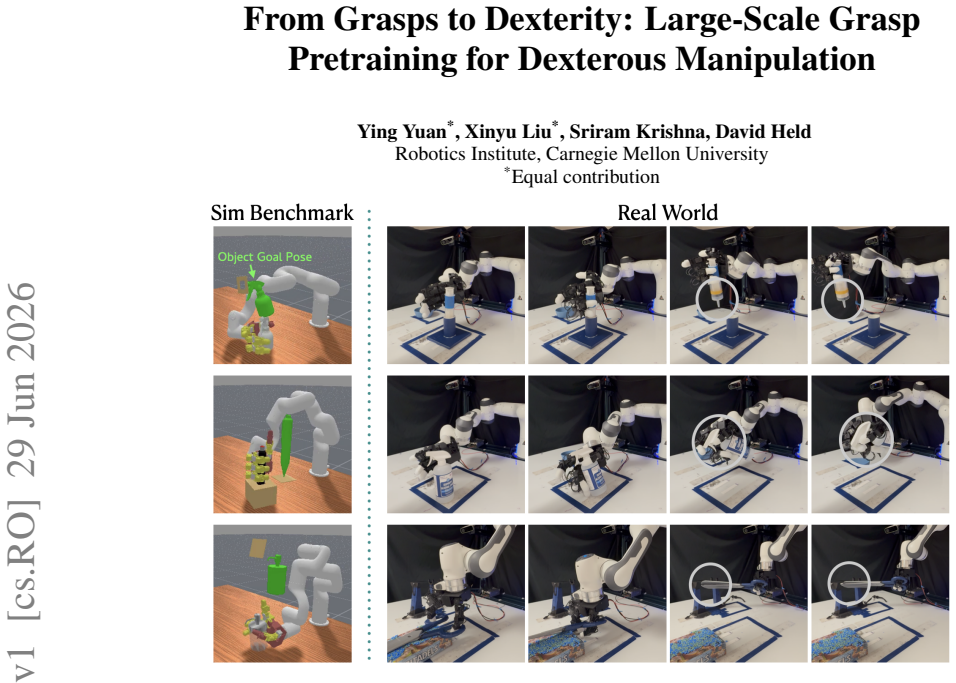
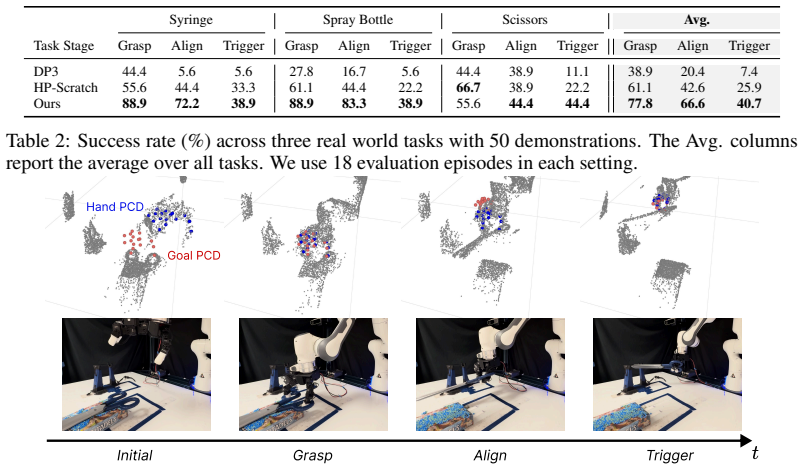
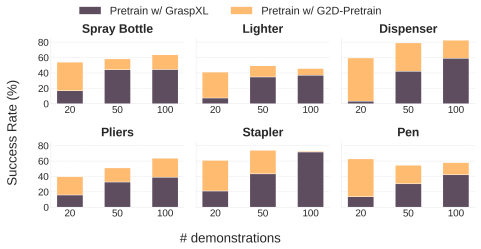
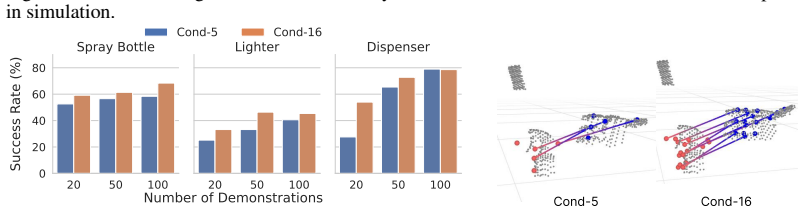
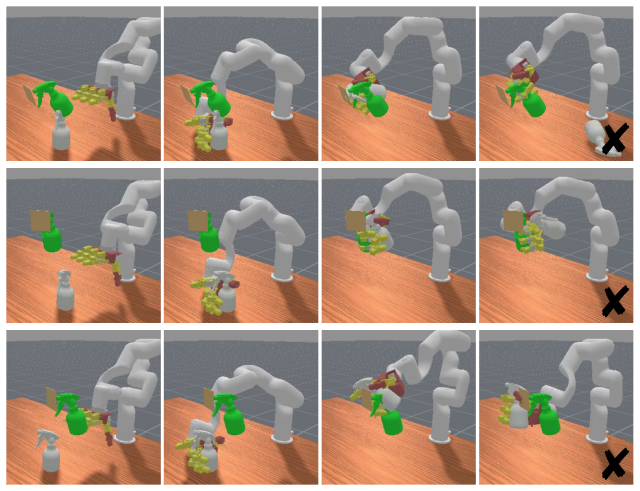
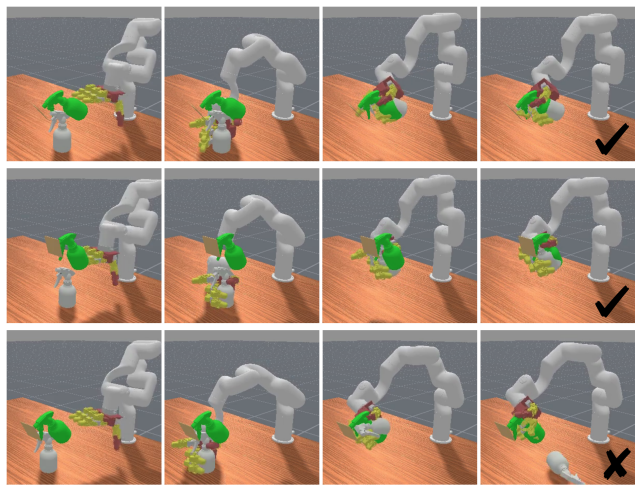
A low-level goal-conditioned controller pretrained on a 355k-trajectory dexterous-grasp dataset, then fine-tuned within a hierarchical imitation-learning framework, produces higher success