Event-based Gaze Control System for Accurate Real-time Spin Estimation in Professional Ball Games
Pith reviewed 2026-07-01 06:29 UTC · model grok-4.3
The pith
An event-based active vision system tracks unmodified balls and estimates their spin in real time during professional matches.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
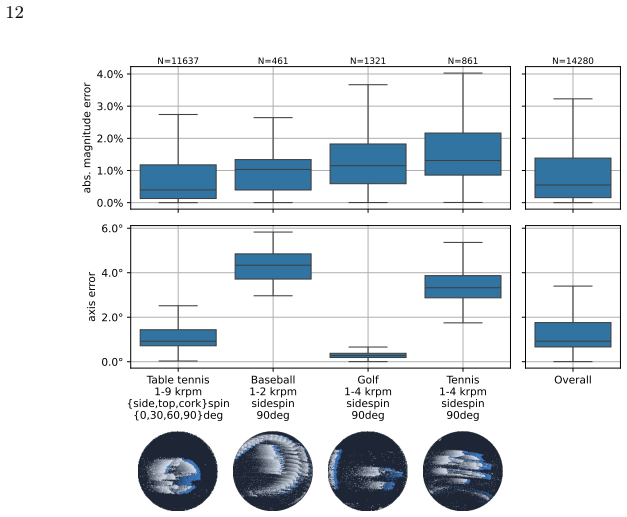
The offline s-CMax method achieves mean magnitude and axis errors of 1.2 percent and 1.5 degrees on static balls in table tennis, baseball, tennis, and golf. The online method, tested in professional table tennis matches with a three-view setup, shows 8.8 percent magnitude and 6.4 degrees axis mismatch relative to the offline method while running at 3 ms latency and 750 Hz throughput.
What carries the argument
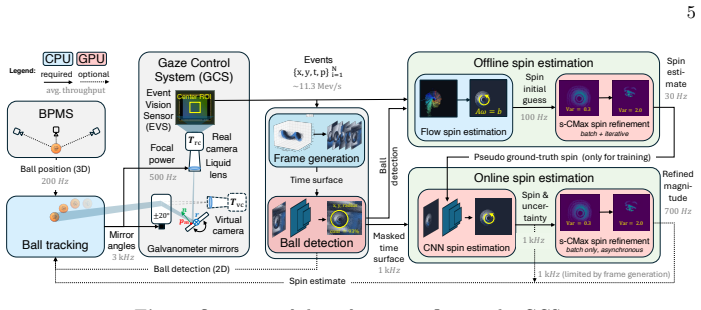
s-CMax contrast maximization performed on the sphere, paired with hybrid 2D event-based detection and 3D re-initialization for active gaze control.
If this is right
- The offline method supplies high-accuracy spin data for analysis in table tennis, baseball, tennis, and golf without ball modifications.
- The online method supports real-time spin feedback at 750 Hz during live professional table tennis matches.
- The active vision hardware maintains focus and centering on fast-moving balls with 3 ms latency.
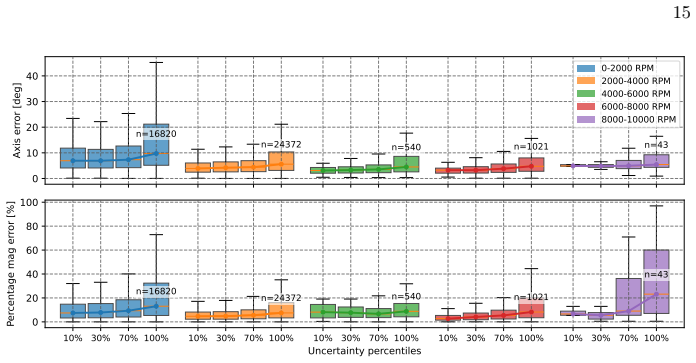
- Pseudo-ground-truth labels from the offline method enable training of real-time neural networks for spin estimation.
Where Pith is reading between the lines
- The same hardware and tracking pipeline could be adapted to other high-speed ball sports by swapping the external localization module.
