Hybrid Dynamics Modeling for a Flexible 2-DoF Robotic Arm
Pith reviewed 2026-06-28 10:15 UTC · model grok-4.3
The pith
Hybrid rigid-body plus residual models and data-driven regression outperform published physics parameters for torque prediction on a flexible 2-DoF arm.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
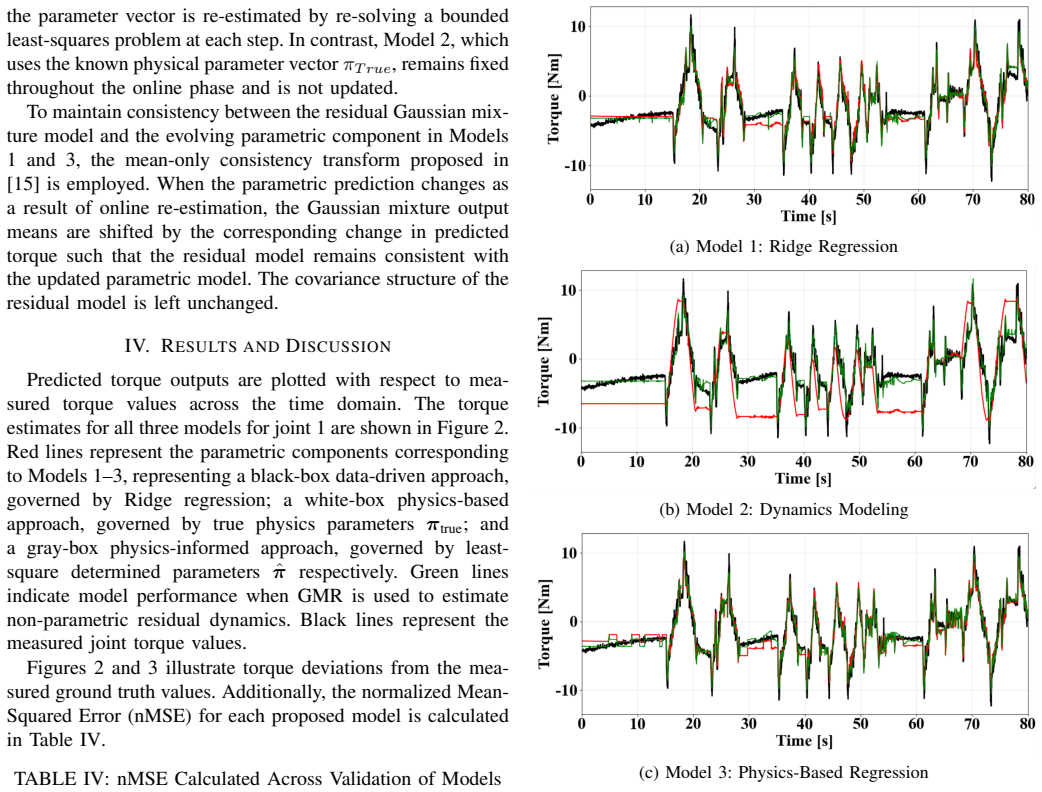
The authors establish that rigid-body dynamics parameters taken from published specifications produce the poorest torque predictions for a flexible-link 2-DoF arm, while ordinary least-squares re-estimation of the identical parameter set and ridge regression on kinematic features both yield substantially lower errors and closer alignment with measured torques. Adding Gaussian Mixture Models to the rigid-body formulation to capture residual dynamics further illustrates the value of data-informed corrections. Residual analysis confirms that unmodeled flexibility and other errors remain after parametric fitting alone, supporting the development of hybrid physics-plus-residual methods.
What carries the argument
Comparison of rigid-body dynamics (RBD) formulations augmented by Gaussian Mixture Models (GMM) for residuals against a kinematics-based regression baseline and against direct least-squares or ridge estimation of RBD parameters from data.
If this is right
- Regularization and data-driven parameter fitting improve torque accuracy over fixed physics specifications for flexible-link arms.
- Purely parametric rigid-body models leave residual errors traceable to linkage flexibility that hybrid GMM corrections address.
- Kinematics-based regression serves as an effective data-driven reference that matches measured torques more closely than specification-based parameters.
