NeRF: Neural Radiance Field in 3D Vision: A Comprehensive Review (Updated Post-Gaussian Splatting)
Pith reviewed 2026-05-24 10:30 UTC · model grok-4.3
The pith
This survey organizes five years of NeRF research into taxonomies and benchmarks its performance against later methods.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We present a comprehensive survey of NeRF papers from the past five years (2020-2025). These include papers from the pre-Gaussian Splatting era, where NeRF dominated the field for novel view synthesis and 3D implicit and hybrid representation neural field learning. We also include works from the post-Gaussian Splatting era where NeRF and implicit/hybrid neural fields found more niche applications. Our survey is organized into architecture and application-based taxonomies in the pre-Gaussian Splatting era, as well as a categorization of active research areas for NeRF, neural field, and implicit/hybrid neural representation methods. We provide an introduction to the theory of NeRF and its训练via
What carries the argument
Architecture-based and application-based taxonomies that group NeRF, implicit, and hybrid neural representation methods across pre- and post-Gaussian Splatting periods.
If this is right
- The taxonomies allow researchers to locate gaps in current NeRF applications.
- Benchmark tables enable direct speed and quality comparisons between classical NeRF and later implicit or hybrid models.
- The theory section supplies a starting point for readers new to differentiable volume rendering.
- Categorization of active research areas indicates which neural-field directions remain viable after Gaussian Splatting.
Where Pith is reading between the lines
- The niche-application focus after 2023 suggests NeRF methods may persist mainly in settings where explicit splatting is impractical.
- A future extension could add quantitative meta-analysis of how often NeRF papers cite or are cited by Gaussian-Splatting work.
- The survey structure could serve as a template for tracking other representation shifts in 3D vision.
Load-bearing premise
The papers selected and the taxonomies proposed cover the literature representatively without major omissions or systematic bias.
What would settle it
Discovery of multiple prominent NeRF papers published 2020-2025 that fall outside the stated taxonomies or are absent from the survey entirely.
Figures







read the original abstract
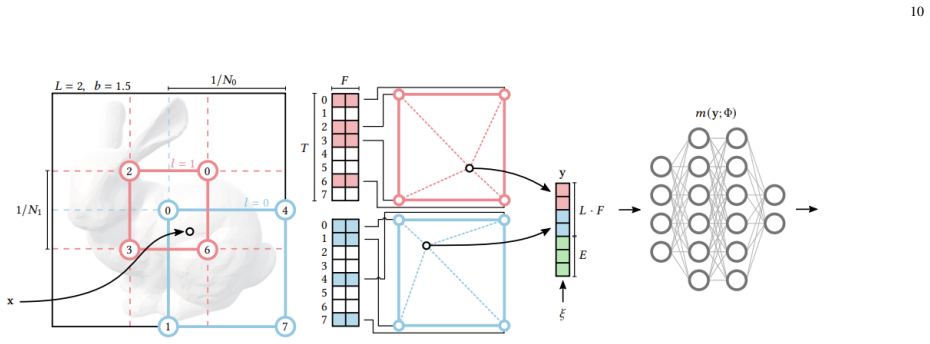
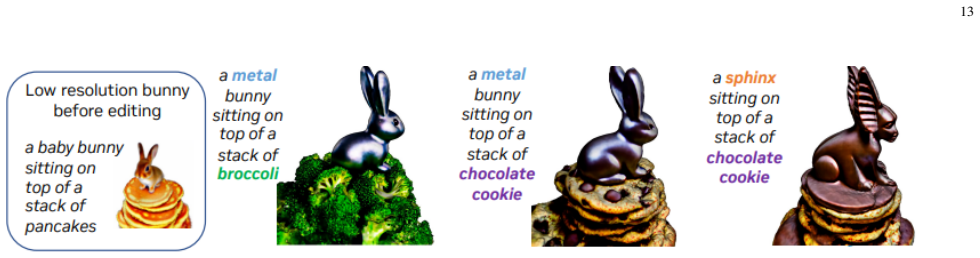
In March 2020, Neural Radiance Field (NeRF) revolutionized Computer Vision, allowing for implicit, neural network-based scene representation and novel view synthesis. NeRF models have found diverse applications in robotics, urban mapping, autonomous navigation, virtual reality/augmented reality, and more. In August 2023, Gaussian Splatting, a direct competitor to the NeRF-based framework, was proposed, gaining tremendous momentum and overtaking NeRF-based research in terms of interest as the dominant framework for novel view synthesis. We present a comprehensive survey of NeRF papers from the past five years (2020-2025). These include papers from the pre-Gaussian Splatting era, where NeRF dominated the field for novel view synthesis and 3D implicit and hybrid representation neural field learning. We also include works from the post-Gaussian Splatting era where NeRF and implicit/hybrid neural fields found more niche applications. Our survey is organized into architecture and application-based taxonomies in the pre-Gaussian Splatting era, as well as a categorization of active research areas for NeRF, neural field, and implicit/hybrid neural representation methods. We provide an introduction to the theory of NeRF and its training via differentiable volume rendering. We also present a benchmark comparison of the performance and speed of classical NeRF, implicit and hybrid neural representation, and neural field models, and an overview of key datasets.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims to deliver a comprehensive survey of NeRF papers from 2020-2025, covering both the pre-Gaussian Splatting era (where NeRF dominated novel view synthesis and implicit/hybrid neural field learning) and the post-Gaussian Splatting era (where NeRF and related methods occupy niche applications). The survey is organized via architecture-based and application-based taxonomies for the earlier period plus a categorization of active research areas; it also supplies an introduction to NeRF theory and differentiable volume rendering, benchmark comparisons of performance and speed across classical NeRF, implicit, hybrid, and neural-field models, and an overview of key datasets. Applications in robotics, urban mapping, autonomous navigation, and VR/AR are highlighted.