- Combining the spin estimates with existing physics-based trajectory models would allow more precise prediction of ball paths.
- The 750 Hz throughput opens the possibility of feeding spin data into automated coaching systems or broadcast graphics in real time.
Load-bearing premise
The external 3D ball localization system supplies positions accurate enough to re-initialize and sustain tracking without frequent target loss during fast professional play.
What would settle it
Observation of frequent tracking loss or spin errors larger than 10 percent magnitude or 10 degrees axis mismatch across multiple full professional matches would disprove the reliability of the online method.
Figures

read the original abstract
Spin plays a crucial role in many ball sports due to its effect on the trajectory of the ball. Vision-based estimation of the ball's spin during a game with conventional cameras is challenging due to the ball's small size, high speed, and fast rotation. To address these challenges, we propose an event-based active vision system that can track unmodified balls and measure their spin in real time. The system consists of an event camera for its high temporal resolution and minimal motion blur, high-speed pan/tilt galvanometer mirrors to keep the ball in the field of view, and a low-latency focus-tunable telephoto lens to increase the spatial resolution on the ball and keep it in focus. To track the ball, we use a hybrid approach that combines 2D event-based detection for centering and 3D positions from a ball localization system for re-initialization. For high-accuracy spin estimation, we propose an offline method that performs contrast maximization on the sphere (s-CMax). This method achieves state-of-the-art accuracy on static balls across multiple sports (table tennis, baseball, tennis, and golf), with mean magnitude and axis errors of 1.2% and 1.5 degrees, respectively. We then develop a low-latency online method for table tennis as a case study in real-time applications. This method uses an uncertainty-aware convolutional neural network trained on pseudo-ground-truth spin labels from the offline approach, combined with a GPU-accelerated batch implementation of contrast maximization for refinement. We demonstrate reliable tracking and spin estimation with a three-view setup during professional table tennis matches, with high accuracy (8.8% magnitude and 6.4 degrees axis mismatch w.r.t. the offline method), 3 ms latency, and 750 Hz throughput.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an event-based active vision system for real-time spin estimation of unmodified balls in professional sports. It introduces an offline s-CMax method for high-accuracy spin estimation on static balls across sports, achieving mean errors of 1.2% in magnitude and 1.5 degrees in axis. For real-time application in table tennis, it proposes a hybrid tracking approach using 2D event-based detection and external 3D positions, combined with an uncertainty-aware CNN trained on pseudo-ground-truth from the offline method, reporting 8.8% magnitude and 6.4 degrees axis mismatch to the offline reference, 3 ms latency, and 750 Hz throughput during matches.
Significance. If the reported accuracies hold under independent validation and sustained tracking, the work would advance event-based vision for sports by enabling markerless high-speed spin measurement. The offline s-CMax accuracy on static balls and the low-latency online pipeline are potential strengths if the dependency on pseudo-ground-truth and external localization can be decoupled.
major comments (3)
- [Results (professional table tennis matches)] Results section on professional table tennis matches: the claim of 'reliable tracking and spin estimation' during matches provides no quantitative metrics on track duration, loss frequency, re-initialization rate, or fraction of match time under active control. This is load-bearing for the central claim, as accuracy figures may reflect only short successful segments rather than sustained play.
- [Online method description and results] Online method and results: accuracy is reported exclusively as mismatch w.r.t. the offline s-CMax (8.8% magnitude, 6.4° axis), which also supplies the pseudo-ground-truth labels for CNN training. This circular dependency prevents evaluation against independent ground truth and is load-bearing for the real-time accuracy claim.
- [Tracking approach] Tracking approach: the hybrid 2D event-based centering plus external 3D re-initialization is described, yet no analysis is given of how 3D localization errors propagate into spin estimates or of re-initialization robustness under fast professional play.
minor comments (1)
- [Abstract] Abstract: the 'three-view setup' is mentioned without details on camera configuration or its role in the reported throughput and accuracy.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and indicate planned revisions.
read point-by-point responses
-
Referee: Results section on professional table tennis matches: the claim of 'reliable tracking and spin estimation' during matches provides no quantitative metrics on track duration, loss frequency, re-initialization rate, or fraction of match time under active control. This is load-bearing for the central claim, as accuracy figures may reflect only short successful segments rather than sustained play.
