Learning to Distributedly Estimate under Partially Known Dynamics: A Covariance-Agnostic Neural Kalman Consensus Filter
Pith reviewed 2026-06-30 01:23 UTC · model grok-4.3
The pith
Agents collaboratively estimate latent states by learning consensus weights and Kalman-like updates without any noise statistics knowledge.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
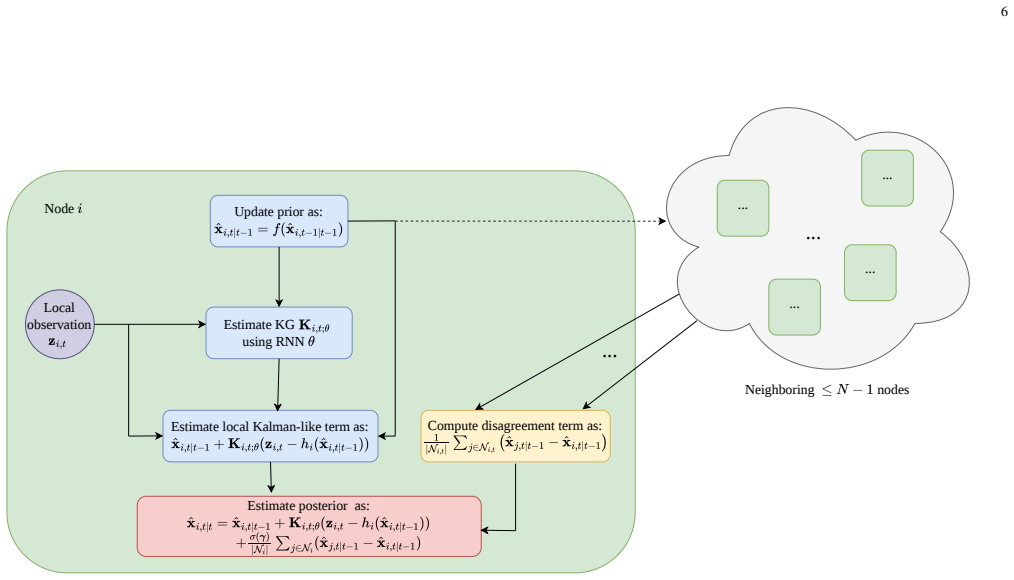
The Covariance-Agnostic Neural Kalman Consensus Filter performs decentralized latent state estimation by feeding prior estimates into neural networks that compute optimized consensus weights and Kalman-style correction steps, all without access to noise covariance matrices; the resulting estimator remains accurate under model misspecification across linear, chaotic, and practical wireless scenarios.
What carries the argument
The CA-NKCF, a neural-network-driven variant of the Kalman consensus filter that learns consensus weights and update gains from partial dynamics knowledge to replace explicit covariance calculations.
If this is right
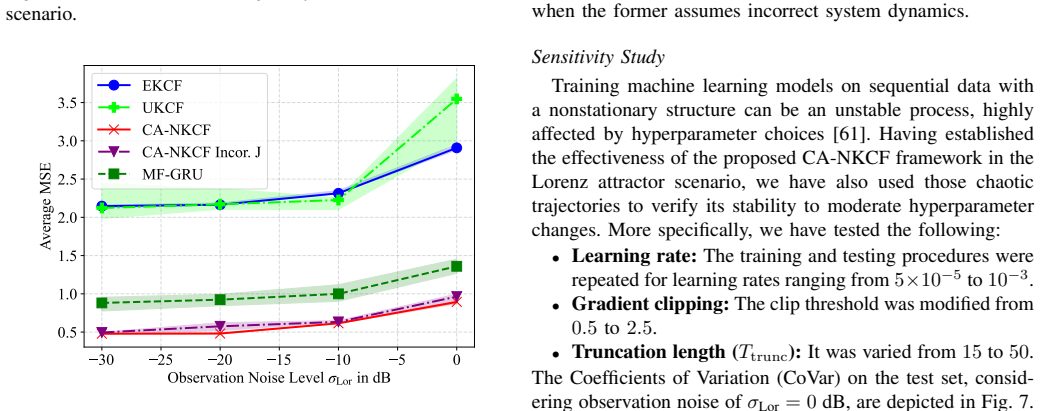
- The estimator maintains its advantage over baselines across varying noise intensities, random communication graphs, state dimensions, and clutter densities.
