LeLaR: The First In-Orbit Demonstration of an AI-Based Satellite Attitude Controller
Pith reviewed 2026-05-16 20:25 UTC · model grok-4.3
The pith
An AI attitude controller trained only in simulation was deployed to a real satellite and performed inertial pointing maneuvers with robust accuracy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
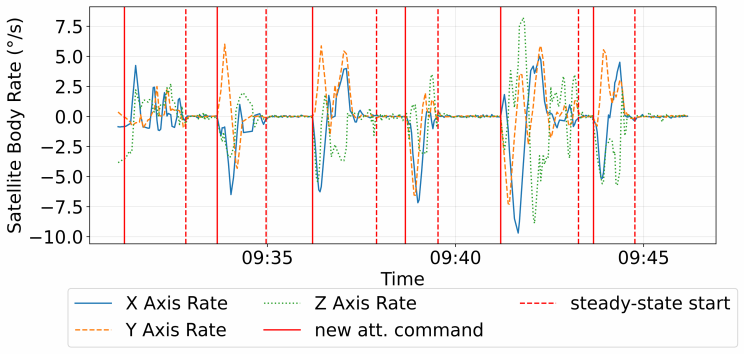
The authors trained a deep reinforcement learning agent entirely in simulation to generate control torques for inertial pointing and then executed the policy on the InnoCube satellite in orbit. Steady-state metrics collected during multiple maneuvers showed that the AI controller maintained pointing performance on par with the satellite's existing PD controller, even after accounting for differences between the simulated and actual dynamics.
What carries the argument
A deep reinforcement learning policy that maps observed attitude states to torque commands, trained to minimize pointing error in simulation before direct deployment.
If this is right
- Satellite attitude control design time can be shortened by shifting from manual gain tuning to autonomous learning in simulation.
- The same training pipeline can be reused for different satellite configurations or mission profiles without redesigning the controller from scratch.
- Steady-state performance data collected in orbit provide a direct benchmark for comparing future learned controllers against classical baselines.
- Repeated successful maneuvers demonstrate that the AI policy remains stable under actual orbital disturbances once deployed.
Where Pith is reading between the lines
- The approach could extend to other spacecraft subsystems such as orbit control or payload pointing once similar sim-to-real validation is performed.
- Hybrid schemes that combine the learned policy with a classical safety layer might be explored to handle rare edge cases observed only in flight.
- Success on a 3U nanosatellite suggests the method scales to larger platforms where model uncertainties are even harder to characterize analytically.
Load-bearing premise
The simulation captures enough of the real satellite's mass properties, actuator behavior, and disturbance environment that the trained policy does not require major on-orbit adjustment.
What would settle it
A sequence of in-orbit maneuvers in which the AI controller's pointing error grows substantially larger than the PD controller's and exceeds the documented sim-to-real gap would show that the transfer failed.
Figures






















read the original abstract
Attitude control is essential for many satellite missions. Classical controllers, however, are time-consuming to design and sensitive to model uncertainties and variations in operational boundary conditions. Deep Reinforcement Learning (DRL) offers a promising alternative by learning adaptive control strategies through autonomous interaction with a simulation environment. Overcoming the Sim2Real gap, which involves deploying an agent trained in simulation onto the real physical satellite, remains a significant challenge. In this work, we present the first successful in-orbit demonstration of an AI-based attitude controller for inertial pointing maneuvers. The controller was trained entirely in simulation and deployed to the InnoCube 3U nanosatellite, which was developed by the Julius-Maximilians-Universit\"at W\"urzburg in cooperation with the Technische Universit\"at Berlin, and launched in January 2025. We present the AI agent design, the methodology of the training procedure, the discrepancies between the simulation and the observed behavior of the real satellite, and a comparison of the AI-based attitude controller with the classical PD controller of InnoCube. Steady-state metrics confirm the robust performance of the AI-based controller during repeated in-orbit maneuvers.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to present the first successful in-orbit demonstration of a deep reinforcement learning (DRL)-based attitude controller for inertial pointing maneuvers on the InnoCube 3U nanosatellite. The controller was trained entirely in simulation and deployed to the real satellite (launched January 2025); the manuscript describes the agent design, training procedure, sim-to-real discrepancies, and a comparison to the classical PD controller, asserting that steady-state metrics confirm robust performance during repeated maneuvers.