- The observed limitations of parametric models alone encourage semi-parametric residual learning for dynamics identification.
Where Pith is reading between the lines
- The same hybrid construction could be tested on arms with three or more degrees of freedom to check whether residual GMM capacity scales with added flexibility modes.
- Embedding the learned GMM residuals inside a real-time controller would allow direct measurement of whether torque accuracy gains translate into improved tracking or reduced vibration.
- If similar open datasets become available for other flexible mechanisms, the ranking of physics-only versus regularized estimators could be checked for consistency across hardware.
Load-bearing premise
The open-source dataset supplies sufficient motion excitation and measurement quality to reveal performance gaps between the rigid-body baseline and the hybrid or regression models without sensor noise or uncharacterized flexibility modes masking the differences.
What would settle it
Running the identical torque-prediction comparison on a second dataset collected from the same arm under higher noise, lower excitation, or different payload conditions where the published physics parameters achieve equal or lower error than the regularized and least-squares estimators.
Figures






read the original abstract
This paper examines three approaches for modeling the dynamics of a flexible-link 2-DoF robotic arm to address unmodeled dynamics not captured by rigid-body models. Two physics informed models combine rigid-body dynamics (RBD) formulations with a Gaussian Mixture Model (GMM) to capture residual model errors and linkage flexibility. A kinematics-based regression model serves as a purely data-driven baseline. Using an open-source dataset, torque predictions are first estimated using Ridge regression on kinematic features, while the physicsbased baseline is constructed from published specifications, and ordinary least-squares regression is subsequently used to estimate the same parameter set directly from data. Results show that the physics-based parameters yield the poorest accuracy, while regularized and least-squares estimators align more closely with measured torques. Residual analysis and error metrics highlight the limitations of purely parametric models for flexible-link systems and underscore the value of regularization and data-driven identification, supporting developments of semi-parametric residual learning methods.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper examines hybrid dynamics modeling for a flexible 2-DoF robotic arm by combining rigid-body dynamics (RBD) formulations with Gaussian Mixture Models (GMM) to capture residual errors and linkage flexibility. It also considers a kinematics-based Ridge regression baseline and ordinary least-squares (OLS) estimation of RBD parameters. Using an open-source dataset, torque predictions are compared, with the claim that published physics-based parameters yield the poorest accuracy while regularized and least-squares estimators perform better, highlighting limitations of purely parametric models and the value of data-driven methods.
Significance. The topic of handling unmodeled flexibility via semi-parametric residual learning is relevant to robotics. Reproducibility is aided by the open-source dataset. However, the significance is limited because the reported results do not demonstrate the performance of the proposed RBD+GMM hybrids and the comparison setup does not isolate the contribution of hybrid modeling from the effects of parameter fitting.
major comments (3)
- [Abstract] Abstract: The manuscript states that two physics-informed RBD+GMM models are examined, yet the reported torque-prediction results only cover the untuned published RBD parameters, Ridge regression on kinematics, and OLS on the RBD parameter set; no accuracy metrics or residual analysis are supplied for the hybrid models themselves.
- [Abstract] Abstract / results paragraph: The central claim that physics-based parameters yield the poorest accuracy is based on a comparison between untuned published specifications and explicitly fitted models (Ridge and OLS); this asymmetry means the accuracy gap primarily reflects the benefit of data-driven calibration rather than the hybrid GMM residual modeling or flexibility handling.
- [Abstract] Abstract: No quantitative error metrics (e.g., RMSE or torque prediction errors), statistical tests, GMM component count, ridge lambda selection procedure, or train/test partitioning details are provided to support the comparative outcomes or residual analysis.
minor comments (1)
- The abstract could more precisely state which of the three approaches were actually included in the torque-prediction comparison.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight important issues in how the abstract presents the hybrid models and the comparisons. We address each point below and will revise the manuscript to provide clearer results for the RBD+GMM hybrids, better isolate their contributions, and include the requested quantitative and methodological details.
read point-by-point responses
-
Referee: [Abstract] Abstract: The manuscript states that two physics-informed RBD+GMM models are examined, yet the reported torque-prediction results only cover the untuned published RBD parameters, Ridge regression on kinematics, and OLS on the RBD parameter set; no accuracy metrics or residual analysis are supplied for the hybrid models themselves.