on articulated tool-use tasks than end-to-end diffusion policies or scratch-trained hierarchical baselines; in real-world tests the method raises full-task success by 33.3 percentage points over DP3.
What carries the argument
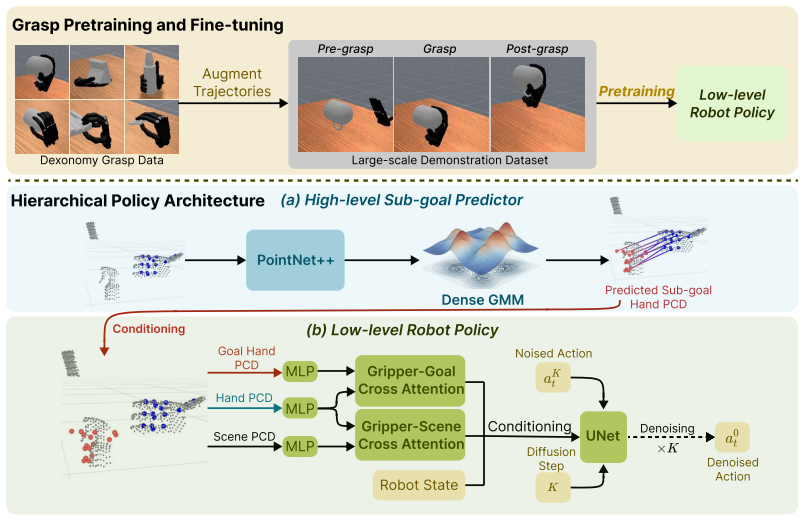
Hierarchical imitation learning that pairs high-level hand sub-goal prediction with a low-level goal-conditioned controller first pretrained on large-scale grasp data.