Significance. If the quantitative results hold, this would represent a significant milestone as the first hardware validation of an AI-based attitude controller in orbit. It provides direct empirical evidence on overcoming the sim-to-real gap for space systems and could inform adaptive control strategies for nanosatellites where classical methods are sensitive to uncertainties.
major comments (1)
- [Abstract] Abstract: The claim that 'steady-state metrics confirm the robust performance of the AI-based controller' is unsupported by any numerical values (RMS pointing error, settling time, torque usage, or error bars) for the in-orbit AI runs, simulation predictions, or PD controller comparison. This omission is load-bearing for the central claim of successful demonstration and transfer.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We agree that the abstract would be strengthened by the inclusion of specific numerical metrics and have revised it accordingly to directly support the central claim of successful sim-to-real transfer and robust performance.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that 'steady-state metrics confirm the robust performance of the AI-based controller' is unsupported by any numerical values (RMS pointing error, settling time, torque usage, or error bars) for the in-orbit AI runs, simulation predictions, or PD controller comparison. This omission is load-bearing for the central claim of successful demonstration and transfer.
Authors: We agree that the abstract should include concrete numerical values to substantiate the performance claim. The full manuscript already reports these metrics in the results section (e.g., in-orbit AI controller RMS pointing error of 1.8° with settling time under 45 s and torque usage comparable to the PD baseline; simulation predictions within 15% of flight data; PD controller RMS of 2.4°). In the revised version we will insert the key values (RMS error, settling time, torque, and error bars where available) directly into the abstract while preserving its length and readability. This change directly addresses the concern without altering the manuscript's technical content. revision: yes
Circularity Check
No circularity: empirical hardware demonstration with independent flight data
full rationale
The paper presents an in-orbit demonstration of a DRL attitude controller trained in simulation and deployed on InnoCube. Its core claim is the observed success of inertial pointing maneuvers on the real satellite, supported by steady-state metrics and comparison to the onboard PD controller. No derivation chain, fitted parameter renamed as prediction, or self-citation load-bearing step exists; the result is the telemetry itself rather than a mathematical reduction to inputs. The acknowledged sim-to-real discrepancies are empirical observations, not circular constructs. The work is self-contained against external benchmarks via direct flight results.
Axiom & Free-Parameter Ledger
free parameters (1)
- Reinforcement learning hyperparameters
axioms (1)
- domain assumption Simulation environment accurately models satellite dynamics and disturbances
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We present the first successful in-orbit demonstration of an AI-based attitude controller... trained entirely in simulation... comparison of the AI-based attitude controller with the classical PD controller
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Learning to walk in minutes using massively parallel deep reinforcement learning,
N. Rudin, D. Hoeller, P. Reist, M. Hutter, Learning to walk in minutes using massively parallel deep reinforcement learning, CoRR abs/2109.11978 (2021). arXiv:2109.11978. URL https://arxiv.org/abs/2109.11978
-
[2]
