GABI: Geometry-Aware Boundary Integration for Spacecraft Segmentation
Pith reviewed 2026-06-28 18:38 UTC · model grok-4.3
The pith
Adding a distance-field prediction head to a convolutional backbone improves spacecraft segmentation accuracy and generalization while keeping the model small.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
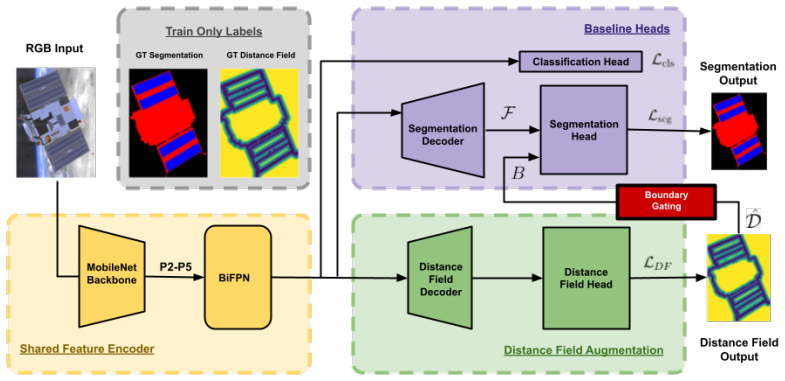
GABI augments a convolutional backbone with an auxiliary distance-field prediction head. The distance field provides dense geometric supervision around object boundaries, encouraging the network to learn spatially consistent representations of spacecraft structures while maintaining low model complexity suitable for onboard perception systems.
What carries the argument
auxiliary distance-field prediction head that supplies dense geometric supervision around boundaries
If this is right
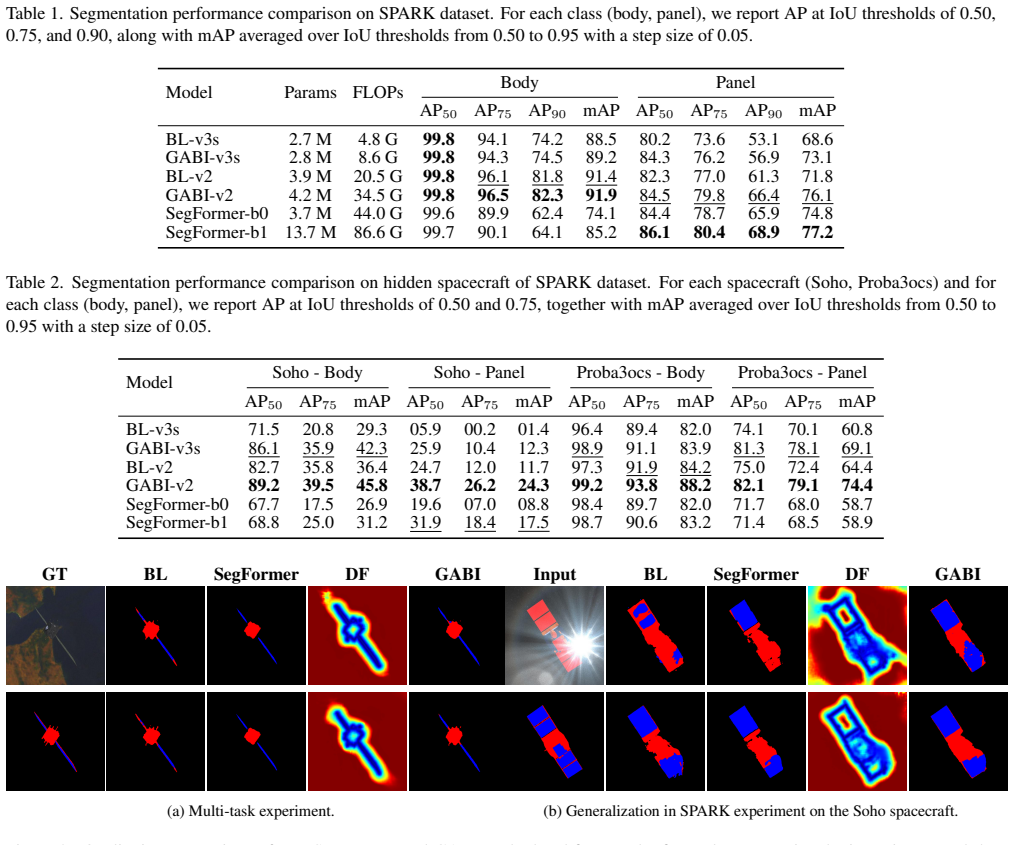
- On the SPARK benchmark distance-field supervision improves the baseline by up to 5% in Average Precision while achieving performance comparable to the transformer models.