- Accuracy holds when the motion and observation models supplied to the agents are misspecified.
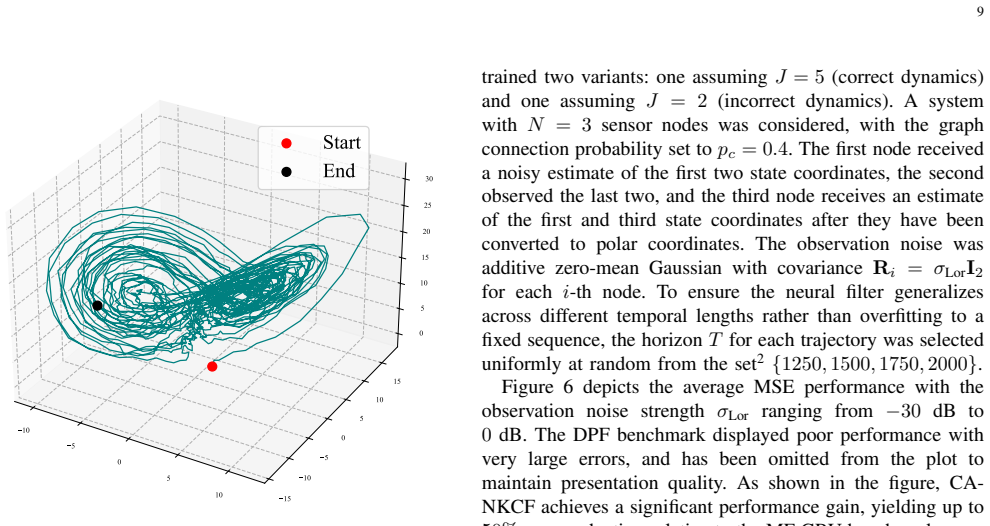
- The same learned structure applies to both linear and nonlinear dynamics such as the Lorenz attractor.
- The approach supports online tasks including change-point detection without requiring separate noise calibration.
Where Pith is reading between the lines
- The method could be tested on physical multi-robot platforms where sensor noise is hard to characterize in advance.
- Training the networks on data from one topology and deploying on another would check generalization of the learned consensus rules.
- Extending the framework to include intermittent communication or packet loss would reveal whether the neural updates remain stable under realistic network faults.
Load-bearing premise
Neural networks can be trained to produce reliable consensus weights and update steps from partial dynamics knowledge alone when noise statistics are entirely unavailable.
What would settle it
A controlled simulation in which the neural filter's mean squared error exceeds that of a standard distributed particle filter once the state dimension exceeds 10 and the supplied motion model deviates by more than 30 percent from truth.
Figures

read the original abstract
Online latent state estimation constitutes a fundamental challenge within the artificial intelligence field, serving as a foundational tool for diverse applications, including sequential decision making, anomaly and change-point detection. In this paper, a novel online distributed sensing framework, where agents collaborate and exchange information to perform latent state estimation, is presented. The proposed estimator combines available partial domain knowledge with the representation capabilities of deep neural networks. In particular, the designed sensing framework incorporates prior estimates, optimized consensus weights, and Kalman-like recursive updates to perform decentralized inference, without relying on knowledge of noise statistics. Extensive experiments on linear, chaotic (Lorenz), and practical wireless tracking environments reveal that the proposed Covariance-Agnostic Neural Kalman Consensus Filter (CA-NKCF) outperforms traditional distributed Kalman and particle filters as well as purely model-free deep neural networks, exhibiting robustness even when the underlying motion and observation models are misspecified. It is also demonstrated that CA-NKCF's performance advantage remains stable across varying noise levels, random communication topologies, latent state dimensions, and observation clutter densities induced by scattering objects in wireless systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes the Covariance-Agnostic Neural Kalman Consensus Filter (CA-NKCF), a hybrid distributed estimation framework that fuses partial domain knowledge of dynamics with deep neural networks. The method incorporates prior estimates, learned consensus weights, and Kalman-style recursive updates to perform decentralized latent state inference without access to noise covariance statistics. Experiments across linear systems, Lorenz chaotic dynamics, and wireless tracking scenarios report consistent outperformance relative to distributed Kalman filters, particle filters, and purely model-free neural networks, with maintained advantages under model misspecification, varying noise levels, random topologies, state dimensions, and clutter densities.