Significance. If the taxonomies prove representative and the benchmark comparisons are reproducible and fairly constructed, the survey could serve as a practical reference that helps the community track NeRF's evolving role after Gaussian Splatting displaced it as the dominant novel-view-synthesis framework. The inclusion of speed/performance benchmarks and dataset summaries would add concrete utility beyond narrative organization.
major comments (2)
- [Abstract] Abstract: the central claim that the work constitutes a 'comprehensive survey' of NeRF papers (2020-2025) with 'architecture and application-based taxonomies' rests on the unstated assumption that the selected papers are representative. No search protocol, inclusion/exclusion criteria, database sources, total paper count, or coverage metric is supplied, rendering it impossible to verify whether the taxonomies systematically under-represent post-2023 hybrid methods or particular application domains.
- [Benchmark comparison] Benchmark comparison paragraph: the manuscript states that it 'present[s] a benchmark comparison of the performance and speed' of classical NeRF, implicit/hybrid, and neural-field models, yet provides neither the list of evaluated methods, the precise metrics, the datasets employed, nor any reference to a table or figure containing the quantitative results. This omission prevents assessment of whether the comparisons fairly support claims about NeRF's niche viability after Gaussian Splatting.
minor comments (1)
- [Abstract] The abstract would benefit from an explicit statement of the total number of papers reviewed to give readers an immediate sense of scope.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the survey's claims of comprehensiveness and the benchmark section. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the work constitutes a 'comprehensive survey' of NeRF papers (2020-2025) with 'architecture and application-based taxonomies' rests on the unstated assumption that the selected papers are representative. No search protocol, inclusion/exclusion criteria, database sources, total paper count, or coverage metric is supplied, rendering it impossible to verify whether the taxonomies systematically under-represent post-2023 hybrid methods or particular application domains.
Authors: We agree that transparency in paper selection is required to support the 'comprehensive' claim. In the revised manuscript we will add a dedicated subsection in the introduction that specifies the literature search protocol, including databases (arXiv, Google Scholar, CVPR/ICCV/ECCV), keywords, time range (2020-2025), inclusion criteria (relevance to NeRF/neural fields/implicit representations), exclusion criteria, and the total number of papers reviewed and categorized. This will enable readers to evaluate coverage of post-2023 hybrids and application domains. revision: yes
-
Referee: [Benchmark comparison] Benchmark comparison paragraph: the manuscript states that it 'present[s] a benchmark comparison of the performance and speed' of classical NeRF, implicit/hybrid, and neural-field models, yet provides neither the list of evaluated methods, the precise metrics, the datasets employed, nor any reference to a table or figure containing the quantitative results. This omission prevents assessment of whether the comparisons fairly support claims about NeRF's niche viability after Gaussian Splatting.
Authors: The referee is correct that the current text announces a benchmark comparison without supplying the supporting details or table. We will revise the manuscript to include an explicit table (or subsection) listing the evaluated methods, metrics (PSNR, SSIM, rendering FPS), datasets used, and citations to the source papers or reported results. The table will distinguish literature-reported numbers from any new comparisons and will be referenced directly from the benchmark paragraph. revision: yes
Circularity Check
No circularity: descriptive survey without derivations or predictions
full rationale
This is a literature survey that organizes existing external papers into taxonomies and provides benchmark overviews; it contains no mathematical derivations, fitted parameters, predictions, or first-principles results that could reduce to the paper's own inputs by construction. The central claim of providing a representative taxonomy rests on selection of prior work rather than any self-referential equation or self-citation chain that defines its own output. No steps meet the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 7 Pith papers
-
Motion-Enabled Tomography via Gaussian Mixture Models
A parametric GMM model for motion-enabled tomography that decouples reconstruction into sub-problems and tests on 2D simulations of intersecting trajectories.