- In generalization experiments GABI improves Average Precision by more than 50% over the baseline.
- In cross-domain evaluation the lightweight GABI variant performs within 5% in IoU and F1-score of the heavier transformer model while being approximately ten times smaller.
- The heavier GABI variant surpasses the transformer architectures while remaining nearly three times lighter.
Where Pith is reading between the lines
- The distance-field approach could transfer to other robotic vision settings where boundary cues are degraded by glare or shadow.
- Smaller models enabled by this supervision might allow more spacecraft to perform perception locally rather than streaming raw images.
- If distance fields can be derived from existing CAD models the method might support rapid adaptation to new spacecraft without new labeled images.
Load-bearing premise
The distance field provides dense geometric supervision around object boundaries that encourages spatially consistent representations while maintaining low model complexity.
What would settle it
An ablation that removes only the distance-field head and returns average precision to the level of the plain convolutional baseline on the SPARK test set would falsify the claimed benefit of the geometric supervision.
Figures

read the original abstract
Accurate segmentation is crucial for autonomous spacecraft, as it directly affects downstream tasks related to 3D situational awareness. The harsh illumination conditions of space, however, produce images with high variability in appearance, hindering the generalization of segmentation approaches across different spacecraft and environments. In this work, we propose GABI, a lightweight boundary-aware multi-task segmentation architecture that augments a convolutional backbone with an auxiliary distance-field prediction head. The distance field provides dense geometric supervision around object boundaries, encouraging the network to learn spatially consistent representations of spacecraft structures while maintaining low model complexity suitable for onboard perception systems. We evaluated GABI against both an established convolutional baseline and a heavier transformer-based architecture. On the SPARK benchmark, distance-field supervision improves the baseline by up to $5\%$ in Average Precision while achieving performance comparable to the transformer models. In generalization experiments, GABI improves Average Precision by more than $50\%$ over the baseline. In cross-domain evaluation, the lightweight GABI variant performs within $5\%$ in IoU and F1-score of the heavier transformer model while being approximately ten times smaller. At the same time, the heavier GABI variant surpasses the transformer architectures while remaining nearly three times lighter.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes GABI, a lightweight convolutional multi-task segmentation network augmented with an auxiliary distance-field prediction head. The distance field is intended to supply dense geometric supervision near boundaries, yielding spatially consistent representations. On the SPARK benchmark the method improves a convolutional baseline by up to 5% AP and matches heavier transformer models; in generalization and cross-domain tests the lightweight variant stays within 5% IoU/F1 of transformers while being ~10× smaller, and a heavier GABI variant exceeds the transformers at ~3× lower complexity.
Significance. If the reported gains are shown to arise specifically from the geometric distance-field supervision rather than generic multi-task regularization, and if the experimental protocol is fully documented with statistical controls, the work would supply a practical, low-complexity alternative for onboard spacecraft perception under variable illumination.
major comments (3)
- [Experiments] Experiments section: the central claim that the distance-field head supplies unique geometric supervision is not isolated by any ablation that replaces the distance-field regression with an alternative auxiliary task (binary edge map, simple reconstruction, or even a second segmentation head). Without this control the performance deltas cannot be attributed to geometry rather than the generic benefit of an extra regression loss.
- [Results] Results and evaluation protocol: the headline numbers (5% AP on SPARK, >50% AP in generalization, within-5% cross-domain) are presented without dataset splits, number of random seeds, error bars, or statistical significance tests. This absence directly affects the verifiability of the quantitative claims that support the architecture’s advantage.
