DBPnet: Damper Characteristics-Based Bayesian Physics-Informed Neural Network for Wheel Load Estimation
Pith reviewed 2026-06-30 00:11 UTC · model grok-4.3
The pith
DBPnet estimates vehicle wheel loads more accurately by combining suspension geometry modeling with Bayesian inference and a damper characteristics embedding in a physics-informed neural network.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
DBPnet integrates suspension linkage-level modeling to build a nonlinear dynamic model, applies Bayesian inference for noise robustness, uses a physics-informed loss for physical consistency, and adds a damper characteristics-inspired embedding module to feed temporal features into each PINN layer, yielding lower RMSE and MaxError than baselines across simulations and real experiments.
What carries the argument
The damper characteristics-inspired embedding module, which extracts temporal variation features from input signals and feeds them into every layer of the Bayesian PINN while the suspension linkage-level model supplies the geometric nonlinear dynamics.
If this is right
- Wheel load estimates become consistent with both measured data and fundamental physical principles even under noise.
- The Bayesian treatment allows the network to quantify uncertainty in chassis states rather than outputting point estimates only.
- ADAS actuator functions receive more reliable wheel load signals for stability and safety control.
- The embedding approach avoids locking the network to a single fixed physical model while still guiding it with observations.
Where Pith is reading between the lines
- The same embedding and Bayesian structure might transfer to estimating other nonlinear vehicle states such as tire slip or body roll.
- Online retraining on streaming sensor data could turn the model into an adaptive estimator for changing road or load conditions.
- Similar physics-informed Bayesian networks could address state estimation in other mechanical systems that combine geometry-driven nonlinearity with noisy measurements.
Load-bearing premise
The suspension linkage-level modeling accurately constructs a nonlinear instantaneous dynamic model by explicitly considering the complex geometric structure of the suspension.
What would settle it
DBPnet producing higher RMSE or MaxError than at least one baseline method when both are evaluated on the identical set of high-fidelity simulation runs or the same real-world vehicle experiment data.
Figures










read the original abstract
Advanced driver assistance systems (ADAS) play an important role in modern automotive intelligence, significantly enhancing vehicle safety and stability. The performance of ADAS critically relies on accurate and reliable vehicle state estimation, particularly from vehicle dynamic sensors. Among these signals, wheel load is a key variable for chassis control and safety-critical functions, yet it remains difficult to estimate robustly due to complex suspension geometry, nonlinear dynamics, and measurement noise. To address this issue, we propose DBPnet, a Bayesian physics-informed neural network (PINN) with a physics-aware embedding module inspired by damper characteristics. First, this paper presents a suspension linkage-level modeling (SLLM) approach that constructs a nonlinear instantaneous dynamic model by explicitly considering the complex geometric structure of the suspension. Building upon SLLM, Bayesian inference is integrated into the PINN to effectively cope with noise and uncertainty in the vehicle chassis system, thereby improving the model's robustness. Then, a physics-informed loss function is employed to ensure consistency with fundamental physical principles, while the damper characteristics-inspired embedding module extracts temporal variation features of input signals and incorporates them into each layer of the PINN, ensuring that physical observations guide the neural network without being constrained by fixed physical models. Extensive evaluations on high-fidelity simulations and real-world experiments demonstrate that our DBPnet consistently achieves lower RMSE and MaxError than baseline methods. These results highlight the potential of our DBPnet to advance wheel load estimation and contribute to the development of more reliable ADAS actuator functions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes DBPnet, a Bayesian physics-informed neural network (PINN) for wheel load estimation that incorporates a damper characteristics-inspired embedding module. It introduces a suspension linkage-level modeling (SLLM) approach to construct a nonlinear instantaneous dynamic model from explicit suspension geometry, integrates Bayesian inference to handle noise and uncertainty, employs a physics-informed loss for physical consistency, and claims that extensive evaluations on high-fidelity simulations and real-world experiments show consistently lower RMSE and MaxError than baseline methods.