If this is right
- Grasp datasets become a scalable source of pretraining data for contact-rich dexterous manipulation rather than only for grasp synthesis.
- The same low-level controller can be reused across multiple downstream tool tasks after brief fine-tuning.
- Performance gains appear in both simulation and real-world settings, with the largest measured lift in real-robot full-task completion.
- Hierarchical policies that separate sub-goal planning from low-level control benefit more from grasp pretraining than flat end-to-end policies.
Where Pith is reading between the lines
- If the transfer holds, future work could collect even larger grasp corpora specifically to bootstrap controllers for longer-horizon manipulation sequences.
- The approach suggests that grasp data may supply useful priors for any task whose low-level motions resemble the finger configurations seen during grasping.
- One could test whether the same pretraining step accelerates learning when the high-level policy is also learned rather than provided by demonstrations.
Load-bearing premise
A controller trained only on static grasp examples will still produce stable, coordinated finger motion when the robot must keep contact and drive moving parts of a tool.
What would settle it
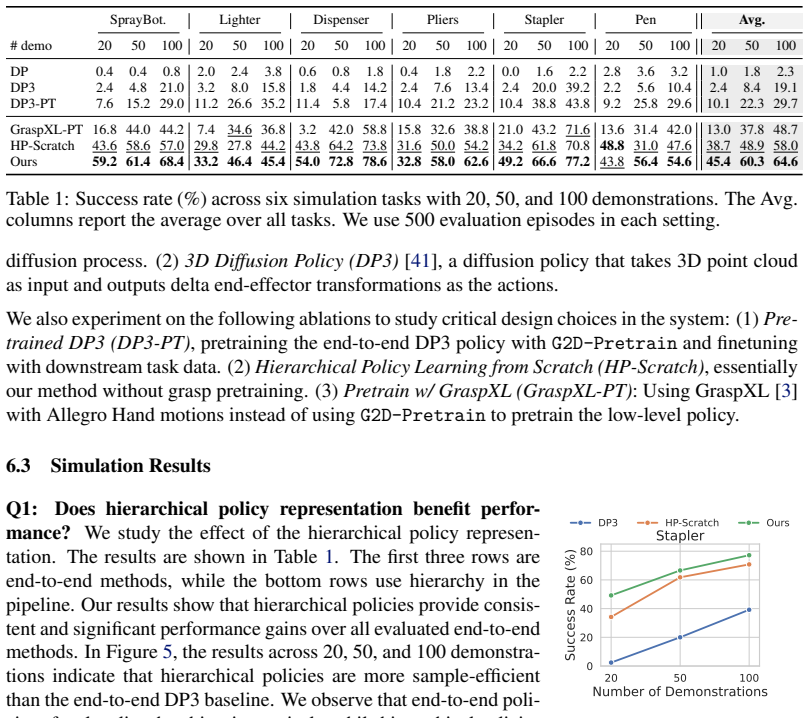
On the six DexCraft tasks, the grasp-pretrained hierarchical policy shows no improvement over an identical hierarchical policy trained from scratch or over an end-to-end diffusion policy.
Figures
read the original abstract
Large-scale dexterous grasp datasets encode rich priors over hand-object interaction, but their use has largely been confined to grasp generation and pick-and-place manipulation. We study whether such data can instead support functional dexterity in articulated tool use, where a robot must acquire a tool, maintain contact, and operate its functional moving parts. We adapt a hierarchical imitation learning framework that combines high-level hand sub-goal prediction with a low-level goal-conditioned controller. We construct a 355k-trajectory grasp-pretraining dataset from large-scale dexterous grasp annotations and use it to pretrain the low-level controller. The controller is then fine-tuned on downstream task demonstrations. To evaluate this setting, we introduce DexCraft, a simulation benchmark with six articulated tool-use tasks requiring coordinated finger motion. Across simulation and real-world experiments, our approach outperforms end-to-end diffusion policy baselines and hierarchical policies trained from scratch. In the real world, it improves full-task success by 33.3 percentage points over DP3. These results show that grasp datasets can serve not only as resources for grasp synthesis, but also as scalable pretraining data for contact-rich dexterous manipulation. Videos are shown on https://yingyuan0414.github.io/grasp2dexterity/ .