Significance. If the empirical results hold, the work demonstrates a practical route to covariance-agnostic distributed estimation by combining partial physics with learned components, addressing a common limitation in sensor networks and tracking applications. Credit is due for the breadth of experimental validation (linear, nonlinear chaotic, and wireless cases) and explicit robustness tests under misspecification; these provide concrete evidence beyond abstract claims.
minor comments (3)
- [§3] §3 (method): the precise architecture of the neural modules that output consensus weights and correction gains should be stated explicitly (layer counts, activation functions, input features) so that the hybrid construction can be reproduced without ambiguity.
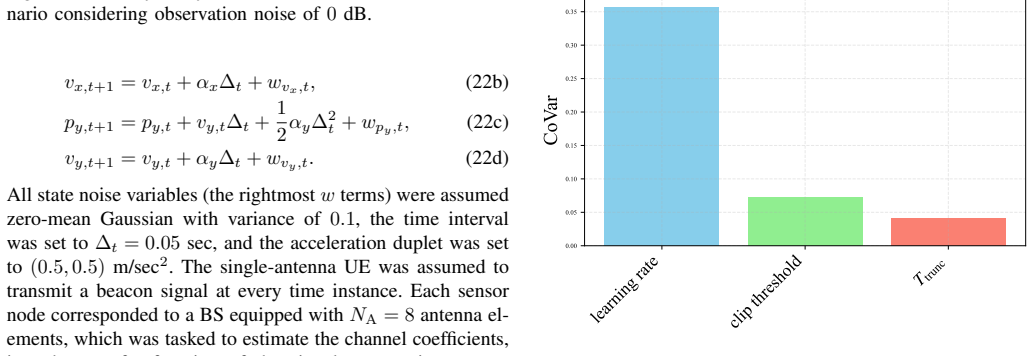
- [§4] §4 (experiments): while outperformance is reported, the tables or figures should include standard deviations or confidence intervals across random seeds and communication graphs to substantiate the stability claims across topologies.
- Notation: the distinction between the learned quantities and the partial model-based terms (e.g., the prediction step) should be clarified with a single summary equation or table to avoid reader confusion between the two information sources.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our manuscript on the Covariance-Agnostic Neural Kalman Consensus Filter (CA-NKCF) and for recommending minor revision. The summary accurately reflects the hybrid neural-Kalman approach, its covariance-agnostic property, and the breadth of experimental validation across linear, chaotic, and wireless settings.