- [Method] Architecture description: the multi-task loss weighting between segmentation and distance-field heads is not specified (neither the relative coefficients nor whether they are learned), leaving open whether the reported gains depend on a particular hyper-parameter choice rather than the distance-field representation itself.
minor comments (1)
- [Abstract] The abstract states numerical improvements but supplies no information on dataset splits, statistical testing, baseline implementation details, or error bars; moving a concise experimental protocol summary into the abstract would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below, indicating revisions where appropriate to strengthen the manuscript.
read point-by-point responses
-
Referee: [Experiments] Experiments section: the central claim that the distance-field head supplies unique geometric supervision is not isolated by any ablation that replaces the distance-field regression with an alternative auxiliary task (binary edge map, simple reconstruction, or even a second segmentation head). Without this control the performance deltas cannot be attributed to geometry rather than the generic benefit of an extra regression loss.
Authors: We agree that the current ablations do not fully isolate the geometric contribution of the distance field from generic multi-task benefits. In the revised manuscript we will add controlled experiments replacing the distance-field head with a binary edge-map regression task and with a duplicate segmentation head, using identical loss weighting and training protocol, to quantify the specific benefit of dense geometric supervision near boundaries. revision: yes
-
Referee: [Results] Results and evaluation protocol: the headline numbers (5% AP on SPARK, >50% AP in generalization, within-5% cross-domain) are presented without dataset splits, number of random seeds, error bars, or statistical significance tests. This absence directly affects the verifiability of the quantitative claims that support the architecture’s advantage.
Authors: Dataset splits follow the official SPARK protocol described in Section 4.1; however, we acknowledge the absence of multi-seed statistics. We will rerun all reported experiments with three random seeds, include mean and standard deviation, and add paired statistical significance tests (e.g., Wilcoxon) for the key comparisons in the revised results section and tables. revision: yes
-
Referee: [Method] Architecture description: the multi-task loss weighting between segmentation and distance-field heads is not specified (neither the relative coefficients nor whether they are learned), leaving open whether the reported gains depend on a particular hyper-parameter choice rather than the distance-field representation itself.
Authors: The combined loss uses fixed scalar weights (segmentation: 1.0, distance-field: 0.5) selected via validation-set grid search; the weights are not learned. We will add an explicit statement of these coefficients, the search range, and the final values to the method section and training details in the revision. revision: yes
Circularity Check
No circularity: empirical claims rest on external benchmarks, not self-referential fitting or derivations
full rationale
The paper proposes a multi-task CNN architecture with an auxiliary distance-field head and reports empirical gains on SPARK and generalization/cross-domain tests. No equations, uniqueness theorems, ansatzes, or derivations appear in the provided text. Performance deltas are presented as measured outcomes against baselines and transformers, with no fitted parameters renamed as predictions or self-citations serving as load-bearing premises. The architecture description and results are self-contained against external data splits.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Distance transform regression for spatially-aware deep semantic segmentation.Computer Vi- sion and Image Understanding, 189:102809, 2019