-
Sparse-to-Complete: From Sparse Image Captures to Complete 3D Scenes
S2C-3D reconstructs complete high-fidelity 3D scenes from as few as 6-8 images by finetuning a diffusion model on scene data, applying consistency-conditioned sampling, and planning trajectories for full coverage.
-
MU-GeNeRF: Multi-view Uncertainty-guided Generalizable Neural Radiance Fields for Distractor-aware Scene
MU-GeNeRF combines source-view and target-view uncertainties via a heteroscedastic loss to enable distractor-aware generalizable NeRF reconstruction that matches scene-specific methods.
-
AnchorSplat: Feed-Forward 3D Gaussian Splatting with 3D Geometric Priors
AnchorSplat uses anchor-aligned 3D Gaussians guided by geometric priors for feed-forward scene reconstruction, achieving SOTA novel view synthesis on ScanNet++ with fewer primitives and better view consistency.
-
Real2Sim: A Physics-driven and Editable Gaussian Splatting Framework for Autonomous Driving Scenes
Real2Sim reconstructs editable dynamic driving scenes as temporally continuous Gaussians integrated with a differentiable MPM physics solver for high-fidelity simulation of interactions and collisions.
-
3D Reconstruction and Knowledge Distillation to Improve Multi-View Image Models to Explore Spike Volume Estimation in Wheat
Knowledge distillation from a rigid-invariant 3D point cloud network into a regulated multi-view Transformer yields lower-error, faster wheat spike volume estimates from 2D images.
-
Safe Navigation using Neural Radiance Fields via Reachable Sets
Safe robot navigation in obstacle-rich environments is demonstrated in simulation by representing obstacles with NeRFs and enforcing safety via reachable-set constraints inside a linear-matrix-inequality optimal-contr...
Reference graph
Works this paper leans on
-
[1]
Nerf: Representing scenes as neural radiance fields for view synthesis,
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoor- thi, and R. Ng, “Nerf: Representing scenes as neural radiance fields for view synthesis,” inEuropean conference on computer vision. Springer, 2020, pp. 405–421
work page 2020
-
[2]
Structure-from-motion revisited,
J. L. Schonberger and J.-M. Frahm, “Structure-from-motion revisited,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 2016, pp. 4104–4113
work page 2016
-
[3]
M. Levoy and P. Hanrahan, “Light field rendering,” in Proceedings of the 23rd annual conference on Computer graphics and interactive techniques, 1996, pp. 31–42
work page 1996
-
[4]
S. J. Gortler, R. Grzeszczuk, R. Szeliski, and M. F. Cohen, “The lumigraph,” in Proceedings of the 23rd annual conference on Computer graphics and interactive techniques , 1996, pp. 43–54
work page 1996
-
[5]
Local light field fusion: Practical view synthesis with prescriptive sampling guidelines,
B. Mildenhall, P. P. Srinivasan, R. Ortiz-Cayon, N. K. Kalantari, R. Ra- mamoorthi, R. Ng, and A. Kar, “Local light field fusion: Practical view synthesis with prescriptive sampling guidelines,” ACM Transactions on Graphics (TOG), vol. 38, no. 4, pp. 1–14, 2019
work page 2019
-
[6]
Scene representation networks: Continuous 3d-structure-aware neural scene representations,
V . Sitzmann, M. Zollh ¨ofer, and G. Wetzstein, “Scene representation networks: Continuous 3d-structure-aware neural scene representations,” Advances in Neural Information Processing Systems , vol. 32, 2019
work page 2019
-
[7]
Neural volumes: learning dynamic renderable volumes from images,
S. Lombardi, T. Simon, J. Saragih, G. Schwartz, A. Lehrmann, and Y . Sheikh, “Neural volumes: learning dynamic renderable volumes from images,” ACM Transactions on Graphics (TOG) , vol. 38, no. 4, pp. 1–14, 2019
work page 2019
-
[8]
Differ- entiable volumetric rendering: Learning implicit 3d representations without 3d supervision,
M. Niemeyer, L. Mescheder, M. Oechsle, and A. Geiger, “Differ- entiable volumetric rendering: Learning implicit 3d representations without 3d supervision,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2020, pp. 3504–3515. 22
work page 2020
-
[9]
Local deep implicit functions for 3d shape,
