Sensor2Sensor: Cross-Embodiment Sensor Conversion for Autonomous Driving
Pith reviewed 2026-06-30 16:37 UTC · model grok-4.3
The pith
A diffusion model translates monocular dashcam videos into multi-view camera images and LiDAR point clouds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
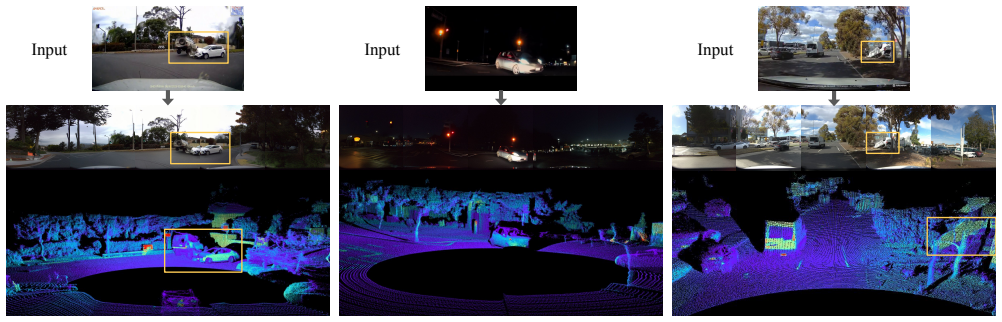
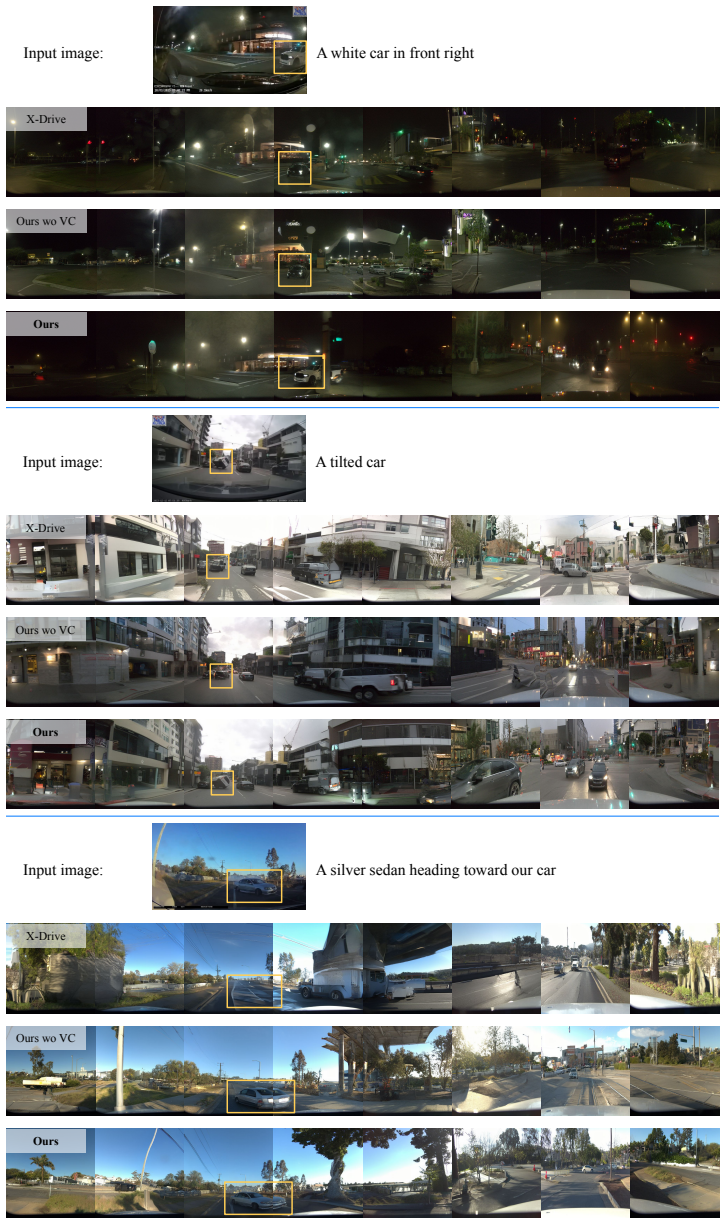
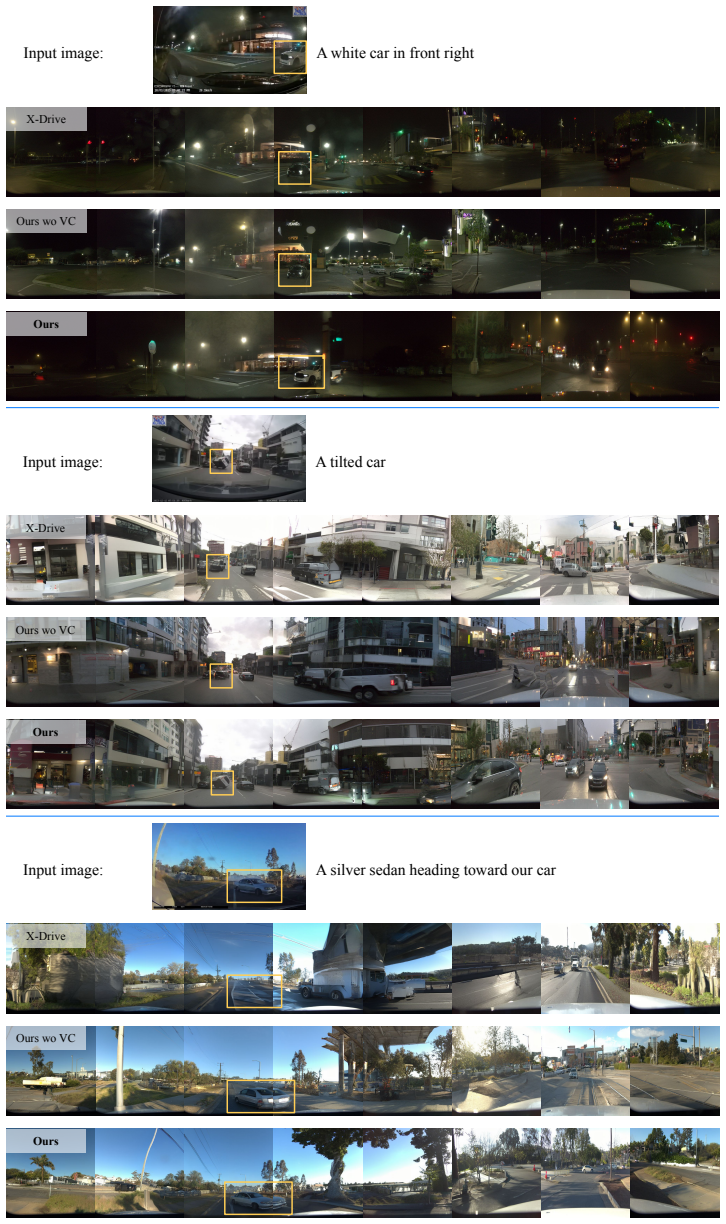
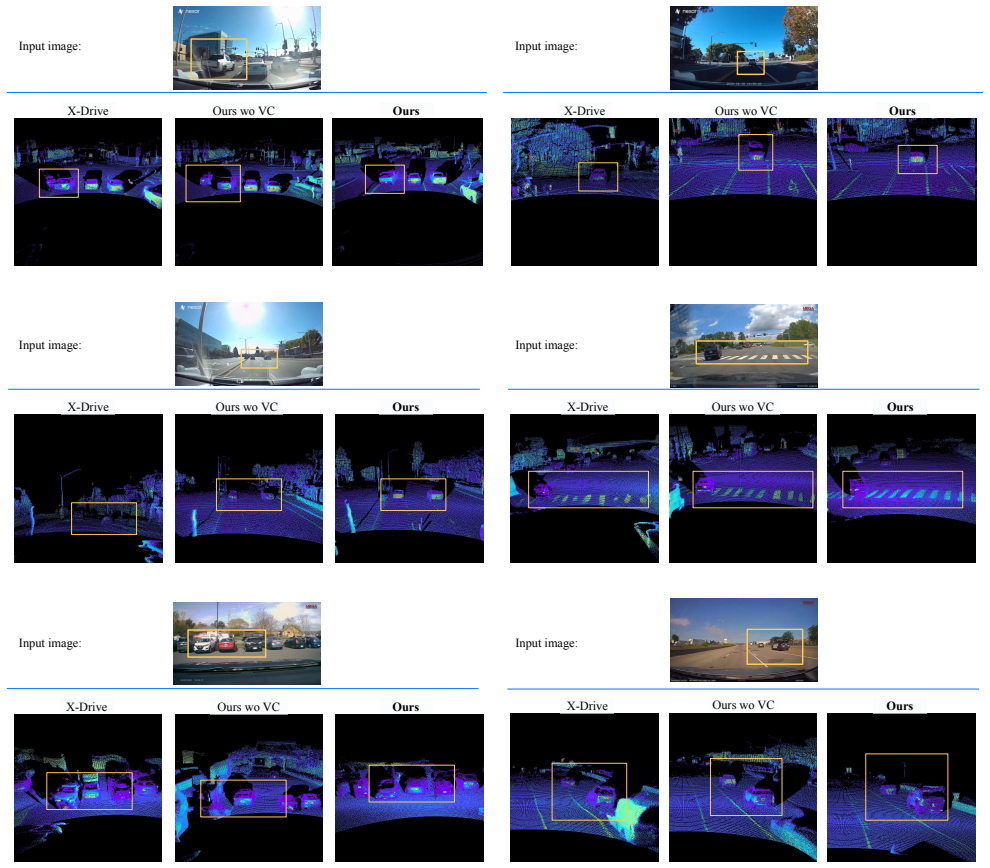
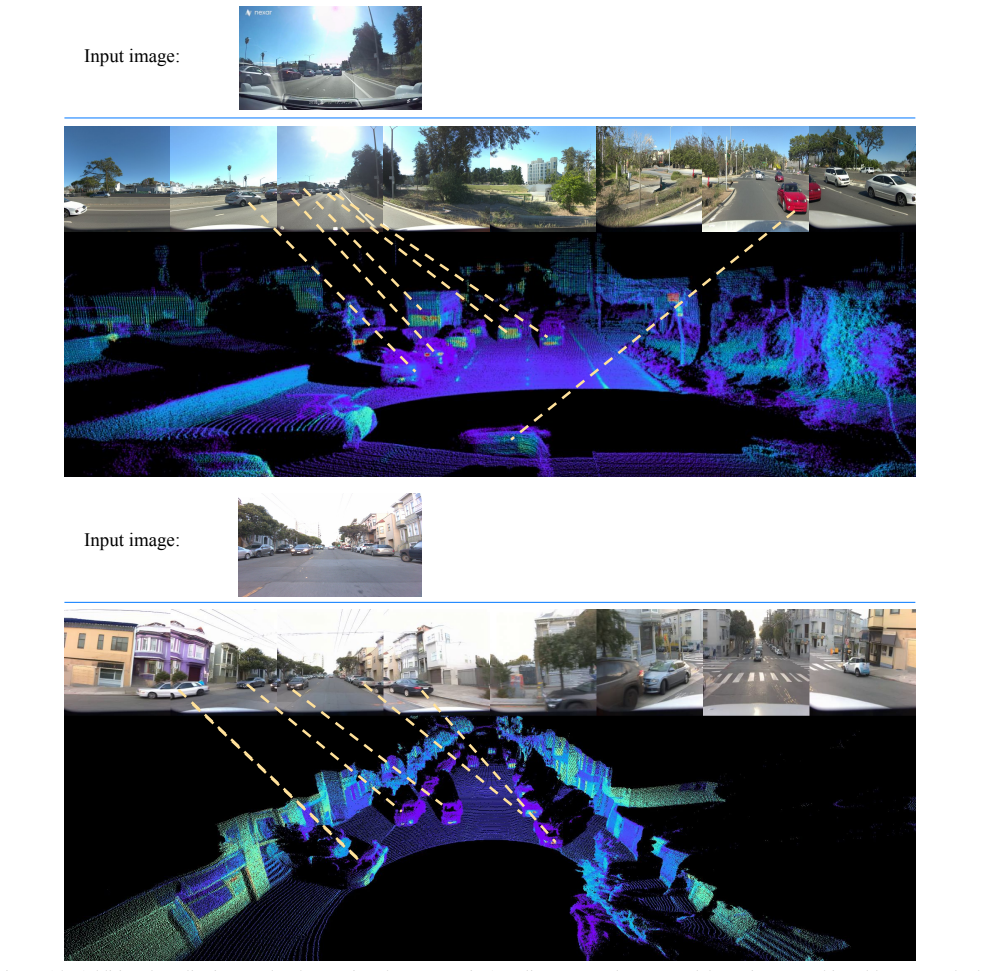
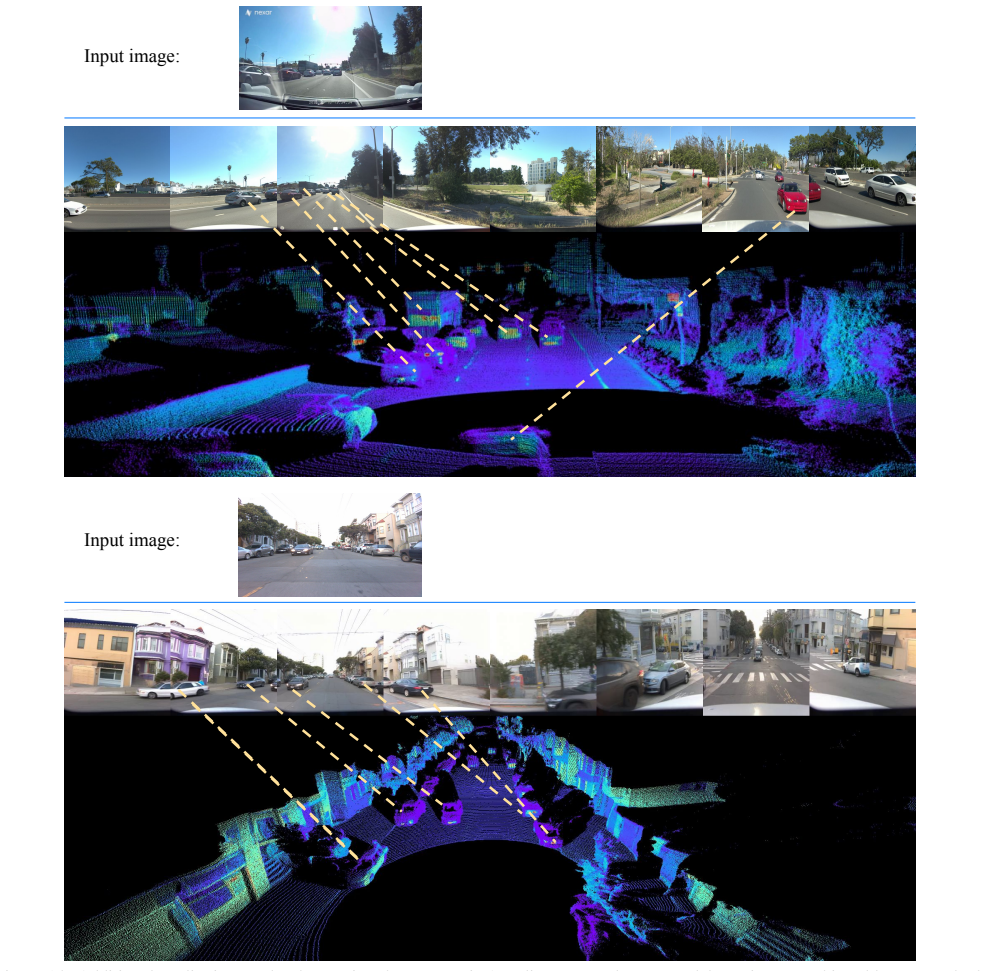
Sensor2Sensor is a generative modeling approach that uses a diffusion architecture to translate in-the-wild monocular dashcam videos into high-fidelity multi-modal AV logs consisting of multi-view camera images and LiDAR point clouds. Training occurs without paired real data by first converting real AV logs into synthetic dashcam videos via 4DGS reconstruction and novel-view rendering, then training the model on these pairs. The method is evaluated for fidelity and demonstrated on real internet and dashcam footage.
What carries the argument
Diffusion-based generative conversion trained on synthetic dashcam videos derived from 4D Gaussian Splatting of real AV logs.
If this is right
- The generated sensor data maintains sufficient fidelity for use in ADS training and validation.
- Challenging in-the-wild footage can be converted into realistic multi-modal formats.
- Vast external data sources become usable for AV development.
- Quantitative evaluations confirm the realism of the output camera images and point clouds.
Where Pith is reading between the lines
- AV training datasets could grow dramatically in geographic and scenario coverage without additional fleet collection.