Authors: We acknowledge that the abstract does not include accuracy metrics or residual analysis for the two RBD+GMM hybrid models. While the full manuscript defines these hybrids and their role in capturing residual errors due to flexibility, the abstract emphasizes the baseline comparisons. We will revise the abstract to report key torque prediction results for the hybrid models and ensure the results section provides explicit metrics and analysis for all approaches. revision: yes
-
Referee: [Abstract] Abstract / results paragraph: The central claim that physics-based parameters yield the poorest accuracy is based on a comparison between untuned published specifications and explicitly fitted models (Ridge and OLS); this asymmetry means the accuracy gap primarily reflects the benefit of data-driven calibration rather than the hybrid GMM residual modeling or flexibility handling.
Authors: The referee correctly notes that the reported comparison primarily demonstrates the value of data-driven parameter fitting over published specifications. To better highlight the hybrid modeling contribution, we will revise the manuscript to include direct comparisons between the fitted RBD model and the RBD+GMM hybrids. This will isolate the incremental benefit of the GMM residual term for handling unmodeled flexibility. revision: yes
-
Referee: [Abstract] Abstract: No quantitative error metrics (e.g., RMSE or torque prediction errors), statistical tests, GMM component count, ridge lambda selection procedure, or train/test partitioning details are provided to support the comparative outcomes or residual analysis.
Authors: The abstract is intentionally concise and does not contain the full quantitative details or hyperparameter selection procedures, which appear in the methods and results sections. However, to improve clarity and address the concern, we will add representative error metrics to the abstract and expand the methods section with explicit information on GMM component count, ridge lambda selection, train/test partitioning, and any statistical tests used. revision: yes
Circularity Check
No circularity: empirical model comparison contains no self-referential derivations or fitted predictions.
full rationale
The paper conducts an empirical comparison of torque prediction accuracy across three modeling approaches on an open-source dataset: untuned physics-based rigid-body parameters from published specifications, Ridge regression on kinematic features, and OLS regression on the rigid-body parameter set. No derivation chain, first-principles result, or prediction is claimed that algebraically reduces to its own inputs by construction. The highlighted result (physics parameters poorest, data-driven estimators better) follows directly from applying each method to the same measured torques without any self-definitional loop, fitted-input-renamed-as-prediction, or load-bearing self-citation. The hybrid RBD+GMM models are described but the reported ordering does not rely on any internal reduction to the fitted quantities themselves. This is a standard empirical benchmarking setup with no evidence of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
free parameters (3)
- Rigid-body dynamic parameters
- GMM component parameters
- Ridge regression regularization strength
axioms (2)
- domain assumption Rigid-body dynamics equations provide a usable base model whose residuals can be modeled by a GMM
- standard math Ordinary least squares yields the minimum-variance unbiased estimator under standard assumptions
Reference graph
Works this paper leans on
-
[1]
Review on modeling and control of flexible link manipulators,
D. Subedi, I. Tyapin, and G. Hovland, “Review on modeling and control of flexible link manipulators,”Modeling, Identification and Control: A Norwegian Research Bulletin, vol. 41, pp. 141–163, 01 2020
2020
-
[2]
MERIt – a multi-elastic-link robot identi- fication dataset
J. Malzahn and T. Bertram, “MERIt – a multi-elastic-link robot identi- fication dataset.” Institute of Control Theory and Systems Engineering (RST), TU Dortmund, Germany, 2014
2014
-
[3]
Fractional order strain feedback for oscillation damping of a multi-elastic-link arm under gravity,
J. Malzahn and T. Bertram, “Fractional order strain feedback for oscillation damping of a multi-elastic-link arm under gravity,” in41st International Symposium on Robotics, pp. 1–8, 2014
