ARTOO-DARTU: Studying AR-HRC With AR Obstruction Mitigation During a Warehouse Task
Pith reviewed 2026-06-25 21:49 UTC · model grok-4.3
The pith
AR situated analytics improve warehouse HRC efficiency by 46% only when paired with obstruction mitigation to preserve real-world visibility.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
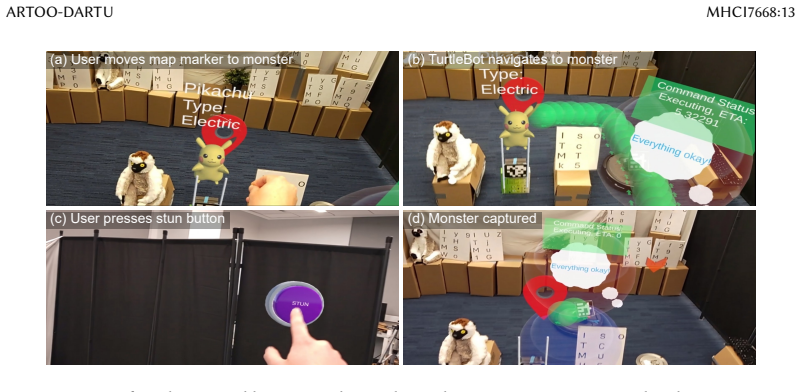
The central claim is that the ARTOO-DARTU system, equipped with its obstruction detection and mitigation pipeline, allows AR situated analytics to significantly enhance efficiency and user experience in AR-HRC warehouse scenarios by preventing obstructions to real-world visibility, as shown by the 46% increase in overall task efficiency and 61% faster subtasks when the pipeline is active compared to when it is not.
What carries the argument
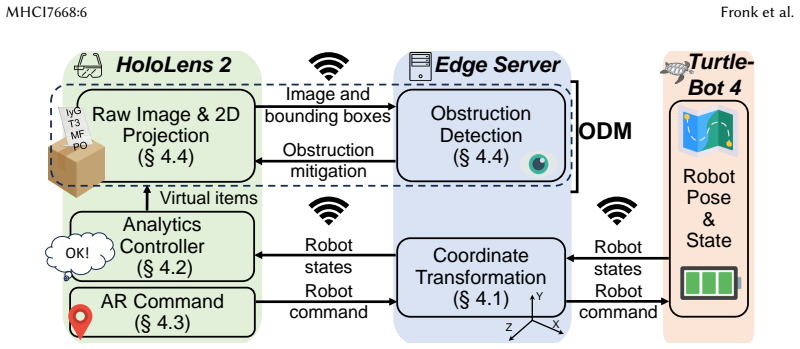
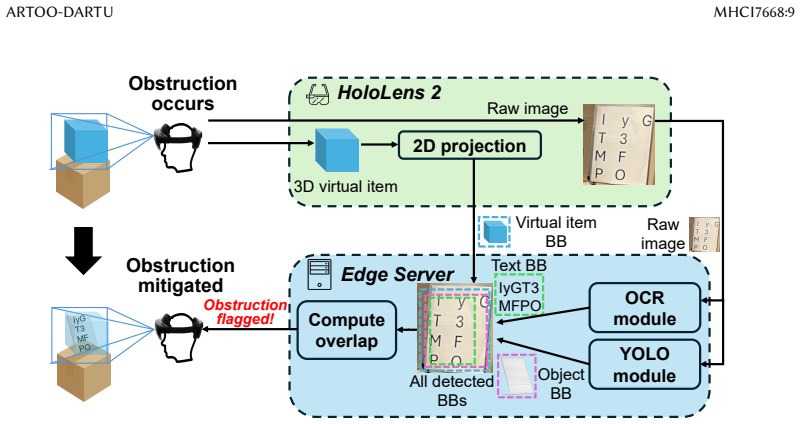
The obstruction detection and mitigation (ODM) pipeline, which identifies and reduces AR content that would otherwise obstruct real-world elements during mobile robot movements.
If this is right
- When the ODM is active, AR situated analytics increase overall HRC task efficiency by 46%.
- Participants are 61% faster on subtasks that require visibility of the real world when using the ODM.