Authors: We agree that quantitative metrics on sustained tracking performance are essential to support the reliability claim. In the revised manuscript we will add statistics computed from the professional match recordings, specifically average track duration, loss frequency, re-initialization rate, and fraction of match time under active control. revision: yes
-
Referee: Online method and results: accuracy is reported exclusively as mismatch w.r.t. the offline s-CMax (8.8% magnitude, 6.4° axis), which also supplies the pseudo-ground-truth labels for CNN training. This circular dependency prevents evaluation against independent ground truth and is load-bearing for the real-time accuracy claim.
Authors: The offline s-CMax has been validated independently against known ground-truth spin on static balls (1.2 % magnitude, 1.5° axis errors). The online CNN is trained to replicate this reference in real time; the reported 8.8 % / 6.4° figures therefore quantify how closely the low-latency pipeline matches the offline reference under match conditions. We will revise the text to state explicitly that accuracy is measured relative to the offline method and to discuss the implications of this reference choice. revision: partial
-
Referee: Tracking approach: the hybrid 2D event-based centering plus external 3D re-initialization is described, yet no analysis is given of how 3D localization errors propagate into spin estimates or of re-initialization robustness under fast professional play.
Authors: We will add a sensitivity study quantifying the effect of 3D localization error on the final spin estimates together with empirical re-initialization success rates observed during the professional matches. revision: yes
Circularity Check
No circularity: offline validated on static balls vs external SOTA; online accuracy explicitly reported as mismatch to offline pseudo-GT
full rationale
The paper's derivation chain separates the offline s-CMax (contrast maximization on the sphere) which is claimed to achieve SOTA accuracy on static balls across sports with explicit mean errors (1.2% magnitude, 1.5 deg axis), from the online CNN+refinement method trained on pseudo-labels generated by that offline stage. The online results are presented only as relative mismatch (8.8% magnitude, 6.4 deg axis) to the offline reference rather than as an independent absolute accuracy claim. No equation or step reduces by construction to its own inputs, no self-citation is load-bearing for a uniqueness theorem or ansatz, and the evaluation does not rename a known result or smuggle an ansatz. The hybrid tracking description does not contain a self-referential loop. This is a standard pseudo-label training setup with transparent relative reporting; the derivation remains self-contained against external benchmarks for the offline stage.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
IEEE Sensors Letters9(3), 1–4 (2025).https://doi.org/ 10.1109/LSENS.2025.3537116, art
Aakanksha, Kumar, A., Rajagopalan, A.: Ball trajectory and spin analysis from asynchronous videos. IEEE Sensors Letters9(3), 1–4 (2025).https://doi.org/ 10.1109/LSENS.2025.3537116, art. no. 3500704
-
[2]
Benosman, R., Clercq, C., Lagorce, X., Sio-Hoi Ieng, Bartolozzi, C.: Event- Based Visual Flow. IEEE Transactions on Neural Networks and Learning Sys- tems25(2), 407–417 (2014).https://doi.org/10.1109/TNNLS.2013.2273537, http://ieeexplore.ieee.org/document/6589170/