Circularity Check
No significant circularity identified
full rationale
The manuscript presents a hybrid neural architecture for distributed state estimation that fuses partial dynamics knowledge with learned consensus weights and recursive updates, remaining agnostic to noise covariances. All load-bearing claims rest on the training procedure and empirical outperformance across linear, Lorenz, and wireless scenarios under misspecification; no equations, uniqueness theorems, or self-citations are invoked to derive performance guarantees by construction. The reported results are therefore falsifiable against external benchmarks and do not reduce to fitted inputs renamed as predictions or to self-referential definitions.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
LumiMAS: A comprehensive framework for real- time monitoring and enhanced observability in multi-agent systems,
R. Solomonet al., “LumiMAS: A comprehensive framework for real- time monitoring and enhanced observability in multi-agent systems,” in Proc. AAMAS, (Paphos, Cyprus), 2026
2026
-
[2]
IMAS2: Joint agent selection and information-theoretic coordinated perception in Dec-POMDPs,
C. Shiet al., “IMAS2: Joint agent selection and information-theoretic coordinated perception in Dec-POMDPs,” inProc. AAMAS, (Paphos, Cyprus), 2026
2026
-
[3]
An approach to target tracking,
M. Gruber, “An approach to target tracking,” technical report, MIT Lincoln Laboratory, Lexington, MA, 1967
1967
-
[4]
Application of the extended Kalman filter to ballistic trajectory estimation,
R. E. Larsonet al., “Application of the extended Kalman filter to ballistic trajectory estimation,”Stanford Research Institute, Tech. Rep., 1967
1967
-
[5]
Industrial applications of the Kalman filter: A review,
F. Augeret al., “Industrial applications of the Kalman filter: A review,” IEEE Trans. Ind. Electron, vol. 60, no. 12, pp. 5458–5471, 2013
2013
-
[6]
A distributed control framework for a team of unmanned aerial vehicles for dynamic wildfire tracking,
H. X. Pham and Lothers, “A distributed control framework for a team of unmanned aerial vehicles for dynamic wildfire tracking,” inProc. IEEE/RSJ IROS, (Vancouver, Canada), 2017
2017
-
[7]
Simultaneous distributed acoustic and temperature sensing for robust leakage detection in gas pipelines,
V . P. Anandet al., “Simultaneous distributed acoustic and temperature sensing for robust leakage detection in gas pipelines,”J. Lightwave Techn., vol. 44, no. 7, pp. 2849–2857, 2026
2026
-
[8]
A new approach to linear filtering and prediction problems,
R. E. Kalman, “A new approach to linear filtering and prediction problems,”J. Basic Engineering, vol. 82, pp. 35–45, 03 1960
1960
-
[9]
The unscented Kalman filter for nonlinear estimation,
E. Wan and R. Van Der Merwe, “The unscented Kalman filter for nonlinear estimation,” inProc. IEEE AS-SPCC, (Alberta, Canada), 2000
2000
-
[10]
CTD4 – a deep continuous distributional actor- critic agent with a Kalman fusion of multiple critics,
D. Valenciaet al., “CTD4 – a deep continuous distributional actor- critic agent with a Kalman fusion of multiple critics,” inProc. AAAI, (Philadelphia, Pennsylvania, USA), 2025
2025
-
[11]
Partial diffusion Kalman filtering for distributed state estimation in multiagent networks,
V . Vahidpouret al., “Partial diffusion Kalman filtering for distributed state estimation in multiagent networks,”IEEE Trans. Neural Netw. Learn. Syst., vol. 30, no. 12, pp. 3839–3846, 2019
2019
-
[12]
Artificial intelligence-aided Kalman filters: AI- augmented designs for Kalman-type algorithms,
N. Shlezingeret al., “Artificial intelligence-aided Kalman filters: AI- augmented designs for Kalman-type algorithms,”IEEE Signal Process. Mag., pp. 2–26, 2025
2025
-
[13]
Long short-term memory,
S. Hochreiter and J. Schmidhuber, “Long short-term memory,”Neural Computation, vol. 9, no. 8, pp. 1735–1780, 1997