- The system enables real-time robot situated analytics and control without posing safety risks from visual obstructions.
- AR content can be dynamically positioned relative to robot movements while maintaining usability.
Where Pith is reading between the lines
- Similar mitigation techniques could extend to other mobile robot environments where AR overlays risk hiding physical hazards.
- Real warehouse deployments might show different gains if the gamified elements are replaced with actual inventory items.
- The results suggest that future AR-HRC designs should prioritize visibility preservation as a core requirement rather than an add-on.
Load-bearing premise
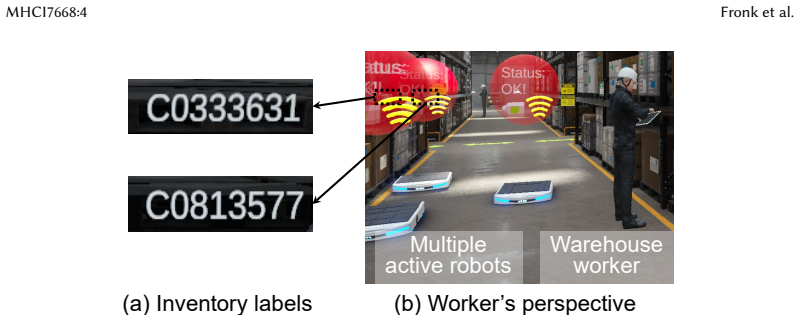
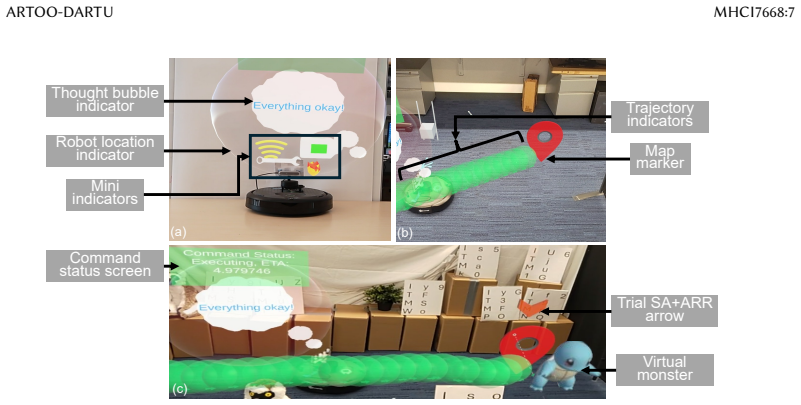
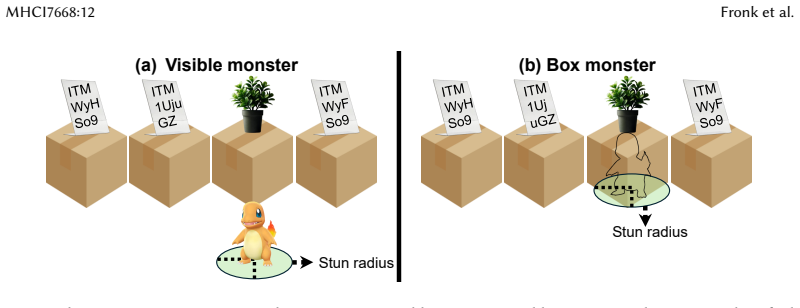
The gamified Pocket MonstARs task with virtual monsters and labeled boxes accurately reflects the real-world identification and visibility requirements of warehouse inventory picking with mobile robots.
What would settle it
A study measuring task completion times and error rates in an actual warehouse setting with physical boxes and moving robots, comparing conditions with and without the obstruction mitigation.