- Similar conversion techniques might apply to other sensor embodiment mismatches in robotics.
- Downstream task performance on generated data versus real data would be a key test of utility.
Load-bearing premise
Synthetic dashcam videos generated from AV logs are close enough in distribution to real dashcam videos that the diffusion model generalizes to unpaired real inputs.
What would settle it
Training an autonomous driving model on the generated multi-modal outputs and measuring a large drop in task performance or safety metrics relative to the same model trained on real AV logs from matching scenarios.
Figures









read the original abstract
Robust training and validation of Autonomous Driving Systems (ADS) require massive, diverse datasets. Proprietary data collected by Autonomous Vehicle (AV) fleets, while high-fidelity, are limited in scale, diversity of sensor configurations, as well as geographic and long-tail-behavioral coverage. In contrast, in-the-wild data from sources like dashcams offers immense scale and diversity, capturing critical long-tail scenarios and novel environments. However, this unstructured, in-the-wild video data is incompatible with ADS expecting structured, multi-modal sensor inputs for validation and training. To bridge this data gap, we propose Sensor2Sensor, a novel generative modeling paradigm that translates in-the-wild monocular dashcam videos into a high-fidelity, multi-modal sensor suite (AV logs) comprising multi-view camera images and LiDAR point clouds. A core challenge is the lack of paired training data. We address this by converting real AV logs into dashcam-style videos via 4D Gaussian Splatting (4DGS) reconstruction and novel-view rendering. Sensor2Sensor then utilizes a diffusion architecture to perform the generative conversion. We perform comprehensive quantitative evaluations on the fidelity and realism of the generated sensor data. We demonstrate Sensor2Sensor's practical utility by converting challenging in-the-wild internet and dashcam footage into realistic, multi-modal data formats, further unlocking vast external data sources for AV development.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes Sensor2Sensor, a diffusion-based method to translate unpaired monocular in-the-wild dashcam videos into structured multi-modal AV sensor outputs (multi-view images and LiDAR point clouds). Training pairs are synthesized by reconstructing real AV logs with 4D Gaussian Splatting and rendering novel dashcam views; the diffusion model is then trained on these pairs and applied to real footage. The abstract states that comprehensive quantitative evaluations of fidelity and realism are performed, with demonstrations on internet and dashcam data.
Significance. If the generated outputs prove high-fidelity and the model generalizes across the domain gap, the approach would meaningfully expand usable training and validation data for autonomous driving by converting abundant unstructured dashcam sources into AV-compatible formats. The 4DGS-based pair synthesis is a pragmatic engineering contribution that leverages existing high-fidelity logs without requiring new paired collection.
major comments (2)
- [Section 3] Section 3: The training procedure uses only (4DGS-rendered dashcam, original AV log) pairs, yet no quantitative domain-gap measurement (FID, perceptual distance, or sensor calibration error) between the synthetic dashcam distribution and real in-the-wild dashcam distribution is reported. This measurement is load-bearing for the generalization claim, because unmodeled effects (rolling shutter, auto-exposure, compression, ego-motion statistics) may place real inputs outside the training support.
- [Abstract] Abstract and evaluation sections: The abstract asserts 'comprehensive quantitative evaluations on the fidelity and realism of the generated sensor data,' but the manuscript supplies no concrete metrics, baseline comparisons, tables, or error bars. Without these, the empirical support for the central claim that the outputs are 'high-fidelity' and 'realistic' cannot be assessed.
Simulated Author's Rebuttal
We thank the referee for their constructive comments. We address each major comment below and indicate planned revisions to address the concerns raised.
read point-by-point responses
-
Referee: [Section 3] Section 3: The training procedure uses only (4DGS-rendered dashcam, original AV log) pairs, yet no quantitative domain-gap measurement (FID, perceptual distance, or sensor calibration error) between the synthetic dashcam distribution and real in-the-wild dashcam distribution is reported. This measurement is load-bearing for the generalization claim, because unmodeled effects (rolling shutter, auto-exposure, compression, ego-motion statistics) may place real inputs outside the training support.
Authors: We agree that an explicit quantitative measurement of the domain gap would strengthen the generalization argument. The original submission relied on qualitative demonstrations of transfer to real dashcam footage but did not report distribution-level metrics such as FID between the 4DGS-rendered training inputs and real in-the-wild dashcams. In the revision we will add these measurements (FID, LPIPS, and sensor-specific calibration checks) computed on held-out real dashcam data. revision: yes
-
Referee: [Abstract] Abstract and evaluation sections: The abstract asserts 'comprehensive quantitative evaluations on the fidelity and realism of the generated sensor data,' but the manuscript supplies no concrete metrics, baseline comparisons, tables, or error bars. Without these, the empirical support for the central claim that the outputs are 'high-fidelity' and 'realistic' cannot be assessed.
Authors: The referee correctly observes that the submitted manuscript does not contain the concrete metrics, tables, or baseline comparisons needed to support the abstract's claim of comprehensive quantitative evaluation. We will revise the evaluation section to include explicit fidelity metrics (e.g., FID, PSNR, Chamfer distance for LiDAR), baseline comparisons, and error bars, ensuring the empirical claims are fully substantiated. revision: yes
Circularity Check
No circularity in derivation chain
full rationale
The paper presents a method that converts AV logs to synthetic dashcam videos using 4DGS reconstruction and novel-view rendering, then trains a diffusion model on those pairs to translate real dashcam inputs; this relies on established external techniques (4DGS, diffusion) without any equations, fitted parameters, or self-citations that reduce the target output to the inputs by construction. No load-bearing steps match the enumerated circularity patterns, and the central claim remains independent of self-referential reductions.