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes pretraining a low-level goal-conditioned controller on a 355k-trajectory dataset derived from large-scale dexterous grasp annotations, then fine-tuning it within a hierarchical imitation learning framework (high-level sub-goal prediction + low-level controller) on downstream demonstrations. It introduces the DexCraft simulation benchmark consisting of six articulated tool-use tasks and reports that the approach outperforms end-to-end diffusion policy baselines (DP3) and hierarchical policies trained from scratch, with a 33.3 percentage point gain in real-world full-task success over DP3.
Significance. If the results hold, the work is significant because it demonstrates that existing large-scale grasp datasets can provide useful priors for contact-rich, sustained-contact dexterous manipulation beyond pick-and-place, rather than being limited to grasp synthesis. The real-world experiments, direct baseline comparisons, and introduction of DexCraft are concrete strengths; the scale of the pretraining data and explicit description of the fine-tuning protocol support the central claim of transferable low-level control.
minor comments (2)
- [Abstract, §4] Abstract and §4: performance deltas (including the 33.3 pp real-world gain) are reported without explicit mention of number of trials, error bars, or statistical tests; adding these to the result tables would strengthen the comparison claims.
- [§3.2] §3.2: the construction of the 355k-trajectory grasp-pretraining dataset from annotations is described at a high level; a short additional paragraph on filtering criteria or annotation sources would aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the positive review, the recognition of the work's significance in extending grasp datasets to contact-rich dexterous manipulation, and the recommendation for minor revision. The report correctly identifies the core contributions, including the 355k-trajectory pretraining dataset, the hierarchical framework, the DexCraft benchmark, and the 33.3 pp real-world gain over DP3. No major comments were listed in the report.
Circularity Check
No significant circularity identified
full rationale
The paper pretrains a low-level goal-conditioned controller on a distinct 355k-trajectory grasp dataset constructed from large-scale annotations, then fine-tunes it on separate downstream task demonstrations for the DexCraft benchmark. Reported gains (e.g., 33.3 pp real-world improvement over DP3) are obtained via direct experimental comparisons to end-to-end diffusion policies and from-scratch hierarchical baselines in both simulation and real settings. No equations, fitted parameters, or self-citations are shown to reduce the central claims or performance metrics to quantities defined by the same inputs; the pretraining and evaluation data sources remain independent.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
- [1]
-
[2]
J. Chen, Y . Ke, L. Peng, and H. Wang. Dexonomy: Synthesizing all dexterous grasp types in a grasp taxonomy.Robotics: Science and Systems, 2025
2025
-
[3]
Zhang, S
H. Zhang, S. Christen, Z. Fan, O. Hilliges, and J. Song. GraspXL: Generating grasping motions for diverse objects at scale. InEuropean Conference on Computer Vision (ECCV), 2024
2024
-
[4]