Nicolas Audebert, Alexandre Boulch, Bertrand Le Saux, and S ´ebastien Lef `evre. Distance transform regression for spatially-aware deep semantic segmentation.Computer Vi- sion and Image Understanding, 189:102809, 2019. 3
2019
-
[2]
Segnet: A deep convolutional encoder-decoder architecture for image segmentation.IEEE transactions on pattern anal- ysis and machine intelligence, 39(12):2481–2495, 2017
Vijay Badrinarayanan, Alex Kendall, and Roberto Cipolla. Segnet: A deep convolutional encoder-decoder architecture for image segmentation.IEEE transactions on pattern anal- ysis and machine intelligence, 39(12):2481–2495, 2017. 2
2017
-
[3]
Spacecraft-ds: A spacecraft dataset for key components de- tection and segmentation via hardware-in-the-loop capture
Yi Cao, Jinzhen Mu, Xianghong Cheng, and Fengyu Liu. Spacecraft-ds: A spacecraft dataset for key components de- tection and segmentation via hardware-in-the-loop capture. IEEE Sensors Journal, 24(4):5347–5358, 2024. 3
2024
-
[4]
Aerial image semantic segmentation using dcnn predicted distance maps.ISPRS Journal of Photogrammetry and Re- mote Sensing, 161:309–322, 2020
Dengfeng Chai, Shawn Newsam, and Jingfeng Huang. Aerial image semantic segmentation using dcnn predicted distance maps.ISPRS Journal of Photogrammetry and Re- mote Sensing, 161:309–322, 2020. 3
2020
-
[5]
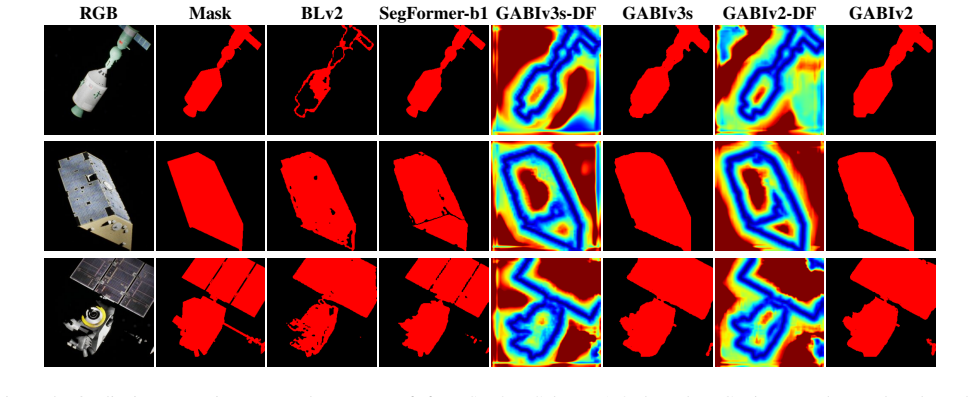
Deeplab: Semantic image RGB Mask BLv2 SegFormer-b1 GABIv3s-DF GABIv3s GABIv2-DF GABIv2 Figure 4
Liang-Chieh Chen, George Papandreou, Iasonas Kokkinos, Kevin Murphy, and Alan L Yuille. Deeplab: Semantic image RGB Mask BLv2 SegFormer-b1 GABIv3s-DF GABIv3s GABIv2-DF GABIv2 Figure 4. Qualitative comparison across three spacecraft from SPE3R. Columns 1–2 show the RGB inputs and ground truth masks. Columns 3–4 represent the predictions of BL-v2 and SegFor...
2017
-
[6]
Semeda: Enhancing segmentation precision with semantic edge aware loss.Pattern Recognition, 108:107557, 2020
Yifu Chen, Arnaud Dapogny, and Matthieu Cord. Semeda: Enhancing segmentation precision with semantic edge aware loss.Pattern Recognition, 108:107557, 2020. 2
2020
-
[7]
Extension of the esa tool for tracking the health of the envi- ronment and missions in space
Camilla Colombo, Martina Rusconi, Juan Luis Gonzalo, Wiebke Retagne, Andrea Muciaccia, FJ Simarro Mecinas, Diego Ramirez, Francesca Letizia, and Emma Stevenson. Extension of the esa tool for tracking the health of the envi- ronment and missions in space. In9th European Conference on Space Debris, Bonn, Germany, pages 1–4, 2025. 1
2025
-
[8]
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
Alexey Dosovitskiy, Lucas Beyer, Alexander Kolesnikov, Dirk Weissenborn, Xiaohua Zhai, Thomas Unterthiner, Mostafa Dehghani, Matthias Minderer, Georg Heigold, Syl- vain Gelly, et al. An image is worth 16x16 words: Trans- formers for image recognition at scale.arXiv preprint arXiv:2010.11929, 2020. 6
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[9]
A spacecraft dataset for detection, segmentation and parts recognition
Hoang Anh Dung, Bo Chen, and Tat-Jun Chin. A spacecraft dataset for detection, segmentation and parts recognition. In Proceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition, pages 2012–2019, 2021. 3
2012
-
[10]
Pose estimation of an uncooperative spacecraft from actual space imagery.International Journal of Space Science and Engineering 5, 2(2):171–189, 2014
Simone D’Amico, Mathias Benn, and John L Jørgensen. Pose estimation of an uncooperative spacecraft from actual space imagery.International Journal of Space Science and Engineering 5, 2(2):171–189, 2014. 1
2014
-
[11]
Convit: Improv- ing vision transformers with soft convolutional inductive bi- ases
St ´ephane d’Ascoli, Hugo Touvron, Matthew L Leavitt, Ari S Morcos, Giulio Biroli, and Levent Sagun. Convit: Improv- ing vision transformers with soft convolutional inductive bi- ases. InInternational conference on machine learning, pages 2286–2296. PMLR, 2021. 6
2021
-
[12]
ESA space environment report