Axiom & Free-Parameter Ledger
free parameters (1)
- diffusion model architecture and training hyperparameters
axioms (1)
- domain assumption 4D Gaussian Splatting can accurately reconstruct and render novel dashcam views from multi-modal AV logs
Forward citations
Cited by 1 Pith paper
-
Dash2Sim: Closed-Loop Driving Simulation from in-the-wild Dashcam Videos
Dash2Sim recovers metric geo-referenced 4D scenes from in-the-wild monocular dashcam videos to enable the ROADWork4D benchmark, revealing that current closed-loop planners fail on work zone lane changes.
Reference graph
Works this paper leans on
-
[1]
Ying A, Wenzhang Sun, Chang Zeng, Chunfeng Wang, Hao Li, and Jianxun Cui. PAGS: Priority-adaptive gaus- sian splatting for dynamic driving scenes.arXiv preprint arXiv:2510.12282, 2025. 3
-
[2]
Cosmos World Foundation Model Platform for Physical AI
Niket Agarwal, Arslan Ali, Maciej Bala, Yogesh Balaji, Erik Barker, Tiffany Cai, Prithvijit Chattopadhyay, Yongxin Chen, Yin Cui, Yifan Ding, et al. Cosmos world foun- dation model platform for physical ai.arXiv preprint arXiv:2501.03575, 2025. 2
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[3]
V-JEPA 2: Self-Supervised Video Models Enable Understanding, Prediction and Planning
Mido Assran, Adrien Bardes, David Fan, Quentin Garrido, Russell Howes, Matthew Muckley, Ammar Rizvi, Claire Roberts, Koustuv Sinha, Artem Zholus, et al. V-jepa 2: Self- supervised video models enable understanding, prediction and planning.arXiv preprint arXiv:2506.09985, 2025. 2
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[4]
Ge- nie: Generative interactive environments
Jake Bruce, Michael D Dennis, Ashley Edwards, Jack Parker-Holder, Yuge Shi, Edward Hughes, Matthew Lai, Aditi Mavalankar, Richie Steigerwald, Chris Apps, et al. Ge- nie: Generative interactive environments. InICML, 2024. 2
2024
-
[5]
Text2Scenario: Text-driven scenario generation for autonomous driving test
Xuan Cai, Xuesong Bai, Zhiyong Cui, Danmu Xie, Daocheng Fu, Haiyang Yu, and Yilong Ren. Text2Scenario: Text-driven scenario generation for autonomous driving test. arXiv preprint arXiv:2503.02911, 2025. 2
-
[6]
End-to-end autonomous driving: Challenges and frontiers.IEEE TPAMI, 2024
Li Chen, Penghao Wu, Kashyap Chitta, Bernhard Jaeger, An- dreas Geiger, and Hongyang Li. End-to-end autonomous driving: Challenges and frontiers.IEEE TPAMI, 2024. 2
2024
-
[7]
Panoptic-deeplab: A simple, strong, and fast baseline for bottom-up panoptic segmentation
Bowen Cheng, Maxwell D Collins, Yukun Zhu, Ting Liu, Thomas S Huang, Hartwig Adam, and Liang-Chieh Chen. Panoptic-deeplab: A simple, strong, and fast baseline for bottom-up panoptic segmentation. InCVPR, 2020. 8
2020
-
[8]
Xin Fei, Wenzhao Zheng, Yueqi Duan, Wei Zhan, Masayoshi Tomizuka, Kurt Keutzer, and Jiwen Lu. Driv3R: Learn- ing dense 4d reconstruction for autonomous driving.arXiv preprint arXiv:2412.06777, 2024. 3
-
[9]
Geometry- consistent generative adversarial networks for one-sided un- supervised domain mapping
Huan Fu, Mingming Gong, Chaohui Wang, Kayhan Bat- manghelich, Kun Zhang, and Dacheng Tao. Geometry- consistent generative adversarial networks for one-sided un- supervised domain mapping. InCVPR, 2019. 2
2019
-
[10]
Cat3d: Create anything in 3d with multi-view diffusion models
Ruiqi Gao, Aleksander Holynski, Philipp Henzler, Arthur Brussee, Ricardo Martin-Brualla, Pratul Srinivasan, Jonathan T Barron, and Ben Poole. Cat3d: Create anything in 3d with multi-view diffusion models. InNeurIPS, 2024. 4, 5, 1
2024
-
[11]
Foun- dation models in autonomous driving: A survey on scenario generation and scenario analysis.IEEE Open Journal of In- telligent Transportation Systems, 2026
Yuan Gao, Mattia Piccinini, Yuchen Zhang, Dingrui Wang, Korbinian Moller, Roberto Brusnicki, Baha Zarrouki, Alessio Gambi, Jan Frederik Totz, Kai Storms, et al. Foun- dation models in autonomous driving: A survey on scenario generation and scenario analysis.IEEE Open Journal of In- telligent Transportation Systems, 2026. 2
2026
-
[12]
Xiangyu Guo, Zhanqian Wu, Kaixin Xiong, Ziyang Xu, Li- jun Zhou, Gangwei Xu, Shaoqing Xu, Haiyang Sun, Bing Wang, Guang Chen, et al. Genesis: Multimodal driving scene generation with spatio-temporal and cross-modal con- sistency.arXiv preprint arXiv:2506.07497, 2025. 3