-
[3]
Bi, Y., Conti, C., Yang, B., Sigrist, A., Dürr, P., Takahashi, N.: Bridging the sim2realgapinthetabletennisrobotwithatransformer-basedballstatespredictor (2026),https://arxiv.org/abs/2606.11464
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[4]
In: Ranchordas, A., Araújo, H.J., Pereira, J.M., Braz, J
Boracchi, G., Caglioti, V., Giusti, A.: Estimation of 3D Instantaneous Motion of a Ball from a Single Motion-Blurred Image. In: Ranchordas, A., Araújo, H.J., Pereira, J.M., Braz, J. (eds.) Computer Vision and Computer Graphics. Theory and Applications. pp. 225–237. Springer, Berlin, Heidelberg (2009).https://doi. org/10.1007/978-3-642-10226-4_18
-
[5]
In: 2010 IEEE International Conference on Robotics and Biomimetics
Chen, X., Tian, Y., Huang, Q., Zhang, W., Yu, Z.: Dynamic model based ball trajectory prediction for a robot ping-pong player. In: 2010 IEEE International Conference on Robotics and Biomimetics. pp. 603–608 (Dec 2010).https://doi. org/10.1109/ROBIO.2010.5723394
-
[6]
Conti, C., Yang, B., Sigrist, A., Miele, L., Saraiji, Y., Dürr, P., Takahashi, N.: Physics models for sim-to-real transfer in professional-level robot table tennis (2026),https://arxiv.org/abs/2606.28805
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[7]
Dürr, P., El Gheche, M., Maeda, G.J., Mukai, N., Takahashi, N., Heusser, S., Sahloul, H., Saraiji, Y., Adodin, P., Bi, Y., Blakeman, S., Conti, C., Fuentes Hitos, D., Hu, Y., Khadivar, F., Kreiser, R., Martinez, L., Schilling, F., Tapiador Morales, R., Torrente, G., Ynocente Castro, M., Abecassis, L., Giammarino, A., Huang, Y.T., Nagel, Y., Scotti, A., Si...
-
[8]
In: 2020 IEEE International Solid-State Circuits Conference - (ISSCC)
Finateu, T., Niwa, A., Matolin, D., Tsuchimoto, K., Mascheroni, A., Reynaud, E., Mostafalu, P., Brady, F., Chotard, L., LeGoff, F., Takahashi, H., Wakabayashi, H., Oike, Y., Posch, C.: A 1280×720 Back-Illuminated Stacked Temporal Con- trast Event-Based Vision Sensor with 4.86µm Pixels, 1.066GEPS Readout, Pro- grammable Event-Rate Controller and Compressiv...
-
[9]
In: 2009 ICCAS-SICE
Furuno, S., Kobayashi, K., Okubo, T., Kurihara, Y.: A study on spin-rate measure- ment using a uniquely marked moving ball. In: 2009 ICCAS-SICE. pp. 3439–3442 (Aug 2009)
2009
-
[10]
Gallego, G., Delbrück, T., Orchard, G., Bartolozzi, C., Taba, B., Censi, A., Leutenegger, S., Davison, A.J., Conradt, J., Daniilidis, K., Scaramuzza, D.: Event- Based Vision: A Survey. IEEE Trans. Pattern Anal. Mach. Intell.44(1), 154–180 (Jan 2022).https://doi.org/10.1109/TPAMI.2020.3008413 17
-
[11]
In: IEEE Conference on Computer Vision and Pattern Recognition
Gallego, G., Gehrig, M., Scaramuzza, D.: Focus Is All You Need: Loss Functions for Event-Based Vision. In: IEEE Conference on Computer Vision and Pattern Recognition. pp. 12280–12289 (2019)
2019
-
[12]
In: IEEE Conference on Computer Vision and Pattern Recogni- tion
Gallego, G., Rebecq, H., Scaramuzza, D.: A Unifying Contrast Maximization Framework for Event Cameras, with Applications to Motion, Depth, and Optical Flow Estimation. In: IEEE Conference on Computer Vision and Pattern Recogni- tion. pp. 3867–3876 (Jun 2018).https://doi.org/10.1109/CVPR.2018.00407
-
[13]