Significance. If the SLLM produces an accurate nonlinear model and the physics-informed components demonstrably enforce the claimed physical principles beyond data-driven fitting, the approach could advance robust wheel load estimation for ADAS chassis control. The combination of Bayesian handling of uncertainty with a domain-inspired embedding module represents a targeted extension of PINNs to vehicle dynamics; however, the absence of explicit validation for the load-bearing SLLM assumption limits the assessed significance.
major comments (3)
- [SLLM description (abstract and §3)] The central performance claim (lower RMSE and MaxError on simulations and real experiments) is load-bearing on the accuracy of the SLLM nonlinear instantaneous dynamic model. The manuscript provides no explicit kinematic equations, derivation steps, or validation of SLLM outputs against multibody dynamics ground truth or sensitivity analysis, leaving open the possibility that reported gains arise from the embedding module or network capacity alone.
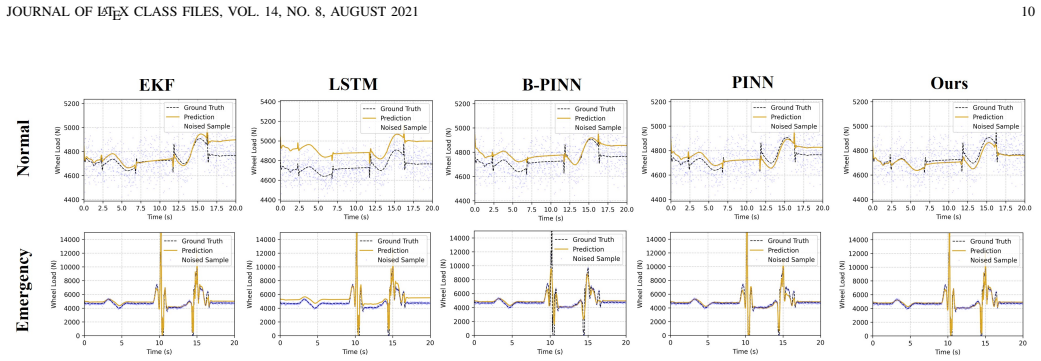
- [Abstract and evaluation sections] No quantitative results, tables, error bars, or statistical tests are supplied to support the abstract's assertion of lower RMSE and MaxError relative to baselines; the physics-informed loss is described at a high level without verification that it enforces the SLLM-derived principles rather than reducing to a data-fit term.
- [Bayesian inference integration] The Bayesian component is stated to cope with noise via priors, yet the manuscript does not report the specific priors, hyperparameter values, or posterior diagnostics, making it impossible to assess whether uncertainty quantification contributes to the claimed robustness or merely adds free parameters.
minor comments (2)
- [Method description] Notation for the damper characteristics-inspired embedding module should be defined with explicit input/output dimensions and layer integration equations for reproducibility.
- [Abstract] The abstract would benefit from a brief statement of the number of simulation scenarios and real-vehicle test conditions to contextualize the 'extensive evaluations'.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below, indicating where revisions will be made to improve clarity and rigor.
read point-by-point responses
-
Referee: [SLLM description (abstract and §3)] The central performance claim (lower RMSE and MaxError on simulations and real experiments) is load-bearing on the accuracy of the SLLM nonlinear instantaneous dynamic model. The manuscript provides no explicit kinematic equations, derivation steps, or validation of SLLM outputs against multibody dynamics ground truth or sensitivity analysis, leaving open the possibility that reported gains arise from the embedding module or network capacity alone.
Authors: We agree that explicit details are required to support the central claims. Although §3 outlines the SLLM approach, the manuscript does not include the full set of kinematic equations or validation. In the revised version we will insert the complete kinematic equations derived from suspension geometry, the step-by-step derivation, and direct comparisons of SLLM outputs against multibody-dynamics ground truth together with a sensitivity analysis. revision: yes
-
Referee: [Abstract and evaluation sections] No quantitative results, tables, error bars, or statistical tests are supplied to support the abstract's assertion of lower RMSE and MaxError relative to baselines; the physics-informed loss is described at a high level without verification that it enforces the SLLM-derived principles rather than reducing to a data-fit term.