-
[13]
David Ha and J ¨urgen Schmidhuber. World models.arXiv preprint arXiv:1803.10122, 2018. 2
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[14]
Learning latent dynamics for planning from pixels
Danijar Hafner, Timothy Lillicrap, Ian Fischer, Ruben Ville- gas, David Ha, Honglak Lee, and James Davidson. Learning latent dynamics for planning from pixels. InICML, 2019
2019
-
[15]
Training Agents Inside of Scalable World Models
Danijar Hafner, Wilson Yan, and Timothy Lillicrap. Train- ing agents inside of scalable world models.arXiv preprint arXiv:2509.24527, 2025. 2
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[16]
Patel, and Fatih Porikli
Deepti Hegde, Rajeev Yasarla, Hong Cai, Shizhong Han, Apratim Bhattacharyya, Shweta Mahajan, Litian Liu, Risheek Garrepalli, Vishal M. Patel, and Fatih Porikli. Dis- tilling multi-modal large language models for autonomous driving. InCVPR, 2025. 2
2025
-
[17]
Gans trained by a two time-scale update rule converge to a local nash equilib- rium
Martin Heusel, Hubert Ramsauer, Thomas Unterthiner, Bernhard Nessler, and Sepp Hochreiter. Gans trained by a two time-scale update rule converge to a local nash equilib- rium. InNeurIPS, 2017. 5
2017
-
[18]
Denoising diffu- sion probabilistic models
Jonathan Ho, Ajay Jain, and Pieter Abbeel. Denoising diffu- sion probabilistic models. InNeurIPS, 2020. 2
2020
-
[19]
GAIA-1: A Generative World Model for Autonomous Driving
Anthony Hu, Lloyd Russell, Hudson Yeo, Zak Murez, George Fedoseev, Alex Kendall, Jamie Shotton, and Gian- luca Corrado. Gaia-1: A generative world model for au- tonomous driving.arXiv preprint arXiv:2309.17080, 2023. 2
work page internal anchor Pith review Pith/arXiv arXiv 2023
- [20]
-
[21]
Txt2Sce: Scenario generation for autonomous driving system testing based on textual reports
Pin Ji, Yang Feng, Zongtai Li, Xiangchi Zhou, Jia Liu, Jun Sun, and Zhihong Zhao. Txt2Sce: Scenario generation for autonomous driving system testing based on textual reports. arXiv preprint arXiv:2509.02150, 2025. 2
-
[22]
3d gaussian splatting for real-time radiance field rendering.ACM Transactions on Graphics,
Bernhard Kerbl, Georgios Kopanas, Thomas Leimk ¨uhler, and George Drettakis. 3d gaussian splatting for real-time radiance field rendering.ACM Transactions on Graphics,
-
[23]
Cosmos Policy: Fine-Tuning Video Models for Visuomotor Control and Planning
Moo Jin Kim, Yihuai Gao, Tsung-Yi Lin, Yen-Chen Lin, Yunhao Ge, Grace Lam, Percy Liang, Shuran Song, Ming- Yu Liu, Chelsea Finn, et al. Cosmos policy: Fine-tuning video models for visuomotor control and planning.arXiv preprint arXiv:2601.16163, 2026. 2
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[24]
Auto-encoding varia- tional bayes
Diederik P Kingma and Max Welling. Auto-encoding varia- tional bayes. InICLR, 2014. 1
2014
-
[25]
A path towards autonomous machine intelli- gence version 0.9
Yann LeCun. A path towards autonomous machine intelli- gence version 0.9. 2, 2022-06-27.Open Review, 2022. 2
2022
-
[26]
Uniscene: Unified occupancy-centric driving scene generation
Bohan Li, Jiazhe Guo, Hongsi Liu, Yingshuang Zou, Yikang Ding, Xiwu Chen, Hu Zhu, Feiyang Tan, Chi Zhang, Tiancai Wang, et al. Uniscene: Unified occupancy-centric driving scene generation. InCVPR, 2025. 3
2025
-
[27]
Genex: Generating an ex- plorable world.arXiv preprint arXiv:2412.09624, 2024
Taiming Lu, Tianmin Shu, Junfei Xiao, Luoxin Ye, Jia- hao Wang, Cheng Peng, Chen Wei, Daniel Khashabi, Rama Chellappa, Alan Yuille, et al. Genex: Generating an ex- plorable world.arXiv preprint arXiv:2412.09624, 2024. 2
-
[28]
Yan Miao, Georgios Fainekos, Bardh Hoxha, Hideki Okamoto, Danil Prokhorov, and Sayan Mitra. From dashcam videos to driving simulations: Stress testing automated vehi- cles against rare events.arXiv preprint arXiv:2411.16027,
-
[29]
VLP: Vision language planning for autonomous driv- ing
Chenbin Pan, Burhaneddin Yaman, Tommaso Nesti, Abhirup Mallik, Alessandro G Allievi, Senem Velipasalar, and Liu Ren. VLP: Vision language planning for autonomous driv- ing. InCVPR, 2024. 2
2024
-
[30]
Scalable diffusion models with transformers
William Peebles and Saining Xie. Scalable diffusion models with transformers. InICCV, 2023. 2