K. Genova, F. Cole, A. Sud, A. Sarna, and T. Funkhouser, “Local deep implicit functions for 3d shape,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2020, pp. 4857–4866
work page 2020
-
[10]
Deepsdf: Learning continuous signed distance functions for shape rep- resentation,
J. J. Park, P. Florence, J. Straub, R. Newcombe, and S. Lovegrove, “Deepsdf: Learning continuous signed distance functions for shape rep- resentation,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , 2019, pp. 165–174
work page 2019
-
[11]
Neural volume rendering: Nerf and beyond,
F. Dellaert and L. Yen-Chen, “Neural volume rendering: Nerf and beyond,” arXiv preprint arXiv:2101.05204 , 2020
-
[12]
Neural fields in visual computing and beyond,
Y . Xie, T. Takikawa, S. Saito, O. Litany, S. Yan, N. Khan, F. Tombari, J. Tompkin, V . Sitzmann, and S. Sridhar, “Neural fields in visual computing and beyond,” in Computer Graphics Forum, vol. 41, no. 2. Wiley Online Library, 2022, pp. 641–676
work page 2022
-
[13]
Multimodal image synthesis and editing: A survey,
F. Zhan, Y . Yu, R. Wu, J. Zhang, and S. Lu, “Multimodal image synthesis and editing: A survey,” arXiv preprint arXiv:2112.13592 , 2021
-
[14]
Clip-nerf: Text-and- image driven manipulation of neural radiance fields,
C. Wang, M. Chai, M. He, D. Chen, and J. Liao, “Clip-nerf: Text-and- image driven manipulation of neural radiance fields,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recog- nition, 2022, pp. 3835–3844
work page 2022
-
[15]
Ad- nerf: Audio driven neural radiance fields for talking head synthesis,
Y . Guo, K. Chen, S. Liang, Y .-J. Liu, H. Bao, and J. Zhang, “Ad- nerf: Audio driven neural radiance fields for talking head synthesis,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 5784–5794
work page 2021
-
[16]
Zero-shot text-guided object generation with dream fields,
A. Jain, B. Mildenhall, J. T. Barron, P. Abbeel, and B. Poole, “Zero-shot text-guided object generation with dream fields,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2022, pp. 867–876
work page 2022
-
[17]
Cg-nerf: Conditional generative neural radiance fields,
K. Jo, G. Shim, S. Jung, S. Yang, and J. Choo, “Cg-nerf: Conditional generative neural radiance fields,” IEEE/CVF Winter Conference on Applications of Computer Vision (WACV) , 2023
work page 2023
-
[18]
Ide-3d: Interactive disentangled editing for high-resolution 3d-aware portrait synthesis,
J. Sun, X. Wang, Y . Shi, L. Wang, J. Wang, and Y . Liu, “Ide-3d: Interactive disentangled editing for high-resolution 3d-aware portrait synthesis,” arXiv preprint arXiv:2205.15517 , 2022
-
[19]
Sem2nerf: Converting single-view semantic masks to neural radiance fields,
Y . Chen, Q. Wu, C. Zheng, T.-J. Cham, and J. Cai, “Sem2nerf: Converting single-view semantic masks to neural radiance fields,” European conference on computer vision , 2022
work page 2022
-
[20]
A. Tewari, J. Thies, B. Mildenhall, P. Srinivasan, E. Tretschk, W. Yifan, C. Lassner, V . Sitzmann, R. Martin-Brualla, S. Lombardi et al. , “Advances in neural rendering,” in Computer Graphics Forum, vol. 41, no. 2. Wiley Online Library, 2022, pp. 703–735
work page 2022
-
[21]
J. T. Kajiya and B. P. V on Herzen, “Ray tracing volume densities,”ACM SIGGRAPH computer graphics , vol. 18, no. 3, pp. 165–174, 1984
work page 1984
-
[22]
Regnerf: Regularizing neural radiance fields for view synthesis from sparse inputs,
M. Niemeyer, J. T. Barron, B. Mildenhall, M. S. Sajjadi, A. Geiger, and N. Radwan, “Regnerf: Regularizing neural radiance fields for view synthesis from sparse inputs,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2022, pp. 5480–5490
work page 2022
-
[23]
Depth-supervised nerf: Fewer views and faster training for free,
K. Deng, A. Liu, J.-Y . Zhu, and D. Ramanan, “Depth-supervised nerf: Fewer views and faster training for free,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2022, pp. 12 882–12 891
work page 2022
-
[24]
Nerfren: Neural radiance fields with reflections,
Y .-C. Guo, D. Kang, L. Bao, Y . He, and S.-H. Zhang, “Nerfren: Neural radiance fields with reflections,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2022, pp. 18 409–18 418