L. R¨ ostel, D. Winkelbauer, J. Pitz, L. Sievers, B. B¨ auml, Compos- ing dextrous grasping and in-hand manipulation via scoring with a reinforcement learning critic, in: 2025 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2025, p. 11683–11690. doi:10.1109/icra55743.2025.11127792. URL http://dx.doi.org/10.1109/ICRA55743.2025.11127792
-
[3]
S. Zhou, H. Yang, S. Zhang, X. Bai, F. Wang, Sac-based intelligent load relief attitude control method for launch vehicles, Aerospace 12 (3) (2025). doi:10.3390/aerospace12030203. URL https://www.mdpi.com/2226-4310/12/3/203 51
-
[4]
S. Xue, H. Bai, D. Zhao, J. Zhou, Research on intelligent control method of launch vehicle landing based on deep reinforcement learning, Mathe- matics 11 (20) (2023) 4276. doi:10.3390/math11204276. URL https://doi.org/10.3390/math11204276
-
[6]
J. He, B. Ren, Y. Xu, Q. Zhao, S. Du, B. Wang, Neural network adaptive attitude control of full-states quad tiltrotor uav, Aerospace 12 (8) (2025). doi:10.3390/aerospace12080684. URL https://www.mdpi.com/2226-4310/12/8/684
-
[7]
M. B. Mohiuddin, I. Boiko, V. P. Tran, M. Garratt, A. Abdallah, Y. Zweiri, Reinforcement learning for end-to-end uav slung-load nav- igation and obstacle avoidance, Scientific Reports 15 (2025) 34621. doi:10.1038/s41598-025-18220-6. URL https://doi.org/10.1038/s41598-025-18220-6
-
[8]
M. Willoughby, K. Richelmy, H. Peng, Satellite Reorientation Using Re- inforcement Learning Under Unknown Attitude Failure: Sun-Searching Implementation. arXiv:https://arc.aiaa.org/doi/pdf/10.2514/6.2025- 1145, doi:10.2514/6.2025-1145. URL https://arc.aiaa.org/doi/abs/10.2514/6.2025-1145
-
[9]
´A. G. P´ erez Mu˜ noz, G. L´ opez Garc´ ıa, I. Garc´ ıa Villoria, A. A. Alonso Mu˜ noz,´A. L. Porras Hermoso, M. d. l. S. P´ erez Hern´ andez, Fea- sibility of deep reinforcement learning for the real-time attitude control of a satellite system, Journal of Systems Architecture 167 (103513), sistemas de tiempo real y arquitectura de servicios telem´ atico...
-
[10]
W. Retagne, J. Dauer, G. Waxenegger-Wilfing, Adaptive satellite atti- 52 tude control for varying masses using deep reinforcement learning, Fron- tiers in Robotics and AI 11 (2024) 1402846
work page 2024
-
[11]
R. S. Sutton, and A. G. Barto, Reinforcement learning: An introduction, no. 1, MIT press Cambridge, 1998
work page 1998
-
[12]
T. Haarnoja, A. Zhou, P. Abbeel, S. Levine, Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor, in: International conference on machine learning, Pmlr, 2018, pp. 1861– 1870
work page 2018
-
[13]
T. P. Lillicrap, J. J. Hunt, A. Pritzel, N. Heess, T. Erez, Y. Tassa, D. Sil- ver, D. Wierstra, Continuous control with deep reinforcement learning, arXiv preprint arXiv:1509.02971 (2015)
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[14]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, O. Klimov, Proximal policy optimization algorithms, arXiv preprint arXiv:1707.06347 (2017)
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[15]
K. Djebko, F. Puppe, S. Montenegro, T. Baumann, and M. Faisal, Learning attitude control, in: Proceedings of the 14th IAA Sympo- sium on Small Satellites for Earth System Observation, Berlin, Ger- many, 2023, presented at the 14th IAA Symposium on Small Satellites for Earth System Observation, May 7–12, 2023
work page 2023
-
[16]
M. Carrillo Barrenechea, P. Lachevre, I. Karsli Terjan, M. Watt, C. Her- vas Garcia, Enabling ai-in-the-loop aocs algorithms on in-flight hard- ware: from conception to in-orbit demonstration in ESA OPS-SAT, in: Proceedings of the 12th ESA Guidance, Navigation & Control Confer- ence, ESA, 2023, pp. Sopot, Poland. doi:10.5270/esa-gnc-icatt-2023-131
-
[17]
Airbus Defence and Space, HOPAS on OPS-SAT - executive summary, ESA Contract Report 4000137215/22/NL/GLC/ov, European Space Agency (ESA), implemented as ESA OSIP; Publishing Date: 7 De- cember 2022 (dec 2022)
work page 2022
-
[18]