J. Ye, K. Wang, C. Yuan, R. Yang, Y . Li, J. Zhu, Y . Qin, X. Zou, and X. Wang. Dex1b: Learning with 1b demonstrations for dexterous manipulation. InRobotics: Science and Systems (RSS), 2025
2025
-
[5]
Zhang, H
J. Zhang, H. Liu, D. Li, X. Yu, H. Geng, Y . Ding, J. Chen, and H. Wang. Dexgraspnet 2.0: Learning generative dexterous grasping in large-scale synthetic cluttered scenes. In8th Annual Conference on Robot Learning, 2024
2024
-
[6]
Z. Weng, H. Lu, D. Kragic, and J. Lundell. Dexdiffuser: Generating dexterous grasps with diffusion models.IEEE Robotics and Automation Letters, 9(12):11834–11840, 2024. doi: 10.1109/LRA.2024.3498776
- [7]
- [8]
-
[9]
Rajeswaran, V
A. Rajeswaran, V . Kumar, A. Gupta, G. Vezzani, J. Schulman, E. Todorov, and S. Levine. Learning Complex Dexterous Manipulation with Deep Reinforcement Learning and Demon- strations. InProceedings of Robotics: Science and Systems (RSS), 2018
2018
-
[10]
C. Bao, H. Xu, Y . Qin, and X. Wang. Dexart: Benchmarking generalizable dexterous manip- ulation with articulated objects. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 21190–21200, 2023
2023
- [11]
-
[12]
Krishna, B
S. Krishna, B. Eisner, H. Zhan, Y . Yuan, H. Zhen, C. Gan, S. Tulsiani, and D. Held. Ghost: Hierarchical sub-goal policies for generalizing robot manipulation. InRobotics: Science and Systems (RSS), 2026
2026
-
[13]
M. T. Ciocarlie, C. Goldfeder, and P. K. Allen. Dexterous grasping via eigengrasps : A low-dimensional approach to a high-complexity problem. 2007. URLhttps://api. semanticscholar.org/CorpusID:6853822
2007
-
[14]
A. Miller and P. Allen. Graspit! a versatile simulator for robotic grasping.IEEE Robotics & Automation Magazine, 11(4):110–122, 2004. doi:10.1109/MRA.2004.1371616
-
[15]
D. Berenson and S. S. Srinivasa. Grasp synthesis in cluttered environments for dexterous hands. InHumanoids 2008 - 8th IEEE-RAS International Conference on Humanoid Robots, pages 189–196, 2008. doi:10.1109/ICHR.2008.4755944. 9
-
[16]
In: IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2021, virtual, June 19-25, 2021
P. Grady, C. Tang, C. D. Twigg, M. V o, S. Brahmbhatt, and C. C. Kemp. Contactopt: Optimiz- ing contact to improve grasps. In2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 1471–1481, 2021. doi:10.1109/CVPR46437.2021.00152
-
[17]
Mandikal and K
P. Mandikal and K. Grauman. Learning dexterous grasping with object-centric visual affor- dances.2021 IEEE International Conference on Robotics and Automation (ICRA), pages 6169–6176, 2020. URLhttps://api.semanticscholar.org/CorpusID:233439776
2021
-
[18]
In: 2019 IEEE/RSJ International Conference on Intelli- gent Robots and Systems (IROS)
S. Brahmbhatt, A. Handa, J. Hays, and D. Fox. Contactgrasp: Functional multi-finger grasp synthesis from contact. In2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 2386–2393, 2019. doi:10.1109/IROS40897.2019.8967960
-
[19]
P. Li, T. Liu, Y . Li, Y . Geng, Y . Zhu, Y . Yang, and S. Huang. Gendexgrasp: Generalizable dex- terous grasping. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 8068–8074, 2023. doi:10.1109/ICRA48891.2023.10160667
-
[20]
D. Turpin, L. Wang, E. Heiden, Y .-C. Chen, M. Macklin, S. Tsogkas, S. Dickinson, and A. Garg. Grasp’d: Differentiable contact-rich grasp synthesis for multi-fingered hands. InComputer Vision – ECCV 2022: 17th European Conference, Tel Aviv, Israel, October 23–27, 2022, Proceedings, Part VI, page 201–221, Berlin, Heidelberg, 2022. Springer-Verlag. ISBN 978...