work page 2022
-
[25]
Sinnerf: Training neural radiance fields on complex scenes from a single image,
D. Xu, Y . Jiang, P. Wang, Z. Fan, H. Shi, and Z. Wang, “Sinnerf: Training neural radiance fields on complex scenes from a single image,” 2022
work page 2022
-
[26]
Fourier features let networks learn high frequency functions in low dimensional domains,
M. Tancik, P. Srinivasan, B. Mildenhall, S. Fridovich-Keil, N. Ragha- van, U. Singhal, R. Ramamoorthi, J. Barron, and R. Ng, “Fourier features let networks learn high frequency functions in low dimensional domains,”Advances in Neural Information Processing Systems, vol. 33, pp. 7537–7547, 2020
work page 2020
-
[27]
Beyond periodicity: towards a unifying framework for activations in coordinate-mlps,
S. Ramasinghe and S. Lucey, “Beyond periodicity: towards a unifying framework for activations in coordinate-mlps,” in Computer Vision– ECCV 2022: 17th European Conference, Tel Aviv, Israel, October 23– 27, 2022, Proceedings, Part XXXIII . Springer, 2022, pp. 142–158
work page 2022
-
[28]
Large scale multi-view stereopsis evaluation,
R. Jensen, A. Dahl, G. V ogiatzis, E. Tola, and H. Aanæs, “Large scale multi-view stereopsis evaluation,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 2014, pp. 406– 413
work page 2014
-
[29]
Bouguet, Camera Calibration Toolbox for Matlab
J.-Y . Bouguet, Camera Calibration Toolbox for Matlab. CaltechDATA, May 2022. [Online]. Available: https://data.caltech.edu/records/20164
work page 2022
-
[30]
Scannet: Richly-annotated 3d reconstructions of indoor scenes,
A. Dai, A. X. Chang, M. Savva, M. Halber, T. Funkhouser, and M. Nießner, “Scannet: Richly-annotated 3d reconstructions of indoor scenes,” in Proceedings of the IEEE conference on computer vision and pattern recognition , 2017, pp. 5828–5839
work page 2017
-
[31]
A. Dai, M. Nießner, M. Zoll ¨ofer, S. Izadi, and C. Theobalt, “Bundlefu- sion: Real-time globally consistent 3d reconstruction using on-the-fly surface re-integration,” ACM Transactions on Graphics 2017 (TOG) , 2017
work page 2017
-
[32]
ShapeNet: An Information-Rich 3D Model Repository
A. X. Chang, T. Funkhouser, L. Guibas, P. Hanrahan, Q. Huang, Z. Li, S. Savarese, M. Savva, S. Song, H. Su et al. , “Shapenet: An information-rich 3d model repository,” arXiv preprint arXiv:1512.03012, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[33]
Tanks and temples: Benchmarking large-scale scene reconstruction,
A. Knapitsch, J. Park, Q.-Y . Zhou, and V . Koltun, “Tanks and temples: Benchmarking large-scale scene reconstruction,” ACM Transactions on Graphics (ToG), vol. 36, no. 4, pp. 1–13, 2017
work page 2017
-
[34]
Matterport3D: Learning from RGB-D Data in Indoor Environments
A. Chang, A. Dai, T. Funkhouser, M. Halber, M. Niessner, M. Savva, S. Song, A. Zeng, and Y . Zhang, “Matterport3d: Learning from rgb-d data in indoor environments,” arXiv preprint arXiv:1709.06158 , 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[35]
The Replica Dataset: A Digital Replica of Indoor Spaces
J. Straub, T. Whelan, L. Ma, Y . Chen, E. Wijmans, S. Green, J. J. Engel, R. Mur-Artal, C. Ren, S. Verma et al. , “The replica dataset: A digital replica of indoor spaces,” arXiv preprint arXiv:1906.05797 , 2019
work page internal anchor Pith review Pith/arXiv arXiv 1906
-
[36]
JaxNeRF: an efficient JAX implementation of NeRF,
B. Deng, J. T. Barron, and P. P. Srinivasan, “JaxNeRF: an efficient JAX implementation of NeRF,” 2020. [Online]. Available: https://github.com/google-research/google-research/tree/master/jaxnerf
work page 2020
-
[37]
L. Liu, J. Gu, K. Z. Lin, T.-S. Chua, and C. Theobalt, “Neural sparse voxel fields,” NeurIPS, 2020
work page 2020
-
[38]
Baking neural radiance fields for real-time view synthesis,
P. Hedman, P. P. Srinivasan, B. Mildenhall, J. T. Barron, and P. De- bevec, “Baking neural radiance fields for real-time view synthesis,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 5875–5884
work page 2021
-
[39]
PlenOctrees for real-time rendering of neural radiance fields,
