LiftNav: Path Planning via Semantic Lifting in TSDF-Guided Gaussian Splatting
Pith reviewed 2026-06-28 22:32 UTC · model grok-4.3
The pith
LiftNav achieves 100% feasible and shorter robot trajectories by lifting 2D detections into a TSDF-Gaussian Splatting map.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
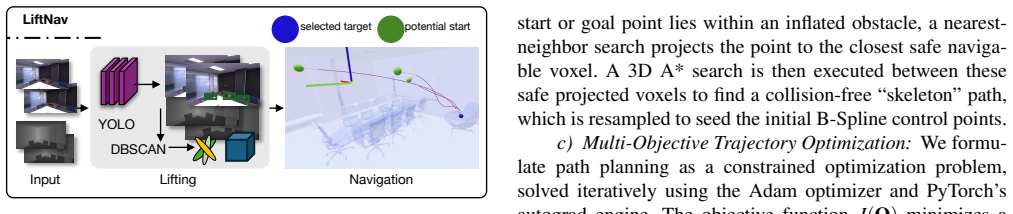
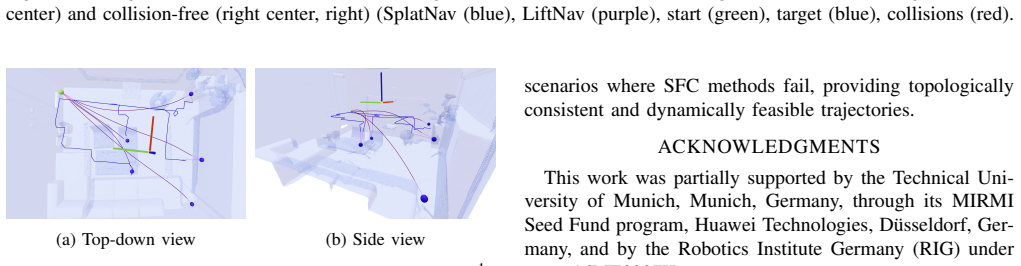
LiftNav augments GSFusion's TSDF+GS dual map with a real-time pipeline of YOLO-based detection, TSDF-based 3D lifting, and B-spline trajectory optimization using a hinge-loss-based collision penalty. This enables flexible semantic navigation in unknown indoor environments. In Replica dataset simulations, it achieves a 100% feasibility rate and shorter trajectories compared to a state-of-the-art radiance field baseline.
What carries the argument
The TSDF-based lifting of 2D YOLO detections to 3D semantics within the dual map, paired with the hinge-loss collision penalty during B-spline optimization.
Load-bearing premise
The GSFusion TSDF plus Gaussian Splatting map already supplies sufficiently accurate geometry and that 2D YOLO detections lift reliably into 3D without large localization errors.
What would settle it
A test in simulation or reality where lifted 3D object positions are deliberately offset from ground truth by more than the safety margin and the resulting trajectories are checked for actual collisions.
Figures

read the original abstract
Autonomous robots in unknown indoor environments require both reliable collision avoidance and object-level understanding. Classical representations such as TSDF support safe planning but lack semantics, while photorealistic methods like Gaussian Splatting (GS) provide rich appearance yet suffer from soft geometry, limiting precise obstacle avoidance. We present LiftNav, a hybrid navigation framework built on GSFusion's TSDF+GS dual map, augmented with a real-time pipeline of YOLO-based detection, TSDF-based 3D lifting, and B-spline trajectory optimization. This design enables flexible semantic navigation without dense 3D embeddings. We further introduce a hinge-loss-based collision penalty that improves trajectory smoothness and safety. We evaluate our approach in a simulation using the Replica dataset. Compared against a state-of-the-art radiance field baseline we show a 100% feasibility rate and shorter trajectories.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents LiftNav, a hybrid navigation framework that augments GSFusion's TSDF+GS dual map with real-time YOLO-based 2D detection, TSDF-based 3D lifting of semantics, and B-spline trajectory optimization using a hinge-loss collision penalty. It claims this enables semantic navigation without dense 3D embeddings and reports a 100% feasibility rate with shorter trajectories versus a state-of-the-art radiance-field baseline, evaluated in simulation on the Replica dataset.
Significance. If the empirical claims hold under proper validation, the method could provide a practical route to object-level semantic planning that retains the precise geometry of TSDF while adding semantics via lightweight lifting, avoiding the need for dense 3D embeddings or purely soft GS geometry.
major comments (2)
- [Abstract / Evaluation] Abstract and Evaluation section: the central claim of a '100% feasibility rate and shorter trajectories' versus the radiance-field baseline supplies no quantitative details on baseline implementation, number of trials, environment variations, statistical significance, or success criteria, and is limited to simulation on a single dataset; this directly undermines assessment of the headline result.
- [Method (lifting and optimization)] Method description (B-spline optimization and collision penalty): the hinge-loss collision term is derived from TSDF-lifted 3D YOLO detections, yet no measurement of 3D lifting error, ablation on detection noise, or sensitivity analysis of how localization error affects the reported feasibility rate is provided; this is load-bearing because inaccurate lifted points would mis-specify free space and invalidate the safety claims.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each point below and will revise the manuscript to provide the requested details and analyses.
read point-by-point responses
-
Referee: [Abstract / Evaluation] Abstract and Evaluation section: the central claim of a '100% feasibility rate and shorter trajectories' versus the radiance-field baseline supplies no quantitative details on baseline implementation, number of trials, environment variations, statistical significance, or success criteria, and is limited to simulation on a single dataset; this directly undermines assessment of the headline result.