Figures


read the original abstract
Human-robot collaboration (HRC) often requires robot intentions and internal states to be conveyed to users for task efficiency and safety. Recently, augmented reality (AR) situated analytics provide such real-time robot feedback in HRC contexts. However, AR situated analytics can obstruct important real-world elements, posing safety and usability risks, especially when content is dynamically positioned relative to movements of mobile robots in a warehouse HRC scenario. In this paper, we introduce the Augmented Reality Technique Of Obstruction Deterrence while Aiding Robotic Teaming for Users (ARTOO-DARTU), an AR system tailored specifically for warehouse HRC that enables real-time robot situated analytics and control while preserving visibility of the real world through an obstruction detection and mitigation pipeline (ODM) that is uniquely suited for AR-HRC. To evaluate ARTOO-DARTU, we developed Pocket MonstARs, a controlled gamified abstraction of HRC warehouse inventory picking in which virtual monsters serve as proxies for pick targets, while labeled and object-marked boxes preserve the real-world identification demands of the picking task. In a 34-participant user study, we found that our designed AR situated analytics yielded a 46% increase in efficiency on the overall HRC task, but only when the ODM was active. Participants with the ODM active were also 61% faster on subtasks requiring visibility of the real world. Our findings demonstrate that, when paired with our developed ODM to prevent real-world obstructions, the situated analytics in ARTOO-DARTU can significantly enhance efficiency and user experience in AR-HRC warehouse scenarios.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces ARTOO-DARTU, an AR system for warehouse human-robot collaboration (HRC) featuring a tailored obstruction detection and mitigation (ODM) pipeline that enables real-time situated robot analytics while preserving visibility of the real world. Evaluation uses the Pocket MonstARs gamified task (virtual monsters as pick targets, labeled boxes for identification) in a 34-participant study, reporting a 46% efficiency increase on the overall HRC task and 61% faster performance on visibility-requiring subtasks, but only when ODM is active.
Significance. If the results hold, the work demonstrates the practical importance of obstruction mitigation for safe and efficient AR-HRC in dynamic settings with mobile robots. The specialized ODM pipeline is a clear engineering contribution, and the controlled gamified evaluation enables direct condition comparisons. The quantitative claims, if supported by appropriate statistics and design details, provide evidence that pairing situated analytics with ODM can improve user performance.
major comments (1)
- [§4] §4 (User Study and Task Design): The 46% overall efficiency gain and 61% subtask speedup are reported only with ODM active, but these rest on the assumption that the Pocket MonstARs task (virtual monsters as proxies for pick targets plus labeled boxes) reproduces the visibility and identification demands of real warehouse inventory picking. Real scenarios involve variable physical occlusions, lighting changes, and unpredictable robot trajectories that the controlled abstraction may not replicate; if the ODM benefit is an artifact of this simplification, the conditional claim does not transfer. This is load-bearing for the central applicability argument.
minor comments (2)
- [Abstract] Abstract: The quantitative percentages are stated without reference to the accompanying statistical tests, sample sizes per condition, or error measures; while the body likely contains these, the abstract should at minimum indicate that results are statistically supported.
- [Figures] Figure captions (e.g., system overview figures): Ensure all pipeline stages in the ODM description are explicitly labeled so readers can trace the obstruction detection logic without cross-referencing the text.
Simulated Author's Rebuttal
We thank the referee for their thoughtful review and constructive feedback on the applicability of our controlled evaluation. We address the single major comment below.
read point-by-point responses
-
Referee: [§4] §4 (User Study and Task Design): The 46% overall efficiency gain and 61% subtask speedup are reported only with ODM active, but these rest on the assumption that the Pocket MonstARs task (virtual monsters as proxies for pick targets plus labeled boxes) reproduces the visibility and identification demands of real warehouse inventory picking. Real scenarios involve variable physical occlusions, lighting changes, and unpredictable robot trajectories that the controlled abstraction may not replicate; if the ODM benefit is an artifact of this simplification, the conditional claim does not transfer. This is load-bearing for the central applicability argument.