A. Yu, R. Li, M. Tancik, H. Li, R. Ng, and A. Kanazawa, “PlenOctrees for real-time rendering of neural radiance fields,” in ICCV, 2021
work page 2021
-
[40]
Fastnerf: High-fidelity neural rendering at 200fps,
S. J. Garbin, M. Kowalski, M. Johnson, J. Shotton, and J. Valentin, “Fastnerf: High-fidelity neural rendering at 200fps,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 14 346–14 355
work page 2021
-
[41]
Kilonerf: Speeding up neural radiance fields with thousands of tiny mlps,
C. Reiser, S. Peng, Y . Liao, and A. Geiger, “Kilonerf: Speeding up neural radiance fields with thousands of tiny mlps,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 14 335–14 345
work page 2021
-
[42]
T. M ¨uller, A. Evans, C. Schied, and A. Keller, “Instant neural graphics primitives with a multiresolution hash encoding,” ACM Trans. Graph., vol. 41, no. 4, pp. 102:1–102:15, Jul. 2022. [Online]. Available: https://doi.org/10.1145/3528223.3530127
-
[43]
Plenoxels: Radiance fields without neural networks
A. Yu, S. Fridovich-Keil, M. Tancik, Q. Chen, B. Recht, and A. Kanazawa, “Plenoxels: Radiance fields without neural networks,” arXiv preprint arXiv:2112.05131 , 2021
-
[44]
Direct voxel grid optimization: Super-fast convergence for radiance fields reconstruction,
C. Sun, M. Sun, and H.-T. Chen, “Direct voxel grid optimization: Super-fast convergence for radiance fields reconstruction,” in Proceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 5459–5469
work page 2022
-
[45]
Tensorf: Tensorial radiance fields,
A. Chen, Z. Xu, A. Geiger, J. Yu, and H. Su, “Tensorf: Tensorial radiance fields,” in Computer Vision–ECCV 2022: 17th European Conference, Tel Aviv, Israel, October 23–27, 2022, Proceedings, Part XXXII. Springer, 2022, pp. 333–350
work page 2022
-
[46]
Mip-nerf: A multiscale representation for anti- aliasing neural radiance fields,
J. T. Barron, B. Mildenhall, M. Tancik, P. Hedman, R. Martin-Brualla, and P. P. Srinivasan, “Mip-nerf: A multiscale representation for anti- aliasing neural radiance fields,” in Proceedings of the IEEE/CVF International Conference on Computer Vision , 2021, pp. 5855–5864
work page 2021
-
[47]
Ref-nerf: Structured view-dependent appearance for neural radiance fields,
D. Verbin, P. Hedman, B. Mildenhall, T. Zickler, J. T. Barron, and P. P. Srinivasan, “Ref-nerf: Structured view-dependent appearance for neural radiance fields,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2022, pp. 5491–5500
work page 2022
-
[48]
Mvsnerf: Fast generalizable radiance field reconstruction from multi- view stereo,
A. Chen, Z. Xu, F. Zhao, X. Zhang, F. Xiang, J. Yu, and H. Su, “Mvsnerf: Fast generalizable radiance field reconstruction from multi- view stereo,” inProceedings of the IEEE/CVF International Conference on Computer Vision , 2021, pp. 14 124–14 133
work page 2021
-
[49]
Putting nerf on a diet: Semantically consistent few-shot view synthesis,
A. Jain, M. Tancik, and P. Abbeel, “Putting nerf on a diet: Semantically consistent few-shot view synthesis,” in Proceedings of the IEEE/CVF International Conference on Computer Vision , 2021, pp. 5885–5894
work page 2021
-
[50]
Mine: Towards continuous depth mpi with nerf for novel view synthesis,
J. Li, Z. Feng, Q. She, H. Ding, C. Wang, and G. H. Lee, “Mine: Towards continuous depth mpi with nerf for novel view synthesis,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 12 578–12 588
work page 2021
-
[51]
Panoptic neural fields: A semantic object-aware neural scene representation,
A. Kundu, K. Genova, X. Yin, A. Fathi, C. Pantofaru, L. J. Guibas, A. Tagliasacchi, F. Dellaert, and T. Funkhouser, “Panoptic neural fields: A semantic object-aware neural scene representation,” in Proceedings 23 of the IEEE/CVF Conference on Computer Vision and Pattern Recog- nition, 2022, pp. 12 871–12 881
work page 2022
-
[52]
Are we ready for autonomous driving? the kitti vision benchmark suite,
A. Geiger, P. Lenz, and R. Urtasun, “Are we ready for autonomous driving? the kitti vision benchmark suite,” in Conference on Computer Vision and Pattern Recognition (CVPR) , 2012
work page 2012
-