2023
-
[31]
Desire-gs: 4d street gaussians for static-dynamic decomposition and surface reconstruction for urban driving scenes
Chensheng Peng, Chengwei Zhang, Yixiao Wang, Chenfeng Xu, Yichen Xie, Wenzhao Zheng, Kurt Keutzer, Masayoshi Tomizuka, and Wei Zhan. Desire-gs: 4d street gaussians for static-dynamic decomposition and surface reconstruction for urban driving scenes. InCVPR, 2025. 3
2025
-
[32]
Towards realistic scene generation with LiDAR diffusion models
Haoxi Ran, Vitor Guizilini, and Yue Wang. Towards realistic scene generation with LiDAR diffusion models. InCVPR,
-
[33]
Scube: Instant large-scale scene reconstruction using voxsplats
Xuanchi Ren, Yifan Lu, Hanxue Liang, Zhangjie Wu, Huan Ling, Mike Chen, Sanja Fidler, Francis Williams, and Jiahui Huang. Scube: Instant large-scale scene reconstruction using voxsplats. InNeurIPS, 2024. 3
2024
-
[34]
Xuanchi Ren, Yifan Lu, Tianshi Cao, Ruiyuan Gao, Shengyu Huang, Amirmojtaba Sabour, Tianchang Shen, Tobias Pfaff, Jay Zhangjie Wu, Runjian Chen, et al. Cosmos-drive- dreams: Scalable synthetic driving data generation with world foundation models.arXiv preprint arXiv:2506.09042,
-
[35]
Andrew Bagnell
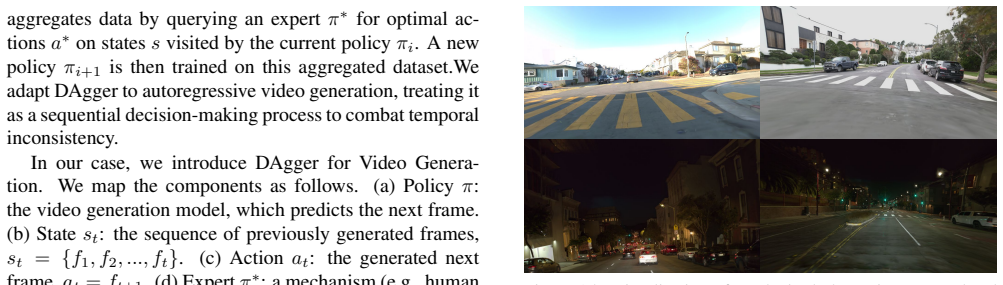
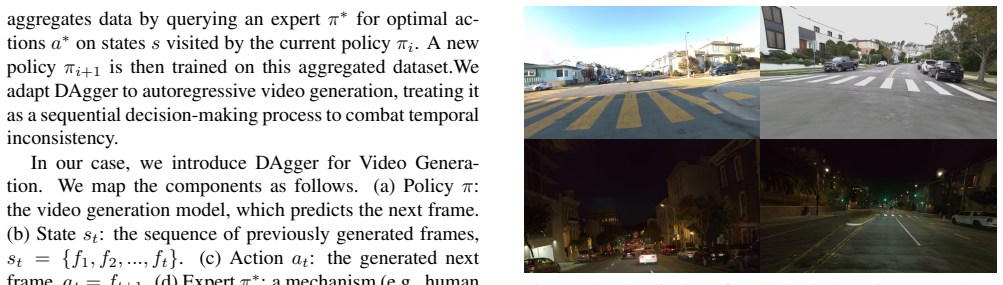
St ´ephane Ross, Geoffrey Gordon, and J. Andrew Bagnell. A reduction of imitation learning and structured prediction to no-regret online learning. InAISTATS, 2011. 5, 6
2011
-
[36]
Sim2real diffusion: Leveraging foundation vision language models for adaptive automated driving.RA-L,
Chinmay Samak, Tanmay Samak, Bing Li, and Venkat Krovi. Sim2real diffusion: Leveraging foundation vision language models for adaptive automated driving.RA-L,
-
[37]
Very Deep Convolutional Networks for Large-Scale Image Recognition
Karen Simonyan and Andrew Zisserman. Very deep convo- lutional networks for large-scale image recognition.arXiv preprint arXiv:1409.1556, 2014. 6
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[38]
Bharat Singh, Viveka Kulharia, Luyu Yang, Avinash Ravichandran, Ambrish Tyagi, and Ashish Shrivastava. Genmm: Geometrically and temporally consistent multi- modal data generation for video and lidar.arXiv preprint arXiv:2406.10722, 2024. 3
-
[39]
Freeman, Joshua B
Vincent Sitzmann, Semon Rezchikov, William T. Freeman, Joshua B. Tenenbaum, and Fredo Durand. Light field net- works: Neural scene representations with single-evaluation rendering. InNeurIPS, 2021. 4, 5
2021
-
[40]
Coda-4dgs: Dynamic gaussian splatting with context and deformation awareness for autonomous driving
Rui Song, Chenwei Liang, Yan Xia, Walter Zimmer, Hu Cao, Holger Caesar, Andreas Festag, and Alois Knoll. Coda-4dgs: Dynamic gaussian splatting with context and deformation awareness for autonomous driving. InICCV, 2025. 3
2025
-
[41]
Omnigen: Unified multimodal sensor gen- eration for autonomous driving
Tao Tang, Enhui Ma, Xia Zhou, Letian Wang, Tianyi Yan, Xueyang Zhang, Kun Zhan, Peng Jia, Xianpeng Lang, Jia- Wang Bian, et al. Omnigen: Unified multimodal sensor gen- eration for autonomous driving. InACM MM, 2025. 3
2025
-
[42]
Fvd: A new metric for video generation.ICLR Workshop,
Thomas Unterthiner, Sjoerd Van Steenkiste, Karol Kurach, Rapha¨el Marinier, Marcin Michalski, and Sylvain Gelly. Fvd: A new metric for video generation.ICLR Workshop,
-
[43]
Wan: Open and Advanced Large-Scale Video Generative Models
Team Wan, Ang Wang, Baole Ai, Bin Wen, Chaojie Mao, Chen-Wei Xie, Di Chen, Feiwu Yu, Haiming Zhao, Jianx- iao Yang, et al. Wan: Open and advanced large-scale video generative models.arXiv preprint arXiv:2503.20314, 2025. 2
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[44]
Flux4D: Flow-based Unsupervised 4D Reconstruction
Jingkang Wang, Henry Che, Yun Chen, Ze Yang, Lily Goli, Sivabalan Manivasagam, and Raquel Urtasun. Flux4d: Flow-based unsupervised 4d reconstruction.arXiv preprint arXiv:2512.03210, 2025. 3
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[45]
Vggt: Vi- sual geometry grounded transformer
Jianyuan Wang, Minghao Chen, Nikita Karaev, Andrea Vedaldi, Christian Rupprecht, and David Novotny. Vggt: Vi- sual geometry grounded transformer. InCVPR, 2025. 5, 6
2025
-
[46]
Drive&gen: Co-evaluating end- to-end driving and video generation models