Gallego, G., Scaramuzza, D.: Accurate Angular Velocity Estimation With an Event Camera. IEEE Robot. Autom. Lett.2(2), 632–639 (Apr 2017).https://doi.org/ 10.1109/LRA.2016.2647639
-
[14]
Computational Optimization and Applications51(1), 259–277 (2012)
Gao, F., Han, L.: Implementing the Nelder-Mead simplex algorithm with adaptive parameters. Computational Optimization and Applications51(1), 259–277 (2012). https://doi.org/10.1007/s10589- 010- 9329- 3,https://doi.org/10.1007/ s10589-010-9329-3
-
[15]
Glover, J., Kaelbling, L.P.: Tracking the spin on a ping pong ball with the quater- nion Bingham filter. In: IEEE Int. Conf. Robot. Autom. pp. 4133–4140. IEEE, Hong Kong, China (May 2014).https://doi.org/10.1109/ICRA.2014.6907460
-
[16]
In: IEEE Conference on Computer Vision and Pattern Recognition Workshops
Gossard, T., Krismer, J., Ziegler, A., Tebbe, J., Zell, A.: Table Tennis Ball Spin Estimation with an Event Camera. In: IEEE Conference on Computer Vision and Pattern Recognition Workshops. pp. 3347–3356 (2024)
2024
-
[17]
Gossard, T., Tebbe, J., Ziegler, A., Zell, A.: SpinDOE: A ball spin estimation method for table tennis robot (Mar 2023).https://doi.org/10.48550/arXiv. 2303.03879
work page internal anchor Pith review doi:10.48550/arxiv 2023
-
[18]
Frontiers in Sports and Active Living5, 1113069 (2023)
Hashimoto, Y., Nagami, T., Yoshitake, S., Nakata, H.: The relationship be- tween pitching parameters and release points of different pitch types in major league baseball players. Frontiers in Sports and Active Living5, 1113069 (2023). https://doi.org/10.3389/fspor.2023.1113069,https://pmc.ncbi.nlm.nih. gov/articles/PMC10164925/
-
[19]
Deep Residual Learning for Image Recognition,
He, K., Zhang, X., Ren, S., Sun, J.: Deep Residual Learning for Image Recognition. In: IEEE Conference on Computer Vision and Pattern Recognition. pp. 770–778. IEEE (2016).https://doi.org/10.1109/CVPR.2016.90,https://ieeexplore. ieee.org/document/7780459/
-
[20]
In: 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems
Huang, Y., Xu, D., Tan, M., Su, H.: Trajectory prediction of spinning ball for ping-pong player robot. In: 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 3434–3439 (Sep 2011).https://doi.org/10.1109/IROS. 2011.6095044
-
[21]
Iida,K.,Oku,H.:SaccadeMirror3:High-speedgazecontrollerwithultrawidegaze control range using triple rotational mirrors. In: IEEE Int. Conf. Robot. Autom. pp. 624–629 (May 2016).https://doi.org/10.1109/ICRA.2016.7487186
-
[22]
Kashiwagi, R., Okamura, S., Iwanaga, S., Murakami, S., Numata, K., Takahashi, H.: The differences in the ball speed and the spin rate depending on the results of a tennis serve. Malaysian Journal of Movement, Health & Exercise10(1), 48 (2021).https://doi.org/10.4103/2231-9409.328217
-
[23]
Kendall, A., Gal, Y.: What Uncertainties Do We Need in Bayesian Deep Learning for Computer Vision? In: Advances in Neural Information Processing Systems. vol. 30, pp. 5574–5584. Curran Associates, Inc. (2017)
2017
-
[24]
In: 2025 IEEE/SICE International Symposium on System Integration (SII)
Miyashita, L., Ishikawa, M.: Saccade Argos: Hierarchical Robust Tracking System for High Spatio-temporal Resolution Vision. In: 2025 IEEE/SICE International Symposium on System Integration (SII). pp. 811–816. IEEE, Munich, Germany (Jan 2025).https://doi.org/10.1109/SII59315.2025.10871046 18
-
[25]