2014
-
[4]
Input shaping and strain gauge feedback vibration control of an elastic robotic arm,
J. Malzahn, M. Ruderman, A. S. Phung, F. Hoffmann, and T. Bertram, “Input shaping and strain gauge feedback vibration control of an elastic robotic arm,” in2010 Conference on Control and Fault-Tolerant Systems (SysTol), pp. 672–677, 2010
2010
-
[5]
Dynamics identification of a damped multi elastic link robot arm under gravity,
J. Malzahn, R. F. Reinhart, and T. Bertram, “Dynamics identification of a damped multi elastic link robot arm under gravity,” in2014 IEEE International Conference on Robotics and Automation (ICRA), pp. 2170–2175, 2014
2014
-
[6]
Observation of link defor- mations of a robotic manipulator with fiber bragg grating sensors,
R. Franke, F. Hoffmann, and T. Bertram, “Observation of link defor- mations of a robotic manipulator with fiber bragg grating sensors,” in2008 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 90–95, 2008
2008
-
[7]
Closed-form control oriented model of highly flexible manipulators,
B. Scaglioni, L. Bascetta, M. Baur, and G. Ferretti, “Closed-form control oriented model of highly flexible manipulators,”Applied Mathematical Modelling, vol. 52, pp. 174–185, 2017
2017
-
[8]
Data-driven inverse dynam- ics modeling using neural-networks and regression-based techniques,
M. Pikuli ´nski, P. Malczyk, and R. Aarts, “Data-driven inverse dynam- ics modeling using neural-networks and regression-based techniques,” Multibody System Dynamics, vol. 63, pp. 341–366, 2025
2025
-
[9]
Combining physics and deep learning to learn continuous-time dynamics models,
M. Lutter and J. Peters, “Combining physics and deep learning to learn continuous-time dynamics models,”The International Journal of Robotics Research, vol. 42, no. 3, pp. 83–107, 2023
2023
-
[10]
Using model knowledge for learning inverse dynamics,
D. Nguyen-Tuong and J. Peters, “Using model knowledge for learning inverse dynamics,” in2010 IEEE International Conference on Robotics and Automation, pp. 2677–2682, 2010
2010
-
[11]
Incremental local online gaussian mixture regression for imitation learning of multiple tasks,
T. Cederborg, M. Li, A. Baranes, and P.-Y . Oudeyer, “Incremental local online gaussian mixture regression for imitation learning of multiple tasks,” in2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 267–274, 2010
2010
-
[12]
Model learning with local gaussian process regression,
D. Nguyen-Tuong, M. Seeger, and J. Peters, “Model learning with local gaussian process regression,”Advanced Robotics, vol. 23, pp. 2015– 2034, 10 2009
2015
-
[13]
Derivative-free online learning of inverse dynamics models,
D. Romeres, M. Zorzi, R. Camoriano, S. Traversaro, and A. Chiuso, “Derivative-free online learning of inverse dynamics models,” 02 2019
2019
-
[14]
A framework for evalu- ating approximation methods for gaussian process regression,
K. Chalupka, M. Christopher, and I. Murray, “A framework for evalu- ating approximation methods for gaussian process regression,”Journal of Machine Learning Research, vol. 14, pp. 333–350, Jan. 2013
2013
-
[15]
Online simultaneous semi-parametric dynamics model learning,
J. Smith and M. Mistry, “Online simultaneous semi-parametric dynamics model learning,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2039–2046, 2020
2039
-
[16]
Scalable and incremental learning of gaussian mixture models,
R. Pinto and P. Engel, “Scalable and incremental learning of gaussian mixture models,” 2017
2017
-
[17]
Parameter identification of a robot arm using separable least squares technique,
S. M. Hashemi and H. Werner, “Parameter identification of a robot arm using separable least squares technique,” in2009 European Control Conference (ECC), pp. 2199–2204, 2009
2009
-
[18]
Unified framework to regularized covariance estimation in scaled gaussian models,
A. Wiesel, “Unified framework to regularized covariance estimation in scaled gaussian models,”IEEE Transactions on Signal Processing, vol. 60, no. 1, pp. 29–38, 2012
2012
-
[19]
MERIt – a multi-elastic-link robot iden- tification dataset,
J. Malzahn and T. Bertram, “MERIt – a multi-elastic-link robot iden- tification dataset,” tech. rep., Institute of Control Theory and Systems Engineering (RST), Technische Universit ¨at Dortmund, Dortmund, Ger- many, Oct. 2014
2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.