Jiahao Wang, Zhenpei Yang, Yijing Bai, Yingwei Li, Yu- liang Zou, Bo Sun, Abhijit Kundu, Jose Lezama, Luna Yue Huang, Zehao Zhu, et al. Drive&gen: Co-evaluating end- to-end driving and video generation models. InIROS, 2025. 3
2025
-
[47]
Jiahao Wang, Luoxin Ye, TaiMing Lu, Junfei Xiao, Jiahan Zhang, Yuxiang Guo, Xijun Liu, Rama Chellappa, Cheng Peng, Alan Yuille, et al. Evoworld: Evolving panoramic world generation with explicit 3d memory.arXiv preprint arXiv:2510.01183, 2025. 2
-
[48]
Dc- gaussian: Improving 3d gaussian splatting for reflective dash cam videos
Linhan Wang, Kai Cheng, Shuo Lei, Shengkun Wang, Wei Yin, Chenyang Lei, Xiaoxiao Long, and Chang-Tien Lu. Dc- gaussian: Improving 3d gaussian splatting for reflective dash cam videos. InNeurIPS, 2024. 3
2024
-
[49]
Yifan Wang, Jianjun Zhou, Haoyi Zhu, Wenzheng Chang, Yang Zhou, Zizun Li, Junyi Chen, Jiangmiao Pang, Chunhua Shen, and Tong He.π 3: Scalable permutation-equivariant visual geometry learning.arXiv preprint arXiv:2507.13347,
work page internal anchor Pith review Pith/arXiv arXiv
-
[50]
Image quality assessment: from error visibility to structural similarity.TIP, 2004
Zhou Wang, Alan C Bovik, Hamid R Sheikh, and Eero P Simoncelli. Image quality assessment: from error visibility to structural similarity.TIP, 2004. 5
2004
-
[51]
The waymo world model: A new frontier for autonomous driving simulation.https://waymo
Waymo Team. The waymo world model: A new frontier for autonomous driving simulation.https://waymo. com/blog/2026/02/the-waymo-world-model- a- new- frontier- for- autonomous- driving- simulation/, 2026. Waymo Blog. 2
2026
-
[52]
4d gaussian splatting for real-time dynamic scene rendering
Guanjun Wu, Taoran Yi, Jiemin Fang, Lingxi Xie, Xiaopeng Zhang, Wei Wei, Wenyu Liu, Qi Tian, and Xinggang Wang. 4d gaussian splatting for real-time dynamic scene rendering. InCVPR, 2024. 2, 3
2024
-
[53]
Pham, Mingyu Ding, Masayoshi Tomizuka, and Wei Zhan
Yichen Xie, Chenfeng Xu, Chensheng Peng, Shuqi Zhao, Nhat Ho, Alexander T. Pham, Mingyu Ding, Masayoshi Tomizuka, and Wei Zhan. X-drive: Cross-modality con- sistent multi-sensor data synthesis for driving scenarios. In ICLR, 2025. 3, 5, 6, 7
2025
-
[54]
Con- ditional image synthesis with diffusion models: A survey
Zheyuan Zhan, Defang Chen, Jian-Ping Mei, Zhenghe Zhao, Jiawei Chen, Chun Chen, Siwei Lyu, and Can Wang. Con- ditional image synthesis with diffusion models: A survey. TMLR, 2025. 2
2025
-
[55]
World-in-world: World models in a closed-loop world.arXiv preprint arXiv:2510.18135, 2025
Jiahan Zhang, Muqing Jiang, Nanru Dai, Taiming Lu, Arda Uzunoglu, Shunchi Zhang, Yana Wei, Jiahao Wang, Vishal M Patel, Paul Pu Liang, et al. World-in-world: World models in a closed-loop world.arXiv preprint arXiv:2510.18135, 2025. 2
-
[56]
The unreasonable effectiveness of deep features as a perceptual metric
Richard Zhang, Phillip Isola, Alexei A Efros, Eli Shechtman, and Oliver Wang. The unreasonable effectiveness of deep features as a perceptual metric. InCVPR, 2018. 5, 6
2018
-
[57]
Drivedreamer4d: World models are effective data ma- chines for 4D driving scene representation
Guosheng Zhao, Chaojun Ni, Xiaofeng Wang, Zheng Zhu, Xueyang Zhang, Yida Wang, Guan Huang, Xinze Chen, Boyuan Wang, Youyi Zhang, Wenjun Mei, and Xingang Wang. Drivedreamer4d: World models are effective data ma- chines for 4D driving scene representation. InCVPR, 2025. 3
2025
-
[58]
Scenecrafter: Control- lable multi-view driving scene editing
Zehao Zhu, Yuliang Zou, Chiyu Max Jiang, Bo Sun, Vin- cent Casser, Xiukun Huang, Jiahao Wang, Zhenpei Yang, Ruiqi Gao, Leonidas Guibas, et al. Scenecrafter: Control- lable multi-view driving scene editing. InCVPR, 2025. 2 Sensor2Sensor: Cross-Embodiment Sensor Conversion for Autonomous Driving Supplementary Material A. Extended Qualitative Results In this...
2025
-
[59]
degraded
is then used to compute the distance between these weighted vectors. Finally, the totalL LPIPS is the sum of these spatially-averaged distances across all in- cluded layersi. The LPIPS loss on the signals (normals, elongation, in- tensity, and validity) is calculated by: LLPIPS signal =λ signalLLPIPS(f L signal, ˆf L signal) (6) Here,λ signal is the corre...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.