Authors: The evaluation sections present comparative results through figures, yet we acknowledge the absence of tabulated values, error bars, and statistical tests. We will add tables listing RMSE and MaxError (with standard deviations from repeated trials), error bars, and appropriate statistical tests. We will also include an ablation study or diagnostic analysis demonstrating that the physics-informed loss enforces the SLLM-derived principles beyond pure data fitting. revision: yes
-
Referee: [Bayesian inference integration] The Bayesian component is stated to cope with noise via priors, yet the manuscript does not report the specific priors, hyperparameter values, or posterior diagnostics, making it impossible to assess whether uncertainty quantification contributes to the claimed robustness or merely adds free parameters.
Authors: We will expand the Bayesian-inference section to report the exact prior distributions, all hyperparameter values, and posterior diagnostics (e.g., convergence metrics or uncertainty quantification results) so that readers can evaluate the contribution of the Bayesian component. revision: yes
Circularity Check
No circularity: derivation relies on explicit geometric modeling and standard PINN components without reduction to inputs
full rationale
The paper's chain begins with SLLM as an explicit construction of the nonlinear dynamic model from suspension geometry (abstract), followed by integration of Bayesian inference, a physics-informed loss, and a damper-characteristics embedding module into the PINN. No equations or steps are quoted that reduce any prediction or result to a fitted parameter by construction, nor are self-citations used to justify uniqueness or import an ansatz. Performance claims rest on external evaluations against baselines on simulations and real experiments, which are independent of the modeling steps. This is the common case of a self-contained method description.
Axiom & Free-Parameter Ledger
free parameters (1)
- Bayesian priors or hyperparameters
axioms (1)
- domain assumption Suspension linkage geometry produces a nonlinear instantaneous dynamic model that can be explicitly constructed (SLLM).
invented entities (1)
-
Damper characteristics-inspired embedding module
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Wheel load estimation and anti-roll bar control using suspension analysis with neural network,
T. Zeng, T. Wang, L. Yu, Z. Liu, H. Chen, and X. Chen, “Wheel load estimation and anti-roll bar control using suspension analysis with neural network,” inIFToMM World Congress on Mechanism and Machine Science. Springer, 2023, pp. 332–342
2023
-
[2]
Analysis and design of suspension state observer for wheel load estimation,
T. Zeng, Z. Liu, C. He, Z. Zeng, H. Chen, F. Zhang, K. Fu, and X. Chen, “Analysis and design of suspension state observer for wheel load estimation,” SAE Technical Paper, Tech. Rep., 2024
2024
-
[3]
Kalman and extended kalman filters: Concept, derivation and properties,
M. I. Ribeiro, “Kalman and extended kalman filters: Concept, derivation and properties,”Institute for Systems and Robotics, vol. 43, no. 46, pp. 3736–3741, 2004
2004
-
[4]
The ensemble kalman filter: a signal processing perspective,
M. Roth, G. Hendeby, C. Fritsche, and F. Gustafsson, “The ensemble kalman filter: a signal processing perspective,”EURASIP Journal on Advances in Signal Processing, vol. 2017, no. 1, p. 56, 2017
2017
-
[5]
Ftekfnet: Hybridizing physical and data-driven estimation algorithms for vehicle state,
Y . Wang, F. Hu, C. Tian, P. Li, H. Huang, G. Yin, and C. Huang, “Ftekfnet: Hybridizing physical and data-driven estimation algorithms for vehicle state,”IEEE Transactions on Intelligent Vehicles, vol. 9, no. 11, pp. 7301–7311, 2024
2024
-
[6]
Physics-informed neural network for model prediction and dynamics parameter identification of collaborative robot joints,