Authors: We appreciate the referee's concern about ecological validity. The Pocket MonstARs task was deliberately constructed as a controlled gamified abstraction to isolate the precise visibility and identification demands that ODM is designed to protect. Virtual monsters serve as proxies for pick targets while the labeled and object-marked physical boxes directly preserve the real-world identification requirements of inventory picking; this design choice allows us to measure ODM's effect on subtasks that require unobstructed real-world visibility. Such abstractions are standard in HCI for rigorously comparing interface conditions before field deployment. We do not claim that the 46% and 61% gains will transfer unchanged to every real warehouse; our claims are scoped to the controlled setting in which ODM demonstrably mitigates the obstruction problem introduced by situated AR analytics. We will add a dedicated paragraph in the Discussion section that (a) explicitly states the rationale for the task elements and (b) acknowledges the additional real-world variables (lighting, unpredictable trajectories) not present in the study, thereby clarifying the boundary of the applicability argument without altering any results or claims. revision: partial
Circularity Check
No circularity: empirical user study with no derivations or fitted parameters
full rationale
The paper describes an AR system (ARTOO-DARTU) and reports results from a 34-participant controlled user study on a gamified task (Pocket MonstARs). No equations, derivations, parameters, or predictive models are present in the provided text or abstract. The efficiency claims (46% overall, 61% on visibility subtasks) are direct empirical measurements, not outputs of any fitted or self-referential construction. The ODM pipeline is a described implementation, not a mathematical reduction. Self-citations, if any, are not load-bearing for any derivation. This matches the default case of a self-contained empirical study with no opportunity for the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Kaveh Azadeh, M. B. M. René de Koster, and Debjit Roy. 2017. Robotized and Automated Warehouse Systems: Review and Recent Developments.SSRN Electronic Journal(2017)
2017
-
[2]
Blaine Bell, Steven Feiner, and Tobias Höllerer. 2001. View Management for Virtual and Augmented Reality. InProc. ACM UIST
2001
-
[3]
John Brooke. 1995. SUS: A Quick and Dirty Usability Scale.Usability Eval. Ind.(11 1995)
1995
-
[4]
Chan, Geoffrey Hanks, Maram Sakr, Haomiao Zhang, Tiger Zuo, H
Wesley P. Chan, Geoffrey Hanks, Maram Sakr, Haomiao Zhang, Tiger Zuo, H. F. Machiel van der Loos, and Elizabeth Croft. 2022. Design and Evaluation of an Augmented Reality Head-mounted Display Interface for Human Robot Teams Collaborating in Physically Shared Manufacturing Tasks.J. Hum.-Robot Interact.(2022)
2022
-
[5]
Kishan Chandan, Vidisha Kudalkar, Xiang Li, and Shiqi Zhang. 2021. ARROCH: Augmented Reality for Robots Collaborating with a Human. InProc. IEEE ICRA
2021
-
[6]
Linfeng Chen, Kazuki Takashima, Kazuyuki Fujita, and Yoshifumi Kitamura. 2021. PinpointFly: An Egocentric Position-control Drone Interface using Mobile AR. InProc. ACM CHI
2021
-
[7]
Tian, Tadayoshi Kohno, and Franziska Roesner
Kaiming Cheng, Jeffery F. Tian, Tadayoshi Kohno, and Franziska Roesner. 2023. Exploring User Reactions and Mental Models Towards Perceptual Manipulation Attacks in Mixed Reality. InProc. USENIX Security
2023
-
[8]
Shakiba Davari, Feiyu Lu, and Doug A. Bowman. 2020. Occlusion Management Techniques for Everyday Glanceable AR Interfaces. InProc. IEEE VRW
2020
-
[9]