1997
-
[14]
Empirical Evaluation of Gated Recurrent Neural Networks on Sequence Modeling
J. Chunget al., “Empirical evaluation of gated recurrent neural networks on sequence modeling,”arXiv preprint: 1412.3555, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[15]
Identification of nonlinear state space models using an MLP network trained by the EM algorithm,
A. A. Gorji and M. B. Menhaj, “Identification of nonlinear state space models using an MLP network trained by the EM algorithm,” inProc. IEEE IJCNN, (Hong Kong, China), 2008
2008
-
[16]
Sequential neural models with stochastic layers,
M. Fraccaroet al., “Sequential neural models with stochastic layers,” in Proc. NeurIPS, (Barcelona, Spain), 2016
2016
-
[17]
Combining generative and discriminative models for hybrid inference,
V . G. Satorraset al., “Combining generative and discriminative models for hybrid inference,” inProc. NeurIPS, (Vancouver Canada), 2019
2019
-
[18]
DANSE: Data-driven non-linear state estimation of model-free process in unsupervised learning setup,
A. Ghoshet al., “DANSE: Data-driven non-linear state estimation of model-free process in unsupervised learning setup,”IEEE Trans. Signal Process., vol. 72, pp. 1824–1838, 2024
2024
-
[19]
Long short-term memory Kalman filters: Recurrent neural estimators for pose regularization,
H. Coskunet al., “Long short-term memory Kalman filters: Recurrent neural estimators for pose regularization,” inProc. IEEE ICCV, (Venice, Italy), 2017
2017
-
[20]
KalmanNet: Neural network aided Kalman filtering for partially known dynamics,
G. Revachet al., “KalmanNet: Neural network aided Kalman filtering for partially known dynamics,”IEEE Trans. Signal Proces., vol. 70, pp. 1532–1547, 2022
2022
-
[21]
Latent-KalmanNet: Learned Kalman filtering for tracking from high-dimensional signals,
I. Buchniket al., “Latent-KalmanNet: Learned Kalman filtering for tracking from high-dimensional signals,”IEEE Trans. Signal Process., vol. 72, pp. 352–367, 2024
2024
-
[22]
Filtering Markov jump systems with partially known dynamics: A model-based deep learning approach,
G. Stamatelis and G. C. Alexandropoulos, “Filtering Markov jump systems with partially known dynamics: A model-based deep learning approach,”IEEE Trans. Signal Proces. (Early Acess), 2026
2026
-
[23]
Distributed weighted average consensus fusion based on admm under measurement uncertainty,
T. Cuiet al., “Distributed weighted average consensus fusion based on admm under measurement uncertainty,”Signal Process., vol. 241, p. 110380, 2026
2026
-
[24]
Consensus in multi-agent systems: a review,
A. Amirkhani and A. H. Barshooi, “Consensus in multi-agent systems: a review,”Artif. Intell. Rev., vol. 55, p. 3897–3935, June 2022
2022
-
[25]
Kalman-consensus filter : Optimality, stability, and performance,
R. Olfati-Saber, “Kalman-consensus filter : Optimality, stability, and performance,” inProc. IEEE CDC, (Shanghai, China), 2009
2009
-
[26]
Multi-agent reinforcement learning as a rehearsal for decentralized planning,
L. Kraemer and B. Banerjee, “Multi-agent reinforcement learning as a rehearsal for decentralized planning,”Neurocomputing, vol. 190, pp. 82– 94, 2016
2016
-
[27]
Multi-agent actor-critic for mixed cooperative- competitive environments,
R. Loweet al., “Multi-agent actor-critic for mixed cooperative- competitive environments,” inProc. NeurIPS, (Long Beach, California, USA), 2017
2017
-
[28]
Distributed kalman filtering for sensor networks,
R. Olfati-Saber, “Distributed kalman filtering for sensor networks,” in Proc. IEEE CDC, (New Orleans, Louisiana, USA), 2007
2007
-
[29]
Information weighted consensus,
A. T. Kamalet al., “Information weighted consensus,” inProc. IEEE CDC, (Maui, Hawaii, USA), 2012
2012
-
[30]
A fully decentralized multi-sensor system for tracking and surveillance,