-
[21]
Seita, Y
D. Seita, Y . Wang, S. Shetty, E. Li, Z. Erickson, and D. Held. Toolflownet: Robotic manipu- lation with tools via predicting tool flow from point clouds. InConference on Robot Learning (CoRL), 2022
2022
-
[22]
C. Qi, Y . Wu, L. Yu, H. Liu, B. Jiang, X. Lin, and D. Held. Learning generalizable tool- use skills through trajectory generation. InIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
2024
- [23]
-
[24]
Manuelli, W
L. Manuelli, W. Gao, P. Florence, and R. Tedrake. Kpam: Keypoint affordances for category- level robotic manipulation. In T. Asfour, E. Yoshida, J. Park, H. Christensen, and O. Khatib, editors,Robotics Research, pages 132–157, Cham, 2022. Springer International Publishing
2022
-
[25]
Agarwal, S
A. Agarwal, S. Uppal, K. Shaw, and D. Pathak. Dexterous functional grasping. In7th An- nual Conference on Robot Learning, 2023. URLhttps://openreview.net/forum?id= 93qz1k6_6h
2023
-
[26]
Hadjivelichkov, S
D. Hadjivelichkov, S. Zwane, M. Deisenroth, L. Agapito, and D. Kanoulas. One-Shot Transfer of Affordance Regions? AffCorrs! In K. Liu, D. Kulic, and J. Ichnowski, editors,Proceedings of The 6th Conference on Robot Learning (CoRL), volume 205 ofProceedings of Machine Learning Research, pages 550–560, 14–18 Dec 2023
2023
-
[27]
S. Bahl, R. Mendonca, L. Chen, U. Jain, and D. Pathak. Affordances from human videos as a versatile representation for robotics. 2023
2023
-
[28]
Y . Ye, X. Li, A. Gupta, S. De Mellon, S. Birchfield, J. Song, S. Tulsiani, and S. Liu. Affordance diffusion: Synthesizing hand-object interactions. In2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 22479–22489, 2023. doi:10.1109/CVPR52729. 2023.02153
-
[29]
Y . Qin, B. Huang, Z.-H. Yin, H. Su, and X. Wang. Dexpoint: Generalizable point cloud reinforcement learning for sim-to-real dexterous manipulation.Conference on Robot Learning (CoRL), 2022. 10
2022
-
[30]
T. Chen, M. Tippur, S. Wu, V . Kumar, E. Adelson, and P. Agrawal. Visual dexterity: In- hand reorientation of novel and complex object shapes.Science Robotics, 8(84):eadc9244,
-
[31]
URLhttps://www.science.org/doi/abs/10
doi:10.1126/scirobotics.adc9244. URLhttps://www.science.org/doi/abs/10. 1126/scirobotics.adc9244
-
[32]
H. Qi, B. Yi, S. Suresh, M. Lambeta, Y . Ma, R. Calandra, and J. Malik. General In-Hand Object Rotation with Vision and Touch. InConference on Robot Learning (CoRL), 2023
2023
-
[33]
J. Wang, Y . Yuan, H. Che, H. Qi, Y . Ma, J. Malik, and X. Wang. Lessons from learning to spin “pens”. InCoRL, 2024
2024
-
[34]
Z.-H. Yin, C. Wang, L. Pineda, F. Hogan, C. Bodduluri, A. Sharma, P. Lancaster, I. Prasad, M. Kalakrishnan, J. Malik, M. Lambeta, T. Wu, P. Abbeel, and M. Mukadam. Dexteritygen: Foundation controller for unprecedented dexterity. 06 2025. doi:10.15607/RSS.2025.XXI.103
-
[35]
R. S. Sutton, D. Precup, and S. Singh. Between mdps and semi-mdps: A framework for tem- poral abstraction in reinforcement learning.Artificial intelligence, 112(1-2):181–211, 1999
1999
-
[36]
T. G. Dietterich. Hierarchical reinforcement learning with the maxq value function decompo- sition.Journal of artificial intelligence research, 13:227–303, 2000
2000
-
[37]
A. S. Vezhnevets, S. Osindero, T. Schaul, N. Heess, M. Jaderberg, D. Silver, and K. Kavukcuoglu. FeUdal networks for hierarchical reinforcement learning. In D. Precup and Y . W. Teh, editors,Proceedings of the 34th International Conference on Machine Learning, volume 70 ofProceedings of Machine Learning Research, pages 3540–3549. PMLR, 06–11 Aug 2017. URL...