European Space Agency. ESA space environment report
-
[13]
Technical report, European Space Agency, 2025. 1
2025
-
[14]
Instance segmentation for feature recognition on noncooper- ative resident space objects.Journal of Spacecraft and Rock- ets, 59(6):2160–2174, 2022
Niccol `o Faraco, Michele Maestrini, and Pierluigi Di Lizia. Instance segmentation for feature recognition on noncooper- ative resident space objects.Journal of Spacecraft and Rock- ets, 59(6):2160–2174, 2022. 1
2022
-
[15]
Boundary-aware instance segmentation
Zeeshan Hayder, Xuming He, and Mathieu Salzmann. Boundary-aware instance segmentation. InProceedings of the IEEE conference on computer vision and pattern recog- nition, pages 5696–5704, 2017. 3
2017
-
[16]
Deep residual learning for image recognition
Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Deep residual learning for image recognition. InProceed- ings of the IEEE conference on computer vision and pattern recognition, pages 770–778, 2016. 2
2016
-
[17]
Mask r-cnn
Kaiming He, Georgia Gkioxari, Piotr Doll ´ar, and Ross Gir- shick. Mask r-cnn. InProceedings of the IEEE international conference on computer vision, pages 2961–2969, 2017. 2
2017
-
[18]
Mask r-cnn
Kaiming He, Georgia Gkioxari, Piotr Doll ´ar, and Ross Gir- shick. Mask r-cnn. InProceedings of the IEEE international conference on computer vision, pages 2961–2969, 2017. 3
2017
-
[19]
MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications
Andrew G Howard, Menglong Zhu, Bo Chen, Dmitry Kalenichenko, Weijun Wang, Tobias Weyand, Marco An- dreetto, and Hartwig Adam. Mobilenets: Efficient convolu- tional neural networks for mobile vision applications.arXiv preprint arXiv:1704.04861, 2017. 2, 4
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[20]
Wdicd: A novel simulated dataset and structure-aware framework for semantic segmentation of spacecraft component.Acta Astronautica, 225:1–15, 2024
Kun Huang, Yan Zhang, Feifan Ma, Jintao Chen, Zhuang- bin Tan, and Yuanjie Qi. Wdicd: A novel simulated dataset and structure-aware framework for semantic segmentation of spacecraft component.Acta Astronautica, 225:1–15, 2024. 3
2024
-
[21]
Ultralytics yolov11, 2024
Glenn Jocher and Jing Qiu. Ultralytics yolov11, 2024. 3
2024
-
[22]
Ultralytics yolov8, 2023
Glenn Jocher, Ayush Chaurasia, and Jing Qiu. Ultralytics yolov8, 2023. 3
2023
-
[23]
Antoine Legrand, Renaud Detry, and Christophe De Vleeschouwer. Nerf-based visualization of 3d cues supporting data-driven spacecraft pose estimation.arXiv preprint arXiv:2509.14890, 2025. 2
-
[24]
Fully convolutional networks for semantic segmentation
Jonathan Long, Evan Shelhamer, and Trevor Darrell. Fully convolutional networks for semantic segmentation. InPro- ceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2015. 2
2015
-
[25]
Espnet: Efficient spatial pyramid of dilated convolutions for semantic segmentation
Sachin Mehta, Mohammad Rastegari, Anat Caspi, Linda Shapiro, and Hannaneh Hajishirzi. Espnet: Efficient spatial pyramid of dilated convolutions for semantic segmentation. InProceedings of the european conference on computer vi- sion (ECCV), pages 552–568, 2018. 2
2018
-
[26]
Park and Simone D’Amico
Taehyun H. Park and Simone D’Amico. Spe3r: Synthetic dataset for satellite pose estimation and 3d reconstruction,
-
[27]
Robust multi-task learn- ing and online refinement for spacecraft pose estimation across domain gap.Advances in Space Research, 73(11): 5726–5740, 2024
Tae Ha Park and Simone D’Amico. Robust multi-task learn- ing and online refinement for spacecraft pose estimation across domain gap.Advances in Space Research, 73(11): 5726–5740, 2024. 3
2024
-
[29]
Tae Ha Park, Sumant Sharma, and Simone D’Amico. To- wards robust learning-based pose estimation of noncoopera- tive spacecraft.arXiv preprint arXiv:1909.00392, 2019. 1
-
[30]
ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation
Adam Paszke, Abhishek Chaurasia, Sangpil Kim, and Eu- genio Culurciello. Enet: A deep neural network architec- ture for real-time semantic segmentation.arXiv preprint arXiv:1606.02147, 2016. 2
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[31]
A sur- vey on deep learning-based monocular spacecraft pose esti- mation: Current state, limitations and prospects.Acta Astro- nautica, 212:339–360, 2023
Leo Pauly, Wassim Rharbaoui, Carl Shneider, Arunkumar Rathinam, Vincent Gaudilliere, and Djamila Aouada. A sur- vey on deep learning-based monocular spacecraft pose esti- mation: Current state, limitations and prospects.Acta Astro- nautica, 212:339–360, 2023. 1
2023
-
[32]
Fast-SCNN: Fast Semantic Segmentation Network
Rudra PK Poudel, Stephan Liwicki, and Roberto Cipolla. Fast-scnn: Fast semantic segmentation network.arXiv preprint arXiv:1902.04502, 2019. 2
work page internal anchor Pith review Pith/arXiv arXiv 1902
-
[33]
U- net: Convolutional networks for biomedical image segmen- tation
Olaf Ronneberger, Philipp Fischer, and Thomas Brox. U- net: Convolutional networks for biomedical image segmen- tation. InInternational Conference on Medical image com- puting and computer-assisted intervention, pages 234–241. Springer, 2015. 2
2015
-
[34]
Jeffrey Joan Sam, Janhavi Sathe, Nikhil Chigali, Naman Gupta, Radhey Ruparel, Yicheng Jiang, Janmajay Singh, James W Berck, and Arko Barman. A new dataset and performance benchmark for real-time spacecraft seg- mentation in onboard flight computers.arXiv preprint arXiv:2507.10775, 2025. 3
-
[35]
Gated-scnn: Gated shape cnns for semantic segmen- tation
Towaki Takikawa, David Acuna, Varun Jampani, and Sanja Fidler. Gated-scnn: Gated shape cnns for semantic segmen- tation. InProceedings of the IEEE/CVF international con- ference on computer vision, pages 5229–5238, 2019. 2, 4
2019
-
[36]
Efficientnet: Rethinking model scaling for convolutional neural networks
Mingxing Tan and Quoc Le. Efficientnet: Rethinking model scaling for convolutional neural networks. InInternational conference on machine learning, pages 6105–6114. PMLR,
-
[37]
Efficientdet: Scalable and efficient object detection
Mingxing Tan, Ruoming Pang, and Quoc V Le. Efficientdet: Scalable and efficient object detection. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 10781–10790, 2020. 4
2020
-
[38]
Irolsd: Illumination robust line segment detection for spacecraft rel- ative navigation.Acta Astronautica, 2025
Iason Georgios Velentzas and Panagiotis Tsiotras. Irolsd: Illumination robust line segment detection for spacecraft rel- ative navigation.Acta Astronautica, 2025. 3
2025
-
[39]
Segformer: Simple and efficient design for semantic segmentation with transform- ers.Advances in neural information processing systems, 34: 12077–12090, 2021
Enze Xie, Wenhai Wang, Zhiding Yu, Anima Anandkumar, Jose M Alvarez, and Ping Luo. Segformer: Simple and efficient design for semantic segmentation with transform- ers.Advances in neural information processing systems, 34: 12077–12090, 2021. 2, 6, 7
2021
-
[40]
Learning attraction field represen- tation for robust line segment detection
Nan Xue, Song Bai, Fudong Wang, Gui-Song Xia, Tianfu Wu, and Liangpei Zhang. Learning attraction field represen- tation for robust line segment detection. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019. 3, 4
2019
-
[41]
Segfix: Model-agnostic boundary refinement for segmen- tation
Yuhui Yuan, Jingyi Xie, Xilin Chen, and Jingdong Wang. Segfix: Model-agnostic boundary refinement for segmen- tation. InEuropean conference on computer vision, pages 489–506. Springer, 2020. 3
2020
-
[42]
Cooperative relative navi- gation for space rendezvous and proximity operations using controlled active vision.Journal of field robotics, 33(2):205– 228, 2016
Guangcong Zhang, Michail Kontitsis, Nuno Filipe, Panagio- tis Tsiotras, and Patricio A Vela. Cooperative relative navi- gation for space rendezvous and proximity operations using controlled active vision.Journal of field robotics, 33(2):205– 228, 2016. 1
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.