X. Yang, Y . Du, L. Li, Z. Zhou, and X. Zhang, “Physics-informed neural network for model prediction and dynamics parameter identification of collaborative robot joints,”IEEE Robotics and Automation Letters, vol. 8, no. 12, pp. 8462–8469, 2023
2023
-
[7]
Vehicle state estimation combining physics-informed neural network and unscented kalman filtering on manifolds,
C. Tan, Y . Cai, H. Wang, X. Sun, and L. Chen, “Vehicle state estimation combining physics-informed neural network and unscented kalman filtering on manifolds,”Sensors, vol. 23, no. 15, p. 6665, 2023
2023
-
[8]
Hlcg: A hierarchical lane-changing gaming decision model for heterogeneous traffic flow on two-lane highways,
T. Wang, C. He, H. Li, Y . Li, Y . Xu, Y . Wang, and J. Jiao, “Hlcg: A hierarchical lane-changing gaming decision model for heterogeneous traffic flow on two-lane highways,”Transportation Research Record, vol. 2679, no. 10, pp. 449–469, 2025
2025
-
[9]
On the estimation rate of bayesian pinn for inverse problems,
Y . Sun, D. Mukherjee, and Y . Atchad ´e, “On the estimation rate of bayesian pinn for inverse problems,”arXiv preprint arXiv:2406.14808v1, 2024
-
[10]
Deep operator networks for bayesian parameter estimation in pdes,
A. Raj, S. Bun, K. Srinivasa, C. E. Gudumotou, and A. Sarshar, “Deep operator networks for bayesian parameter estimation in pdes,”Computer Physics Communications, p. 109853, 2025
2025
-
[11]
Physics-guided deep learning for dynamical systems: A survey,
R. Wang and R. Yu, “Physics-guided deep learning for dynamical systems: A survey,”ACM Computing Surveys, vol. 58, no. 5, pp. 1– 31, 2025
2025
-
[12]
Film: Visual reasoning with a general conditioning layer,
E. Perez, F. Strub, H. De Vries, V . Dumoulin, and A. Courville, “Film: Visual reasoning with a general conditioning layer,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 32, no. 1, 2018. JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2021 13
2018
-
[13]
Physics-informed neural networks for pde problems: A comprehensive review,
K. Luo, J. Zhao, Y . Wang, J. Li, J. Wen, J. Liang, H. Soekmadji, and S. Liao, “Physics-informed neural networks for pde problems: A comprehensive review,”Artificial Intelligence Review, vol. 58, no. 10, p. 323, 2025
2025
-
[14]
Bayesian neural networks,
I. Kononenko, “Bayesian neural networks,”Biological Cybernetics, vol. 61, no. 5, pp. 361–370, 1989
1989
-
[15]
A bayesian approach for parameter estimation with uncertainty for dynamic power systems,
N. Petra, C. G. Petra, Z. Zhang, E. M. Constantinescu, and M. Anitescu, “A bayesian approach for parameter estimation with uncertainty for dynamic power systems,”IEEE Transactions on Power Systems, vol. 32, no. 4, pp. 2735–2745, 2017
2017
-
[16]
A theoretically grounded application of dropout in recurrent neural networks,
Y . Gal and Z. Ghahramani, “A theoretically grounded application of dropout in recurrent neural networks,”Advances in Neural Information Processing Systems, vol. 29, 2016
2016
-
[17]
B-pinns: Bayesian physics- informed neural networks for forward and inverse pde problems with noisy data,
L. Yang, X. Meng, and G. E. Karniadakis, “B-pinns: Bayesian physics- informed neural networks for forward and inverse pde problems with noisy data,”Journal of Computational Physics, vol. 425, p. 109913, 2021
2021
-
[18]
Improvement of bayesian pinn training convergence in solving multi-scale pdes with noise,
Y . Hou, X. Li, and J. Wu, “Improvement of bayesian pinn training convergence in solving multi-scale pdes with noise,”arXiv preprint arXiv:2408.09340, 2024
-
[19]
A new approach to linear filtering and prediction problems,
R. E. Kalmanet al., “A new approach to linear filtering and prediction problems,”Journal of Basic Engineering, vol. 82, no. 1, pp. 35–45, 1960
1960
-
[20]