Shakiba Davari, Feiyu Lu, and Doug A. Bowman. 2022. Validating the Benefits of Glanceable and Context-Aware Augmented Reality for Everyday Information Access Tasks. InProc. IEEE VR
2022
-
[10]
Philipp Fleck, Aimée Sousa Calepso, Sebastian Hubenschmid, Michael Sedlmair, and Dieter Schmalstieg. 2023. RagRug: A Toolkit for Situated Analytics.IEEE TVCG(2023)
2023
-
[11]
Gay-Bellile, P
V. Gay-Bellile, P. Lothe, S. Bourgeois, E. Royer, and S. Naudet Collette. 2010. Augmented Reality in Large Environments: Application to Aided Navigation in Urban Context. InProc. IEEE ISMAR
2010
-
[12]
Raphaël Grasset, Tobias Langlotz, Denis Kalkofen, Markus Tatzgern, and Dieter Schmalstieg. 2012. Image-driven View Management for Augmented Reality Browsers. InProc. IEEE ISMAR
2012
-
[13]
Erico Guizzo. 2008. Three Engineers, Hundreds of Robots, One Warehouse.IEEE Spectrum(2008)
2008
-
[14]
Hooman Hedayati, Michael Walker, and Daniel Szafir. 2018. Improving Collocated Robot Teleoperation with Augmented Reality. InProc. ACM HRI
2018
-
[15]
Sebastian Hubenschmid, Jonathan Wieland, Daniel Immanuel Fink, Andrea Batch, Johannes Zagermann, Niklas Elmqvist, and Harald Reiterer. 2022. ReLive: Bridging In-Situ and Ex-Situ Visual Analytics for Analyzing Mixed Reality User Studies. InProc. ACM CHI. https://doi.org/10.1145/3491102.3517550
-
[16]
Bryce Ikeda and Daniel Szafir. 2024. PRogramAR: Augmented Reality End-User Robot Programming.J. Hum.-Robot Interact.(2024)
2024
-
[17]
Rafia Inam, Klaus Raizer, Alberto Hata, Ricardo Souza, Elena Forsman, Enyu Cao, and Shaolei Wang. 2018. Risk Assessment for Human-Robot Collaboration in an Automated Warehouse Scenario. InProc. IEEE ETFA
2018
-
[18]
Sarah Isherwood. 2009. Graphics and Semantics: The Relationship between What Is Seen and What Is Meant in Icon Design. InEngineering Psychology and Cognitive Ergonomics. Springer
2009
-
[19]
Jaided AI et al. [n. d.]. EasyOCR. https://github.com/JaidedAI/EasyOCR
-
[20]
Glenn Jocher et al. 2022. ultralytics/yolov5: v7.0 – YOLOv5 SOTA Realtime Instance Segmentation. Proc. ACM Hum.-Comput. Interact., Vol. 10, No. 5, Article MHCI7668. Publication date: August 2026. ARTOO-DARTU MHCI7668:21
2022
-
[21]
Jim Lawrence, Javier Bernal, and Christoph Witzgall. 2019. A Purely Algebraic Justification of the Kabsch-Umeyama Algorithm.Journal of Research of the National Institute of Standards and Technology(2019)
2019
-
[22]
Kiron Lebeck, Kimberly Ruth, Tadayoshi Kohno, and Franziska Roesner. 2017. Securing Augmented Reality Output. In Proc. IEEE SP
2017
-
[23]
Weizhou Luo, Zhongyuan Yu, Rufat Rzayev, Marc Satkowski, Stefan Gumhold, Matthew McGinity, and Raimund Dachselt. 2023. Pearl: Physical Environment based Augmented Reality Lenses for In-Situ Human Movement Analysis. InProc. ACM CHI
2023
-
[24]
Stefan Maass and Jürgen Döllner. 2006. Efficient View Management for Dynamic Annotation Placement in Virtual Landscapes. InSmart Graphics
2006
-
[25]
Simone Macciò, Alessandro Carfì, and Fulvio Mastrogiovanni. 2022. Mixed Reality as Communication Medium for Human-Robot Collaboration. InProc. IEEE ICRA
2022
-
[26]
Steven Macenski, Tully Foote, Brian Gerkey, Chris Lalancette, and William Woodall. 2022. Robot Operating System 2: Design, architecture, and uses in the wild.Science Robotics(2022)
2022
-
[27]
Microsoft. 2024. Mixed Reality Toolkit 3. https://github.com/MixedRealityToolkit/MixedRealityToolkit- Unity?tab=readme-ov-file
2024
-
[28]
1990.Operators’ Trust in and Use of Automatic Controllers in a Supervisory Process Control Task
Bonnie Marlene Muir. 1990.Operators’ Trust in and Use of Automatic Controllers in a Supervisory Process Control Task. University of Toronto