[53]
Vision meets robotics: The kitti dataset,
A. Geiger, P. Lenz, C. Stiller, and R. Urtasun, “Vision meets robotics: The kitti dataset,” The International Journal of Robotics Research , vol. 32, no. 11, pp. 1231–1237, 2013
work page 2013
-
[54]
A new performance measure and evaluation benchmark for road detection algorithms,
J. Fritsch, T. Kuehnl, and A. Geiger, “A new performance measure and evaluation benchmark for road detection algorithms,” in International Conference on Intelligent Transportation Systems (ITSC) , 2013
work page 2013
-
[55]
Object scene flow for autonomous vehicles,
M. Menze and A. Geiger, “Object scene flow for autonomous vehicles,” in Conference on Computer Vision and Pattern Recognition (CVPR) , 2015
work page 2015
-
[56]
Kitti-360: A novel dataset and benchmarks for urban scene understanding in 2d and 3d,
Y . Liao, J. Xie, and A. Geiger, “Kitti-360: A novel dataset and benchmarks for urban scene understanding in 2d and 3d,” IEEE Transactions on Pattern Analysis and Machine Intelligence , 2022
work page 2022
-
[57]
Scalability in perception for autonomous driving: Waymo open dataset,
P. Sun, H. Kretzschmar, X. Dotiwalla, A. Chouard, V . Patnaik, P. Tsui, J. Guo, Y . Zhou, Y . Chai, B. Caine et al. , “Scalability in perception for autonomous driving: Waymo open dataset,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , 2020, pp. 2446–2454
work page 2020
-
[58]
Nerfies: Deformable neural radiance fields,
K. Park, U. Sinha, J. T. Barron, S. Bouaziz, D. B. Goldman, S. M. Seitz, and R. Martin-Brualla, “Nerfies: Deformable neural radiance fields,” ICCV, 2021
work page 2021
-
[59]
Hypernerf: A higher-dimensional representation for topologically varying neural radiance fields,
K. Park, U. Sinha, P. Hedman, J. T. Barron, S. Bouaziz, D. B. Goldman, R. Martin-Brualla, and S. M. Seitz, “Hypernerf: A higher-dimensional representation for topologically varying neural radiance fields,” ACM Trans. Graph., vol. 40, no. 6, dec 2021
work page 2021
-
[60]
S. Peng, Y . Zhang, Y . Xu, Q. Wang, Q. Shuai, H. Bao, and X. Zhou, “Neural body: Implicit neural representations with structured latent codes for novel view synthesis of dynamic humans,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recog- nition, 2021, pp. 9054–9063
work page 2021
-
[61]
Neuman: Neural human radiance field from a single video,
W. Jiang, K. M. Yi, G. Samei, O. Tuzel, and A. Ranjan, “Neuman: Neural human radiance field from a single video,” in Computer Vision– ECCV 2022: 17th European Conference, Tel Aviv, Israel, October 23– 27, 2022, Proceedings, Part XXXII . Springer, 2022, pp. 402–418
work page 2022
-
[62]
Panoptic studio: A massively multiview system for social motion capture,
H. Joo, H. Liu, L. Tan, L. Gui, B. Nabbe, I. Matthews, T. Kanade, S. Nobuhara, and Y . Sheikh, “Panoptic studio: A massively multiview system for social motion capture,” in Proceedings of the IEEE Inter- national Conference on Computer Vision , 2015, pp. 3334–3342
work page 2015
-
[63]
Image quality assessment: from error visibility to structural similarity,
Z. Wang, A. C. Bovik, H. R. Sheikh, and E. P. Simoncelli, “Image quality assessment: from error visibility to structural similarity,” IEEE transactions on image processing , vol. 13, no. 4, pp. 600–612, 2004
work page 2004
-
[64]
The unreasonable effectiveness of deep features as a perceptual metric,
R. Zhang, P. Isola, A. A. Efros, E. Shechtman, and O. Wang, “The unreasonable effectiveness of deep features as a perceptual metric,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 2018, pp. 586–595
work page 2018
-
[65]
SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and <0.5MB model size
F. N. Iandola, S. Han, M. W. Moskewicz, K. Ashraf, W. J. Dally, and K. Keutzer, “Squeezenet: Alexnet-level accuracy with 50x fewer parameters and¡ 0.5 mb model size,” arXiv preprint arXiv:1602.07360, 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[66]
Very Deep Convolutional Networks for Large-Scale Image Recognition
K. Simonyan and A. Zisserman, “Very deep convolutional networks for large-scale image recognition,” arXiv preprint arXiv:1409.1556 , 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[67]