The unscented kalman filter for nonlinear estimation,
E. A. Wan and R. Van Der Merwe, “The unscented kalman filter for nonlinear estimation,” inProceedings of the IEEE Adaptive Systems for Signal Processing, Communications, and Control Symposium. IEEE, 2000, pp. 153–158
2000
-
[21]
Kfd-nerf: Rethinking dynamic nerf with kalman filter,
Y . Zhan, Z. Li, M. Niu, Z. Zhong, S. Nobuhara, K. Nishino, and Y . Zheng, “Kfd-nerf: Rethinking dynamic nerf with kalman filter,” in European Conference on Computer Vision. Springer, 2024, pp. 1–18
2024
-
[22]
An un- scented kalman filter-informed neural network for vehicle sideslip angle estimation,
A. Bertipaglia, M. Alirezaei, R. Happee, and B. Shyrokau, “An un- scented kalman filter-informed neural network for vehicle sideslip angle estimation,”IEEE Transactions on Vehicular Technology, vol. 73, no. 9, pp. 12 731–12 746, 2024
2024
-
[23]
Rkfnet: A novel neural network aided robust kalman filter,
P. Hao, O. Karakus ¸, and A. Achim, “Rkfnet: A novel neural network aided robust kalman filter,”Signal Processing, vol. 230, p. 109856, 2025
2025
-
[24]
Estimation of dynamic tire force by measurement of vehicle body responses with numerical and experimental validation,
H. Wang, T. Nagayama, and D. Su, “Estimation of dynamic tire force by measurement of vehicle body responses with numerical and experimental validation,”Mechanical Systems and Signal Processing, vol. 123, pp. 369–385, 2019
2019
-
[25]
Kalmannet: Neural network aided kalman filtering for partially known dynamics,
G. Revach, N. Shlezinger, X. Ni, A. L. Escoriza, R. J. Van Sloun, and Y . C. Eldar, “Kalmannet: Neural network aided kalman filtering for partially known dynamics,”IEEE Transactions on Signal Processing, vol. 70, pp. 1532–1547, 2022
2022
-
[26]
Latent-kalmannet: Learned kalman filtering for tracking from high-dimensional signals,
I. Buchnik, G. Revach, D. Steger, R. J. Van Sloun, T. Routtenberg, and N. Shlezinger, “Latent-kalmannet: Learned kalman filtering for tracking from high-dimensional signals,”IEEE Transactions on Signal Processing, vol. 72, pp. 352–367, 2023
2023
-
[27]
Gsp-kalmannet: Tracking graph signals via neural- aided kalman filtering,
I. Buchnik, G. Sagi, N. Leinwand, Y . Loya, N. Shlezinger, and T. Routtenberg, “Gsp-kalmannet: Tracking graph signals via neural- aided kalman filtering,”IEEE Transactions on Signal Processing, 2024
2024
-
[28]
Maml- kalmannet: A neural network-assisted kalman filter based on model- agnostic meta-learning,
S. Chen, Y . Zheng, D. Lin, P. Cai, Y . Xiao, and S. Wang, “Maml- kalmannet: A neural network-assisted kalman filter based on model- agnostic meta-learning,”IEEE Transactions on Signal Processing, 2025
2025
-
[29]
Bayesian kalmannet: quantifying uncertainty in deep learning augmented kalman filter,
Y . Dahan, G. Revach, J. Dunik, and N. Shlezinger, “Bayesian kalmannet: quantifying uncertainty in deep learning augmented kalman filter,”IEEE Transactions on Signal Processing, 2025
2025
-
[30]
Achieving high accuracy with pinns via energy natural gradient descent,
J. M ¨uller and M. Zeinhofer, “Achieving high accuracy with pinns via energy natural gradient descent,” inProceedings of the International Conference on Machine Learning, N. Hansen, Ed. Honolulu, Hawaii, USA: PMLR, 2023, pp. 1234–1245
2023
-
[31]
Conservative physics-informed neural networks on discrete domains for conservation laws: Applications to forward and inverse problems,
A. D. Jagtap, E. Kharazmi, and G. E. Karniadakis, “Conservative physics-informed neural networks on discrete domains for conservation laws: Applications to forward and inverse problems,”Computer Methods in Applied Mechanics and Engineering, vol. 365, p. 113028, 2020
2020
-
[32]
npinns: Nonlocal physics-informed neural networks for a parametrized nonlocal universal laplacian operator. algorithms and applications,