In: IEEE Conference on Computer Vision and Pattern Recognition
Muglikar, M., Gehrig, M., Gehrig, D., Scaramuzza, D.: How to Calibrate Your Event Camera. In: IEEE Conference on Computer Vision and Pattern Recognition. pp.1403–1409.IEEE,Nashville,TN,USA(Jun2021).https://doi.org/10.1109/ CVPRW53098.2021.00155
-
[26]
In: IEEE Conference on Computer Vision and Pattern Recognition Workshops
Nakabayashi, T., Higa, K., Yamaguchi, M., Fujiwara, R., Saito, H.: Event-based Ball Spin Estimation in Sports. In: IEEE Conference on Computer Vision and Pattern Recognition Workshops. pp. 3367–3375 (Jun 2024)
2024
-
[27]
In: Proceedings of the 2010 American Control Conference
Nakashima, A., Ogawa, Y., Kobayashi, Y., Hayakawa, Y.: Modeling of rebound phenomenon of a rigid ball with friction and elastic effects. In: Proceedings of the 2010 American Control Conference. pp. 1410–1415 (2010).https://doi.org/10. 1109/ACC.2010.5530520,https://ieeexplore.ieee.org/document/5530520
-
[28]
In: 2011 IEEE International Conference on Robotics and Biomimetics
Nakashima, A., Ogawa, Y., Liu, C., Hayakawa, Y.: Robotic table tennis based on physical models of aerodynamics and rebounds. In: 2011 IEEE International Conference on Robotics and Biomimetics. pp. 2348–2354 (2011).https://doi. org/10.1109/ROBIO.2011.6181649
-
[29]
In: 2011 IEEE International Conference on Robotics and Automation
Okumura, K., Oku, H., Ishikawa, M.: High-speed gaze controller for millisecond- order pan/tilt camera. In: 2011 IEEE International Conference on Robotics and Automation. pp. 6186–6191 (2011).https : / / doi . org / 10 . 1109 / ICRA . 2011 . 5980080
2011
-
[30]
Advanced Robotics29(7), 457–468 (Apr 2015).https: //doi.org/10.1080/01691864.2015.1011299
Okumura, K., Yokoyama, K., Oku, H., Ishikawa, M.: 1 ms Auto Pan-Tilt – video shooting technology for objects in motion based on Saccade Mirror with background subtraction. Advanced Robotics29(7), 457–468 (Apr 2015).https: //doi.org/10.1080/01691864.2015.1011299
-
[31]
In: Proceedings ofthe7thACMInternationalWorkshoponMultimediaContentAnalysisinSports
Sato, K., Nakabayashi, T., Yamaguchi, M., Higa, K., Fujiwara, R., Saito, H.: Time- consistent Ball Tracking and Spin Estimation with Event Camera. In: Proceedings ofthe7thACMInternationalWorkshoponMultimediaContentAnalysisinSports. pp. 59–64. ACM, Melbourne VIC Australia (Oct 2024).https://doi.org/10. 1145/3689061.3689067
-
[32]
(eds.) Computer Vision – ACCV 2006
Sturm, P., Bonfort, T.: How to Compute the Pose of an Object Without a Di- rect View? In: Narayanan, P.J., Nayar, S.K., Shum, H.Y. (eds.) Computer Vision – ACCV 2006. pp. 21–31. Lecture Notes in Computer Science, Springer, Berlin, Heidelberg (2006).https://doi.org/10.1007/11612704_3
-
[33]
IEEE Transactions on Instrumentation and Measurement62(11), 2890–2900 (Nov 2013)
Su, H., Fang, Z., Xu, D., Tan, M.: Trajectory Prediction of Spinning Ball Based on Fuzzy Filtering and Local Modeling for Robotic Ping–Pong Player. IEEE Transactions on Instrumentation and Measurement62(11), 2890–2900 (Nov 2013). https://doi.org/10.1109/TIM.2013.2263672
-
[34]
https://doi.org/10.1080/18824889.2025.2466881
Sueishi, T., Tochioka, H., Ishikawa, M.: High-speed spin measurement system for dottedtabletennisballusingsingle-frameM-sequencemulti-exposures.SICEJour- nal of Control, Measurement, and System Integration18(1), 2466881 (Dec 2025). https://doi.org/10.1080/18824889.2025.2466881