2017
-
[38]
Nachum, S
O. Nachum, S. S. Gu, H. Lee, and S. Levine. Data-efficient hierarchical reinforcement learning. Advances in neural information processing systems, 31, 2018
2018
-
[39]
Mandlekar, S
A. Mandlekar, S. Nasiriany, B. Wen, I. Akinola, Y . Narang, L. Fan, Y . Zhu, and D. Fox. Mimicgen: A data generation system for scalable robot learning using human demonstrations. In7th Annual Conference on Robot Learning, 2023
2023
- [40]
-
[41]
C. Chi, S. Feng, Y . Du, Z. Xu, E. Cousineau, B. Burchfiel, and S. Song. Diffusion policy: Visuomotor policy learning via action diffusion. InProceedings of Robotics: Science and Systems (RSS), 2023
2023
-
[42]
Y . Ze, G. Zhang, K. Zhang, C. Hu, M. Wang, and H. Xu. 3d diffusion policy: Generalizable visuomotor policy learning via simple 3d representations. InProceedings of Robotics: Science and Systems (RSS), 2024
2024
-
[43]
J. He, D. Li, X. Yu, Z. Qi, W. Zhang, J. Chen, Z. Zhang, Z. Zhang, L. Yi, and H. Wang. Dexvlg: Dexterous vision-language-grasp model at scale. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 14248–14258, 2025
2025
-
[44]
S. Tao, F. Xiang, A. Shukla, Y . Qin, X. Hinrichsen, X. Yuan, C. Bao, X. Lin, Y . Liu, T. kai Chan, Y . Gao, X. Li, T. Mu, N. Xiao, A. Gurha, V . N. Rajesh, Y . W. Choi, Y .-R. Chen, Z. Huang, R. Calandra, R. Chen, S. Luo, and H. Su. Maniskill3: Gpu parallelized robotics simulation and rendering for generalizable embodied ai.Robotics: Science and Systems, 2025
2025
-
[45]
K. Shaw, A. Agarwal, and D. Pathak. Leap hand: Low-cost, efficient, and anthropomorphic hand for robot learning.Robotics: Science and Systems (RSS), 2023
2023
-
[46]
Xiang, Y
F. Xiang, Y . Qin, K. Mo, Y . Xia, H. Zhu, F. Liu, M. Liu, H. Jiang, Y . Yuan, H. Wang, L. Yi, A. X. Chang, L. J. Guibas, and H. Su. SAPIEN: A simulated part-based interactive environ- ment. InThe IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2020. 11
2020
-
[47]
K. Mo, S. Zhu, A. X. Chang, L. Yi, S. Tripathi, L. J. Guibas, and H. Su. PartNet: A large-scale benchmark for fine-grained and hierarchical part-level 3D object understanding. InThe IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 2019
2019
-
[48]
A. X. Chang, T. Funkhouser, L. Guibas, P. Hanrahan, Q. Huang, Z. Li, S. Savarese, M. Savva, S. Song, H. Su, et al. Shapenet: An information-rich 3d model repository.arXiv preprint arXiv:1512.03012, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[49]
C. R. Qi, L. Yi, H. Su, and L. J. Guibas. Pointnet++: Deep hierarchical feature learning on point sets in a metric space.arXiv preprint arXiv:1706.02413, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[50]
D. Sharma, K. Tokas, A. Puri, and K. Sharda. Shadow hand.Journal of Advance Research in Applied Science (ISSN 2208-2352), 1(1):04–07, Jan. 2014. doi:10.53555/nnas.v1i1.692. URL https://nnpub.org/index.php/AS/article/view/692
-
[51]
T. Feix, J. Romero, H.-B. Schmiedmayer, A. M. Dollar, and D. Kragic. The grasp taxonomy of human grasp types.IEEE Transactions on Human-Machine Systems, 46(1):66–77, 2016. doi:10.1109/THMS.2015.2470657
-
[52]
Z. Wei, Z. Xu, J. Guo, Y . Hou, C. Gao, Z. Cai, J. Luo, and L. Shao.D(R,O)grasp: A unified representation of robot and object interaction for cross-embodiment dexterous grasping. In 2025 IEEE International Conference on Robotics and Automation (ICRA), pages 4982–4988,
2025
-
[53]
doi:10.1109/ICRA55743.2025.11127754
-
[54]
Z. Wei, Y . Yao, and M. Ding. One hand to rule them all: Canonical representations for unified dexterous manipulation, 2026. URLhttps://arxiv.org/abs/2602.16712
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[55]
P. Wu, Y . Shentu, Z. Yi, X. Lin, and P. Abbeel. Gello: A general, low-cost, and intuitive teleoperation framework for robot manipulators, 2023
2023
-
[56]
T. Gervet, Z. Xian, N. Gkanatsios, and K. Fragkiadaki. Act3d: 3d feature field transformers for multi-task robotic manipulation.arXiv preprint arXiv:2306.17817, 2023. 12 Appendix Table of Contents A Benchmark Details 13 A.1 Details on Decomposing Tasks into Sub-tasks . . . . . . . . . . . . . . . . . . . 13 A.2 Task Details . . . . . . . . . . . . . . . ....
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.