G. Pang, M. D’Elia, M. Parks, and G. E. Karniadakis, “npinns: Nonlocal physics-informed neural networks for a parametrized nonlocal universal laplacian operator. algorithms and applications,”Journal of Computa- tional Physics, vol. 422, p. 109760, 2020
2020
-
[33]
Adaptive Physics-Informed Neural Networks for Markov- Chain Monte Carlo,
M. A. Nabian and H. Meidani, “Adaptive physics-informed neural net- works for markov-chain monte carlo,”arXiv preprint arXiv:2008.01604, 2020
-
[34]
Physics-informed deep learning for traffic state estimation: A hybrid paradigm informed by second-order traffic models,
R. Shi, Z. Mo, and X. Di, “Physics-informed deep learning for traffic state estimation: A hybrid paradigm informed by second-order traffic models,” inProceedings of the AAAI Conference on Artificial Intelli- gence, vol. 35, no. 1, 2021, pp. 540–547
2021
-
[35]
A physics- informed neural network for the prediction of unmanned surface vehicle dynamics,
P.-F. Xu, C.-B. Han, H.-X. Cheng, C. Cheng, and T. Ge, “A physics- informed neural network for the prediction of unmanned surface vehicle dynamics,”Journal of Marine Science and Engineering, vol. 10, no. 2, p. 148, 2022
2022
-
[36]
Ev-pinn: A physics- informed neural network for predicting electric vehicle dynamics,
H. Lim, J. W. Lee, J. Boyack, and J. B. Choi, “Ev-pinn: A physics- informed neural network for predicting electric vehicle dynamics,” in IEEE International Conference on Robotics and Automation. Atlanta, USA: IEEE, 2025, pp. 1–7
2025
-
[37]
Adaptive construction of surrogates for the bayesian solution of inverse problems,
J. Li and Y . M. Marzouk, “Adaptive construction of surrogates for the bayesian solution of inverse problems,”SIAM Journal on Scientific Computing, vol. 36, no. 3, pp. A1163–A1186, 2014
2014
-
[38]
Quality of Uncertainty Quantification for Bayesian Neural Network Inference
J. Yao, W. Pan, S. Ghosh, and F. Doshi-Velez, “Quality of uncertainty quantification for bayesian neural network inference,”arXiv preprint arXiv:1906.09686, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1906
-
[39]
Efficient bayesian physics informed neural networks for inverse problems via ensemble kalman inversion,
A. Pensoneault and X. Zhu, “Efficient bayesian physics informed neural networks for inverse problems via ensemble kalman inversion,”Journal of Computational Physics, vol. 508, p. 113006, 2024
2024
-
[40]
Bayesian physics informed neural networks for real-world nonlinear dynamical systems,
K. Linka, A. Sch ¨afer, X. Meng, Z. Zou, G. E. Karniadakis, and E. Kuhl, “Bayesian physics informed neural networks for real-world nonlinear dynamical systems,”Computer Methods in Applied Mechanics and Engineering, vol. 402, p. 115346, 2022
2022
-
[41]
Bayesian physics-informed neural networks for system identification of inverter- dominated power systems,
S. Stock, D. Babazadeh, C. Becker, and S. Chatzivasileiadis, “Bayesian physics-informed neural networks for system identification of inverter- dominated power systems,”Electric Power Systems Research, vol. 235, no. 110860, 2024
2024
-
[42]
Efficient bayesian inference using physics-informed invertible neural networks for inverse problems,
X. Guan, X. Wang, H. Wu, Z. Yang, and P. Yu, “Efficient bayesian inference using physics-informed invertible neural networks for inverse problems,”Machine Learning: Science and Technology, vol. 5, no. 035026, 2024
2024
-
[43]
Surrogate modeling for bayesian inverse problems based on physics-informed neural networks,
Y . Li, Y . Wang, and L. Yan, “Surrogate modeling for bayesian inverse problems based on physics-informed neural networks,”Journal of Com- putational Physics, vol. 475, no. 111841, 2023
2023
-
[44]
Physics-informed bayesian neural networks for solving phonon boltzmann transport equation in forward and inverse problems with sparse and noisy data,