B. Raoet al., “A fully decentralized multi-sensor system for tracking and surveillance,”Intern. J. Robotics Research, vol. 12, no. 1, pp. 20–44, 1993
1993
-
[31]
Optimal discrete-time kalman consensus filter,
R. Deshmukhet al., “Optimal discrete-time kalman consensus filter,” in Proc. ACC, (Seattle, Washington, USA), 2017
2017
-
[32]
Optimal Kalman filter with information-weighted consensus,
S. Khanet al., “Optimal Kalman filter with information-weighted consensus,”IEEE Trans. Autom. Control, vol. 68, no. 9, pp. 5624–5629, 2023
2023
-
[33]
An efficient distributed Kalman filter over sensor networks with maximum correntropy criterion,
C. Hu and B. Chen, “An efficient distributed Kalman filter over sensor networks with maximum correntropy criterion,”IEEE Trans. Signal Inf. Process. Networks, vol. 8, pp. 433–444, 2022
2022
-
[34]
Distributed Kalman consensus filter for estimation with moving targets,
B. Lianet al., “Distributed Kalman consensus filter for estimation with moving targets,”IEEE Trans. Cybern., vol. 52, no. 6, pp. 5242–5254, 2022
2022
-
[35]
Distributed Kalman filtering under two-bitrate peri- odic coding strategies,
Q. Liuet al., “Distributed Kalman filtering under two-bitrate peri- odic coding strategies,”IEEE Trans. Autom. Control, vol. 69, no. 12, pp. 8633–8646, 2024
2024
-
[36]
Distributed Kalman filtering with event- triggered communication: a robust approach,
D. Ghion and M. Zorzi, “Distributed Kalman filtering with event- triggered communication: a robust approach,” inProc. Medit. Conf. Control Autom., (Athens, Greece), 2022
2022
-
[37]
Privacy-preserving distributed Kalman filtering,
A. Moradiet al., “Privacy-preserving distributed Kalman filtering,”IEEE Trans. Signal Process., vol. 70, pp. 3074–3089, 2022
2022
-
[38]
Particle learning and smoothing,
C. M. Carvalhoet al., “Particle learning and smoothing,”Statistical Science, vol. 25, no. 1, pp. 88–106, 2010
2010
-
[39]
Sequential monte carlo methods under model uncer- tainty,
I. Urtcagaet al., “Sequential monte carlo methods under model uncer- tainty,” inProc. IEEE SSP, (Palma de Mallorca, Spain), 2016
2016
-
[40]
A particle filtering based approach to approximating interactive POMDPs,
P. Doshi and P. J. Gmytrasiewicz, “A particle filtering based approach to approximating interactive POMDPs,” inProc. AAAI, (Pittsburgh, Pennsylvania, USA), 2005
2005
-
[41]
Distributed particle filters for sensor networks,
M. Coates, “Distributed particle filters for sensor networks,” inProc. ACM IPSN, (Berkeley, California, USA), 2004
2004
-
[42]
RTSNet: Learning to smooth in partially known state- space models,
G. Revachet al., “RTSNet: Learning to smooth in partially known state- space models,”IEEE Trans. Signal Process., vol. 71, pp. 4441–4456, 2023
2023
-
[43]
Structured inference networks for nonlinear state space models,
R. G. Krishnanet al., “Structured inference networks for nonlinear state space models,” inProc. AAAI, (San Francisco, California, USA), 2017
2017
-
[44]
R. G. Krishnanet al., “Deep Kalman filters,”arXiv preprint: 1511.05121, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[45]
A disentangled recognition and nonlinear dynamics model for unsupervised learning,
M. Fraccaroet al., “A disentangled recognition and nonlinear dynamics model for unsupervised learning,” inProc. NeurIPS, (Long Beach, California, USA), 2017
2017
-
[46]
Model-based deep learning,
N. Shlezingeret al., “Model-based deep learning,”Proc. IEEE, vol. 111, no. 5, pp. 465–499, 2023
2023
-
[47]
MoDL: Model-based deep learning architecture for inverse problems,
H. K. Aggarwalet al., “MoDL: Model-based deep learning architecture for inverse problems,”IEEE Trans. Medical Imag., vol. 38, no. 2, pp. 394–405, 2019
2019
-
[48]
DCD-MUSIC: Deep-learning-aided cascaded differen- tiable MUSIC algorithm for near-field localization of multiple sources,