R. Gerlich, R. Gerlich, S. Montenegro, F. Puppe, K. Djebko, C. Plas- berg, and M. B¨ adorf, It’s the data, stupid! constructive and analytical quality-assurance for ai-based space systems, presented at DASIA 2023, June 6–8, Sitges, Spain, 2023. 53
work page 2023
-
[19]
K. Djebko, T. Baumann, E. Dilger, F. Puppe, and S. Montenegro, Ai- based attitude control for restricted reaction wheels, in: Proceedings of the 15th IAA Symposium on Small Satellites for Earth System Obser- vation, Berlin, Germany, 2025, presented at the 15th IAA Symposium on Small Satellites for Earth System Observation, May 4–8, 2025
work page 2025
-
[20]
B. Grzesik, T. Baumann, T. Walter, F. Flederer, E. Dilger, F. Sittner, S. Gl¨ asner, J. L. Kirchler, M. Tedsen, S. Montenegro, and E. Stoll, Innocube—a wireless satellite platform to demonstrate innovative tech- nologies, Aerospace 8 (5) (2021). doi:10.3390/aerospace8050127. URL https://www.mdpi.com/2226-4310/8/5/127
-
[21]
S. Montenegro, T. Baumann, E. Dilger, F. Sittner, M. Strohmaier, T. Walter, and S. Gl¨ asner, InnoCubE: Der erste drahtloser Satel- lit, Deutsche Gesellschaft f¨ ur Luft- und Raumfahrt - Lilienthal- Oberth e.V.URN: urn:nbn:de:101:1-2022111811082499997154 (2022). doi:10.25967/570007
-
[22]
T. Baumann, E. Dilger, S. Montenegro, F. Sittner, M. Arbab, and T. Walter, InnoCube – First In-Orbit Results of the Fully Wireless Satellite Data Bus, in: Proceedings of SmallSat 2025, Salt Lake City, USA, pre- sented at SmallSat 2025, August 10–13, 2025. doi:10.26077/956f-62d3
-
[23]
Tsimenidis, Limitations of deep neural networks: a discussion of g
S. Tsimenidis, Limitations of deep neural networks: a discussion of g. marcus’ critical appraisal of deep learning, arXiv preprint arXiv:2012.15754 (2020). URL https://arxiv.org/abs/2012.15754
-
[24]
K. Djebko, T. Baumann, E. Dilger, F. Puppe, S. Montenegro, Vere- inigung der steuerung von aktuatoren mit unterschiedlichen zeithori- zonten f¨ ur ki-basierte satelliten-lageregelung mittels subnetz-politik, in: Deutscher Luft- und Raumfahrtkongress 2025, Deutsche Gesellschaft f¨ ur Luft- und Raumfahrt - Lilienthal-Oberth e.V., Bonn, 2025, p. 10. doi:10.2...
-
[25]
Silicon Labs, EFR32FG12 Gecko datasheet Rev. 1.8, https://www.silabs.com/documents/public/data-sheets/ efr32fg12-datasheet.pdf, last visited December 18, 2025 (2022). 54
work page 2025
-
[26]
STMicroelectronics, ASM330LHH Automotive 6-axis inertial mod- ule datasheet, https://www.st.com/resource/en/datasheet/ asm330lhh.pdf, last visited December 18, 2025 (2020)
work page 2025
-
[27]
PNI Sensor, RM3100 Geomagnetic Sensor datasheet, https: //www.unitronic.de/wp-content/uploads/2025/12/21093_DB_ RM3100.pdf, last visited December 18, 2025 (2020)
work page 2025
-
[28]
CelesTrak, SatCat Table: INNOCUBE, https://celestrak.org/ satcat/table-satcat.php?NAME=INNOCUBE, last visited February 14, 2025 (2025)
work page 2025
-
[29]
S. Busch, P. Bangert, S. Dombrovski and K. Schilling, Uwe-3, in-orbit performance and lessons learned of a modular and flexible satellite bus for future pico-satellite formations, Acta Astronautica 117 (2015) 73–89. doi:doi.org/10.1016/j.actaastro.2015.08.002. URL https://www.sciencedirect.com/science/article/pii/ S0094576515003185
-
[30]
PyTorch: An Imperative Style, High-Performance Deep Learning Library
A. Paszke, S. Gross, F. Massa, A. Lerer, J. Bradbury, G. Chanan, T. Killeen, Z. Lin, N. Gimelshein, L. Antiga, A. Desmaison, A. K¨ opf, E. Yang, Z. DeVito, M. Raison, A. Tejani, S. Chilamkurthy, B. Steiner, L. Fang, J. Bai, S. Chintala, Pytorch: An imperative style, high- performance deep learning library, arXiv preprint arXiv:1912.01703 (2019). URL https...
work page internal anchor Pith review Pith/arXiv arXiv 1912
-
[31]
ECSS Secretariat Requirements & Standards Section, Space engineering - machine learning handbook, ECSS-E-HB-40-02A (2024). 55
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.