-
[35]
International Journal of Computer Science in Sport23(1), 37–53 (Feb 2024).https://doi.org/10.2478/ ijcss-2024-0003
Tamaki, S., Yamagata, S., Hashizume, S.: Spin measurement system for table ten- nis balls based on asynchronous non-high-speed cameras. International Journal of Computer Science in Sport23(1), 37–53 (Feb 2024).https://doi.org/10.2478/ ijcss-2024-0003
2024
-
[36]
The 10th Korea-Japan Joint Workshop on Frontiers of Computer Vision pp
Tamaki, T., Sugino, T., Yamamoto, M.: Measuring Ball Spin by Image Registra- tion. The 10th Korea-Japan Joint Workshop on Frontiers of Computer Vision pp. 269–274 (2004)
2004
-
[37]
In: 2012 IEEE International Conference on Acoustics, Speech and Signal Processing 19 (ICASSP)
Tamaki, T., Wang, H., Raytchev, B., Kaneda, K., Ushiyama, Y.: Estimating the spin of a table tennis ball using Inverse Compositional Image Alignment. In: 2012 IEEE International Conference on Acoustics, Speech and Signal Processing 19 (ICASSP). pp. 1457–1460 (Mar 2012).https://doi.org/10.1109/ICASSP.2012. 6288166
-
[38]
Table Tennis Sciences4, 278–284 (2002)
Tang, H.p., Mizoguchi, M., Toyoshima, S.: Speed and spin characteristics of the 40mm table tennis ball. Table Tennis Sciences4, 278–284 (2002)
2002
-
[39]
Tebbe, J., Klamt, L., Gao, Y., Zell, A.: Spin Detection in Robotic Table Tennis. In: IEEE Int. Conf. Robot. Autom. pp. 9694–9700 (May 2020).https://doi.org/ 10.1109/ICRA40945.2020.9196536
-
[40]
The R&A, United States Golf Association: Second Report on the Study of Spin Generation. Tech. rep. (Jan 2007),https://www.jga.or.jp/jga/html/rules/ image/info_groove_second_report_spin_generation_en.pdf
2007
-
[41]
Theobalt, C., Albrecht, I., Haber, J., Magnor, M., Seidel, H.P.: Pitching a baseball: Tracking high-speed motion with multi-exposure images. In: ACM SIGGRAPH 2004 Papers. pp. 540–547. SIGGRAPH ’04, Association for Computing Machinery, New York, NY, USA (Aug 2004).https://doi.org/10.1145/1186562.1015758
-
[42]
arXiv preprint arXiv:2402.13616 (2024)
Wang, C.Y., Yeh, I.H., Liao, H.Y.M.: YOLOv9: Learning What You Want to Learn Using Programmable Gradient Information (Feb 2024).https://doi.org/10. 48550/arXiv.2402.13616
-
[43]
Wang, J., Olson, E.: AprilTag 2: Efficient and robust fiducial detection. In: IEEE/RSJ Int. Conf. Intell. Robots Syst. pp. 4193–4198 (Oct 2016).https: //doi.org/10.1109/IROS.2016.7759617
-
[44]
Zhang, Y., Xiong, R., Zhao, Y., Wang, J.: Real-Time Spin Estimation of Ping-Pong Ball Using Its Natural Brand. IEEE Transactions on Instrumentation and Mea- surement64(8), 2280–2290 (Aug 2015).https://doi.org/10.1109/TIM.2014. 2385173
-
[45]
Zhang, Y., Zhao, Y., Xiong, R., Wang, Y., Wang, J., Chu, J.: Spin observation and trajectory prediction of a ping-pong ball. In: IEEE Int. Conf. Robot. Autom. pp. 4108–4114 (May 2014).https://doi.org/10.1109/ICRA.2014.6907456
-
[46]
IEEE Journal on Emerging and Selected Topics in Circuits and Systems10(4), 557–566 (2020)
Zhu, Q., Triesch, J., Shi, B.E.: An Event-by-Event Approach for Velocity Esti- mation and Object Tracking With an Active Event Camera. IEEE Journal on Emerging and Selected Topics in Circuits and Systems10(4), 557–566 (2020). https://doi.org/10.1109/JETCAS.2020.3040329
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.