A. Gastet al., “DCD-MUSIC: Deep-learning-aided cascaded differen- tiable MUSIC algorithm for near-field localization of multiple sources,” inProc. IEEE ICASSP, (Hyderabad, India), 2025
2025
-
[49]
Learned robust PCA: a scalable deep unfolding approach for high-dimensional outlier detection,
H. Caiet al., “Learned robust PCA: a scalable deep unfolding approach for high-dimensional outlier detection,” inProc. NeurIPS, (Virtual), 2021
2021
-
[50]
Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations,
M. Raissiet al., “Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations,”J. Comput. Physics, vol. 378, pp. 686–707, 2019
2019
-
[51]
Dual-balancing for physics-informed neural networks,
C. Zhouet al., “Dual-balancing for physics-informed neural networks,” inProc. IJCAI, (Montreal Canada), 2025. 13
2025
-
[52]
Graph-CNNs for RF imaging: Learning the electric field integral equations,
K. Stylianopouloset al., “Graph-CNNs for RF imaging: Learning the electric field integral equations,” inProc. EUSIPCO, (Palermo, Italy), 2025
2025
-
[53]
A Physics-Informed Hierarchical Neural Network for Microwave Scattering Analysis of 3D PEC Targets
R. Zhuet al., “U-PINet: Physics-informed hierarchical learning for radar cross section prediction via 3D electromagnetic scattering reconstruc- tion,”arXiv preprint: 2508.03774, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[54]
A. Vaswaniet al., “Attention is all you need,”arXiv preprint arXiv:1706.03762, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[55]
Dota 2 with Large Scale Deep Reinforcement Learning
OpenAI, “Dota 2 with large scale deep reinforcement learning,”arXiv preprint: 1912.06680, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1912
-
[56]
Parameter sharing with network pruning for scalable multi-agent deep reinforcement learning,
W. Kim and Y . Sung, “Parameter sharing with network pruning for scalable multi-agent deep reinforcement learning,” inProc. AAMAS, (London, United Kingdom), 2023
2023
-
[57]
Parameter sharing reinforcement learning archi- tecture for multi agent driving,
M. Kaushiket al., “Parameter sharing reinforcement learning archi- tecture for multi agent driving,” inProc. AIR, ACM International Conference Proceedings Series, (Chennai, India), 2019
2019
-
[58]
Consensus seeking in multiagent systems under dynamically changing interaction topologies,
W. Ren and R. Beard, “Consensus seeking in multiagent systems under dynamically changing interaction topologies,”IEEE Trans. Autom. Control, vol. 50, no. 5, pp. 655–661, 2005
2005
-
[59]
Consensus and cooperation in networked multi- agent systems,
R. Olfati-Saberet al., “Consensus and cooperation in networked multi- agent systems,”Proc. IEEE, vol. 95, no. 1, pp. 215–233, 2007
2007
-
[60]
Adam: A Method for Stochastic Optimization
D. P. Kingma and J. Ba, “Adam: A method for stochastic optimization,” arXiv preprint: 1412.6980, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[61]
Lstm: A search space odyssey,
K. Greffet al., “Lstm: A search space odyssey,”IEEE Trans Neural Netw. Learn. Syst., vol. 28, no. 10, pp. 2222–2232, 2017
2017
-
[62]
NR; Physical channels and modulation,
3GPP, “NR; Physical channels and modulation,” Technical Specification TS 38.211, 3rd Generation Partnership Project (3GPP), 2020
2020
-
[63]
Radio localization and sens- ing—Part i: Fundamentals,
H. Wymeersch and G. Seco-Granados, “Radio localization and sens- ing—Part i: Fundamentals,”IEEE Commun. Lett., vol. 26, no. 12, pp. 2816–2820, 2022
2022
-
[64]
A tutorial on 5G positioning,
L. Italianoet al., “A tutorial on 5G positioning,”IEEE Commun. Surveys & Tuts., vol. 27, no. 3, pp. 1488–1535, 2025
2025
-
[65]
Deconstructing multiantenna fading channels,
A. M. Sayeed, “Deconstructing multiantenna fading channels,”IEEE Trans. Signal Process., vol. 50, no. 10, pp. 2563–2579, 2002
2002
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.