Imagenet classification with deep convolutional neural networks,
A. Krizhevsky, I. Sutskever, and G. E. Hinton, “Imagenet classification with deep convolutional neural networks,” Advances in neural infor- mation processing systems , vol. 25, 2012
work page 2012
-
[68]
Nerf in the dark: High dynamic range view synthesis from noisy raw images,
B. Mildenhall, P. Hedman, R. Martin-Brualla, P. P. Srinivasan, and J. T. Barron, “Nerf in the dark: High dynamic range view synthesis from noisy raw images,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2022, pp. 16 190–16 199
work page 2022
-
[69]
Dense depth priors for neural radiance fields from sparse input views,
B. Roessle, J. T. Barron, B. Mildenhall, P. P. Srinivasan, and M. Nießner, “Dense depth priors for neural radiance fields from sparse input views,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2022, pp. 12 892–12 901
work page 2022
-
[70]
Nerfingmvs: Guided optimization of neural radiance fields for indoor multi-view stereo,
Y . Wei, S. Liu, Y . Rao, W. Zhao, J. Lu, and J. Zhou, “Nerfingmvs: Guided optimization of neural radiance fields for indoor multi-view stereo,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 5610–5619
work page 2021
-
[71]
K. Rematas, A. Liu, P. P. Srinivasan, J. T. Barron, A. Tagliasacchi, T. Funkhouser, and V . Ferrari, “Urban radiance fields,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recog- nition, 2022, pp. 12 932–12 942
work page 2022
-
[72]
Point-nerf: Point-based neural radiance fields,
Q. Xu, Z. Xu, J. Philip, S. Bi, Z. Shu, K. Sunkavalli, and U. Neumann, “Point-nerf: Point-based neural radiance fields,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2022, pp. 5438–5448
work page 2022
-
[73]
Autoint: Automatic integration for fast neural volume rendering,
D. B. Lindell, J. N. Martel, and G. Wetzstein, “Autoint: Automatic integration for fast neural volume rendering,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2021, pp. 14 556–14 565
work page 2021
-
[74]
pixelNeRF: Neural radiance fields from one or few images,
A. Yu, V . Ye, M. Tancik, and A. Kanazawa, “pixelNeRF: Neural radiance fields from one or few images,” in CVPR, 2021
work page 2021
-
[75]
Neural rays for occlusion-aware image-based rendering,
Y . Liu, S. Peng, L. Liu, Q. Wang, P. Wang, C. Theobalt, X. Zhou, and W. Wang, “Neural rays for occlusion-aware image-based rendering,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 7824–7833
work page 2022
-
[76]
Giraffe: Representing scenes as composi- tional generative neural feature fields,
M. Niemeyer and A. Geiger, “Giraffe: Representing scenes as composi- tional generative neural feature fields,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , 2021, pp. 11 453–11 464
work page 2021
-
[77]
Graf: Generative radiance fields for 3d-aware image synthesis,
K. Schwarz, Y . Liao, M. Niemeyer, and A. Geiger, “Graf: Generative radiance fields for 3d-aware image synthesis,” Advances in Neural Information Processing Systems , vol. 33, pp. 20 154–20 166, 2020
work page 2020
-
[78]
pi- gan: Periodic implicit generative adversarial networks for 3d-aware image synthesis,
E. R. Chan, M. Monteiro, P. Kellnhofer, J. Wu, and G. Wetzstein, “pi- gan: Periodic implicit generative adversarial networks for 3d-aware image synthesis,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , 2021, pp. 5799–5809
work page 2021
-
[79]
Gnerf: Gan-based neural radiance field without posed camera,
Q. Meng, A. Chen, H. Luo, M. Wu, H. Su, L. Xu, X. He, and J. Yu, “Gnerf: Gan-based neural radiance field without posed camera,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 6351–6361
work page 2021
-
[80]
Stylenerf: A style-based 3d aware generator for high-resolution image synthesis,
J. Gu, L. Liu, P. Wang, and C. Theobalt, “Stylenerf: A style-based 3d aware generator for high-resolution image synthesis,” in Tenth International Conference on Learning Representations , 2022, pp. 1– 25
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.