R. Li, J. Zhou, J.-X. Wang, and T. Luo, “Physics-informed bayesian neural networks for solving phonon boltzmann transport equation in forward and inverse problems with sparse and noisy data,”ASME Journal of Heat and Mass Transfer, vol. 147, no. 3, p. 032501, 2025
2025
-
[45]
Literature review and funda- mental approaches for vehicle and tire state estimation,
K. B. Singh, M. A. Arat, and S. Taheri, “Literature review and funda- mental approaches for vehicle and tire state estimation,”Vehicle System Dynamics, 2019
2019
-
[46]
Tire normal force estimation using artificial neural networks and fuzzy classifiers: Experi- mental validation,
A. H. Salari, H. Mirzaeinejad, and M. F. Mahani, “Tire normal force estimation using artificial neural networks and fuzzy classifiers: Experi- mental validation,”Applied Soft Computing, vol. 132, p. 109835, 2023
2023
-
[47]
Multi-class optimal margin distribution ma- chine,
T. Zhang and Z. Zhou, “Multi-class optimal margin distribution ma- chine,” inProceedings of the International Conference on Machine Learning. PMLR, 2017, pp. 4063–4071
2017
-
[48]
Hy- brid state estimation combining artificial neural network and physical model,
P. M. Sieberg, S. Blume, N. Harnack, N. Maas, and D. Schramm, “Hy- brid state estimation combining artificial neural network and physical model,” inIEEE Intelligent Transportation Systems Conference. IEEE, 2019, pp. 894–899
2019
-
[49]
Challenges in training pinns: A loss landscape perspective,
P. Rathore, W. Lei, Z. Frangella, L. Lu, and M. Udell, “Challenges in training pinns: A loss landscape perspective,” inProceedings of the International Conference on Machine Learning. Vienna, Austria: PMLR, 2024, pp. 1–13
2024
-
[50]
Physics-informed machine learning,
G. E. Karniadakiset al., “Physics-informed machine learning,”Nature Reviews Physics, vol. 3, no. 6, pp. 422–430, 2021
2021
-
[51]
Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations,
M. Raissi, P. Perdikaris, and G. E. Karniadakis, “Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations,” Journal of Computational physics, vol. 378, pp. 686–707, 2019
2019
-
[52]
A dynamic wheel load measurement system for the formula student race car,
T. Zeng, Z. Liu, H. Chen, and X. Chen, “A dynamic wheel load measurement system for the formula student race car,” inInternational Conference on Electromechanical Control Technology and Transporta- tion, vol. 12790. SPIE, 2023, pp. 94–104
2023
-
[53]
Pacejka,Tire and vehicle dynamics
H. Pacejka,Tire and vehicle dynamics. Elsevier, 2005
2005
-
[54]
Bayesian methods for neural networks: Theory and applications,
D. J. MacKayet al., “Bayesian methods for neural networks: Theory and applications,”Course notes for Neural Networks Summer School, 1995
1995
-
[55]
Weight uncertainty in neural network,
C. Blundell, J. Cornebise, K. Kavukcuoglu, and D. Wierstra, “Weight uncertainty in neural network,” inProceedings of the International Conference on Machine Learning. PMLR, 2015, pp. 1613–1622
2015
-
[56]
Quantifying total uncertainty in physics-informed neural networks for solving forward and inverse stochastic problems,
D. Zhang, L. Lu, L. Guo, and G. E. Karniadakis, “Quantifying total uncertainty in physics-informed neural networks for solving forward and inverse stochastic problems,”Journal of Computational Physics, vol. 397, no. 108850, 2019
2019
-
[57]
Vehicle trajectory prediction based on lstm recurrent neural networks,
A. Ip, L. Irio, and R. Oliveira, “Vehicle trajectory prediction based on lstm recurrent neural networks,” inIEEE Vehicular Technology Conference. IEEE, 2021, pp. 1–5. JOURNAL OF LATEX CLASS FILES, VOL. 14, NO. 8, AUGUST 2021 14 VII. BIOGRAPHY Tianyi Wangis currently a Ph.D. student at the Department of Civil, Architectural, and Environmental Engineering, ...
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.