Authors: We agree that the abstract and evaluation section would benefit from additional quantitative details. In the revised manuscript we will expand the evaluation section to specify the baseline implementation (including any adaptations made to the radiance-field method), the exact number of trials and environment variations tested, the definition of feasibility and success criteria, and any statistical significance testing performed. We will also add an explicit discussion of the simulation-only limitation on the Replica dataset. revision: yes
-
Referee: [Method (lifting and optimization)] Method description (B-spline optimization and collision penalty): the hinge-loss collision term is derived from TSDF-lifted 3D YOLO detections, yet no measurement of 3D lifting error, ablation on detection noise, or sensitivity analysis of how localization error affects the reported feasibility rate is provided; this is load-bearing because inaccurate lifted points would mis-specify free space and invalidate the safety claims.
Authors: We concur that empirical validation of the lifting step is necessary to support the safety claims. The revised manuscript will include quantitative measurements of 3D lifting error against ground truth in simulation, an ablation study varying detection noise levels, and a sensitivity analysis examining the impact of localization error on the reported feasibility rate and trajectory metrics. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper describes an engineering pipeline (YOLO detection, TSDF-based 3D lifting into GSFusion dual map, B-spline optimization with hinge-loss collision penalty) whose central claims are empirical performance numbers on the Replica dataset. No equations define a quantity in terms of itself, no fitted parameters are relabeled as predictions, and no self-citation chain is invoked to justify uniqueness or force the reported feasibility rate. The method is self-contained as an independent composition of existing components evaluated against an external baseline.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Splat-nav: Safe real-time robot navigation in gaussian splatting maps,
T. Chen et al., “Splat-nav: Safe real-time robot navigation in gaussian splatting maps,”IEEE Transactions on Robotics,
-
[2]
Semantically safe robot manipulation: From semantic scene understanding to motion safeguards,
L. Brunke et al., “Semantically safe robot manipulation: From semantic scene understanding to motion safeguards,”IEEE Robotics and Automation Letters, 2025
2025
-
[3]
Where did i leave my glasses? open- vocabulary semantic exploration in real-world semi-static environ- ments,
B. Bogenberger et al., “Where did i leave my glasses? open- vocabulary semantic exploration in real-world semi-static environ- ments,”IEEE Robotics and Automation Letters, 2026
2026
-
[4]
Schieber et al.,Core-gs: Coarse-to-refined gaussian splatting with semantic object focus, 2025
H. Schieber et al.,Core-gs: Coarse-to-refined gaussian splatting with semantic object focus, 2025. arXiv:2509.04859 [cs.CV]. [Online]. Available:https://arxiv.org/abs/2509.04859
-
[5]
Activegs: Active scene reconstruction using gaussian splatting,
L. Jin, X. Zhong, Y . Pan, J. Behley, C. Stachniss, and M. Popovi ´c, “Activegs: Active scene reconstruction using gaussian splatting,” IEEE Robotics and Automation Letters, 2025
2025
-
[6]
Gsfusion: Online rgb-d mapping where gaussian splatting meets tsdf fusion,
J. Wei and S. Leutenegger, “Gsfusion: Online rgb-d mapping where gaussian splatting meets tsdf fusion,”IEEE Robotics and Automation Letters, vol. 9, no. 12, pp. 11 865–11 872, 2024
2024
-
[7]
Vision-only robot navigation in a neural radiance world,
M. Adamkiewicz et al., “Vision-only robot navigation in a neural radiance world,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 4606–4613, 2022
2022
-
[8]
Gaussnav: Gaussian splatting for visual navigation,
X. Lei, M. Wang, W. Zhou, and H. Li, “Gaussnav: Gaussian splatting for visual navigation,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 47, no. 5, pp. 4108–4121, 2025
2025
-
[9]
Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3d,
J. Philion and S. Fidler, “Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3d,” inEuropean conference on computer vision, Springer, 2020, pp. 194–210
2020
-
[10]
SAM 3: Segment Anything with Concepts
N. Carion et al., “Sam 3: Segment anything with concepts,”arXiv preprint arXiv:2511.16719, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[11]
Jocher, J
G. Jocher, J. Qiu, and A. Chaurasia,Ultralytics YOLO, version 8.0.0, Jan. 2023. [Online]. Available:https : / / github . com / ultralytics/ultralytics
2023
-
[12]
A density-based algorithm for discovering clusters in large spatial databases with noise,
M. Ester, H.-P. Kriegel, J. Sander, X. Xu, et al., “A density-based algorithm for discovering clusters in large spatial databases with noise,” inkdd, vol. 96, 1996, pp. 226–231
1996
-
[13]
The Replica Dataset: A Digital Replica of Indoor Spaces
J. Straub et al., “The replica dataset: A digital replica of indoor spaces,”arXiv preprint arXiv:1906.05797,
work page internal anchor Pith review Pith/arXiv arXiv 1906
-
[14]
Nerfstudio: A modular framework for neural radiance field development,
M. Tancik et al., “Nerfstudio: A modular framework for neural radiance field development,” inACM SIGGRAPH 2023 conference proceedings, 2023, pp. 1–12
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.