1990
-
[29]
Occupational Safety and Health Administration (OSHA). 2023. Establishment-Specific Injury and Illness Data
2023
-
[30]
Koichi Owaki, Nattaon Techasarntikul, and Hideyuki Shimonishi. 2023. Human Behavior Analysis in Human-Robot Cooperation with AR Glasses. InProc. IEEE ISMAR
2023
-
[31]
Frieder Pankratz, Andreas Dippon, Tayfur Coskun, and Gudrun Klinker. 2013. User Awareness of Tracking Uncertainties in AR Navigation Scenarios. InProc. IEEE ISMAR
2013
-
[32]
Hannah Pelikan and Emily Hofstetter. 2023. Managing Delays in Human-Robot Interaction.Proc. ACM CHI(2023)
2023
-
[33]
Poels, Y.A.W
K. Poels, Y.A.W. de Kort, and W.A. IJsselsteijn. 2007.D3.3 : Game Experience Questionnaire: Development of a Self-Report Measure to Assess the Psychological Impact of Digital Games. Technische Universiteit Eindhoven
2007
-
[34]
Shuwen Qiu, Hangxin Liu, Zeyu Zhang, Yixin Zhu, and Song-Chun Zhu. 2020. Human-Robot Interaction in a Shared Augmented Reality Workspace. InProc. IEEE/RSJ IROS
2020
-
[35]
Sebastian Ramirez. [n. d.]. FastAPI. https://fastapi.tiangolo.com
-
[36]
Maha Sajid, Syed Ibrahim Mustafa Shah Bukhari, Bo Ji, and Brendan David-John. 2025. Just Stop Doing Everything for Now!: Understanding Security Attacks in Remote Collaborative Mixed Reality
2025
-
[37]
Marc Satkowski, Rufat Rzayev, Eva Goebel, and Raimund Dachselt. 2022. ABOVE & BELOW: Investigating Ceiling and Floor for Augmented Reality Content Placement. InProc. IEEE ISMAR
2022
-
[38]
Tim Scargill, Ying Chen, Tianyi Hu, and Maria Gorlatova. 2023. SiTAR: Situated Trajectory Analysis for In-the-Wild Pose Error Estimation. InProc. IEEE ISMAR
2023
-
[39]
Manisah Mohd Shah, Haslina Arshad, and Riza Sulaiman. 2012. Occlusion in Augmented Reality. InProc. IEEE ICIDT
2012
-
[40]
Shubham Sonawani, Yifan Zhou, and Heni Ben Amor. 2023. Projecting Robot Intentions Through Visual Cues: Static vs. Dynamic Signaling. InProc. IEEE/RSJ IROS
2023
-
[41]
Tianyu Song, Felix Pabst, Ulrich Eck, and Nassir Navab. 2025. Enhancing Patient Acceptance of Robotic Ultrasound through Conversational Virtual Agent and Immersive Visualizations.IEEE TVCG(2025)
2025
-
[42]
Unity Technologies. 2025. NavMesh. https://docs.unity3d.com/6000.0/Documentation/ScriptReference/AI.NavMesh.h tml
2025
-
[43]
Unity Technologies Japan. 2024. Unity Warehouse. https://assetstore.unity.com/packages/3d/environments/industrial /unity-warehouse-276394
2024
-
[44]
Walker, Hooman Hedayati, and Daniel Szafir
Michael E. Walker, Hooman Hedayati, and Daniel Szafir. 2019. Robot Teleoperation with Augmented Reality Virtual Surrogates. InProc. ACM HRI
2019
-
[45]
Sean White and Steven Feiner. 2009. SiteLens: Situated Visualization Techniques for Urban Site Visits. InProc. SIGCHI Human Factors in Computing Systems
2009
-
[46]
Yanming Xiu, Tim Scargill, and Maria Gorlatova. 2025. ViDDAR: Vision Language Model-Based Task-Detrimental Content Detection for Augmented Reality.IEEE TVCG(2025)
2025
-
[47]
Vicky Zhang, Alexander Albers, Christine Saeedi-Givi, Per Ola Kristensson, Thomas Bohné, and Sławomir Tadeja
-
[48]
Should I Evaluate My Augmented Reality System in an Industrial Environment? Investigating the Effects of Classroom and Shop Floor Settings on Guided Assembly.IEEE TVCG(2024)
2024
-
[49]
Yu Zhao, Jeanine Stefanucci, Sarah Creem-Regehr, and Bobby Bodenheimer. 2023. Evaluating Augmented Reality Landmark Cues and Frame of Reference Displays with Virtual Reality.IEEE TDSC(2023). Proc. ACM Hum.-Comput. Interact., Vol. 10, No. 5, Article MHCI7668. Publication date: August 2026
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.