Recognition: 2 theorem links
· Lean TheoremHeiSD: Hybrid Speculative Decoding for Embodied Vision-Language-Action Models with Kinematic Awareness
Pith reviewed 2026-05-15 09:12 UTC · model grok-4.3
The pith
A hybrid speculative decoding framework with kinematic boundary selection accelerates embodied vision-language-action models up to 2.45 times while preserving high task success rates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
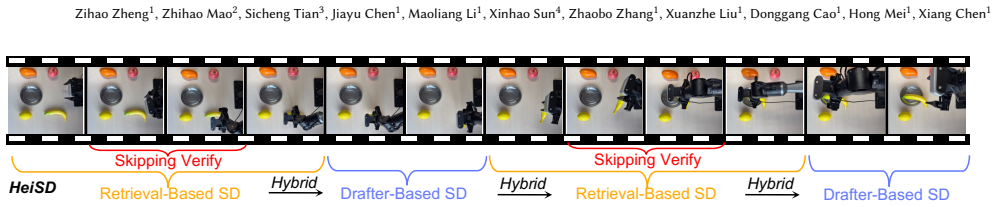
HeiSD integrates drafter-based and retrieval-based speculative decoding for VLA models by introducing a verify-skip mechanism and sequence-wise relaxed acceptance strategy to mitigate rejection and persistent errors, together with a kinematic-based fused metric that automatically selects the hybrid boundary, delivering inference speedups of up to 2.45x in simulation benchmarks and 2.06x to 2.41x in real-world robot scenarios while sustaining high task success rates.
What carries the argument
The kinematic-based fused metric that automatically determines the boundary between drafter-based and retrieval-based speculative decoding paths.
If this is right
- Robot controllers using VLA models can run at higher frame rates in both simulation and physical hardware without retraining the base model.
- The same hybrid structure can be applied to other sequence-generation tasks that exhibit varying motion complexity.
- Real-time safety constraints in embodied systems become easier to satisfy because inference latency is reduced while output quality is held constant.
- Energy consumption per action decreases in battery-powered robots because fewer tokens are generated overall.
- Deployment on edge hardware with limited compute becomes more practical for vision-language-action pipelines.
Where Pith is reading between the lines
- The kinematic metric may generalize to other sensor modalities such as force-torque or depth if the fusion weights are re-tuned.
- A learned version of the boundary selector could replace the hand-crafted fused metric and further reduce manual tuning.
- The approach opens a path to adaptive decoding policies that change not only between drafter and retrieval but also among multiple drafter sizes.
- Integration with existing robot middleware could allow the hybrid decoder to be swapped in as a drop-in acceleration layer.
Load-bearing premise
The kinematic-based fused metric can reliably and automatically choose the correct decoding mode for any given robot task and environment without introducing persistent errors that lower success rates.
What would settle it
A controlled test on an unseen robot manipulation task in which the kinematic metric selects the retrieval path for a high-motion segment, resulting in either zero net speedup or a measurable drop in task success rate.
Figures











read the original abstract
Vision-Language-Action (VLA) Models have become the mainstream solution for robot control, but suffer from slow inference speeds. Speculative Decoding (SD) is a promising acceleration method which can be divided into two categories: drafter-based SD and retrieval-based SD. Each of the two methods demonstrates complementary advantages and limitations when applied to VLA models, leading to the hypothesis that a hybrid approach integrating these two methods will yield better performance. In this paper, we first conduct a series of detailed analyses to reveal the advantages and feasibility of hybrid utilization. However, even with the aforementioned key insights, implementing hybrid SD in VLA models presents several challenges: (1) draft rejection and persistent errors in retrieval-based SD; (2) difficulty in determining the hybrid boundary. To address these, we propose the HeiSD framework. We propose a retrieval-based SD optimization method in HeiSD, which contains a verify-skip mechanism and a sequence-wise relaxed acceptance strategy. Moreover, we proposed a kinematic-based fused metric in HeiSD to automatically determine the hybrid boundary. Experimental results demonstrate that HeiSD attains a speedup of up to 2.45x in simulation benchmarks and 2.06x~2.41x in real-world scenarios, while sustaining a high task success rate.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes HeiSD, a hybrid speculative decoding framework for Vision-Language-Action (VLA) models in robotics. It integrates drafter-based and retrieval-based speculative decoding, introducing a verify-skip mechanism, sequence-wise relaxed acceptance strategy, and a kinematic-based fused metric to automatically determine the hybrid boundary between the two decoding modes. The central empirical claim is that this yields speedups of up to 2.45× in simulation benchmarks and 2.06×–2.41× in real-world scenarios while maintaining high task success rates, addressing issues of draft rejection, persistent retrieval errors, and boundary selection.
Significance. If the kinematic fused metric reliably avoids persistent errors and preserves success rates, the work would provide a practical acceleration technique for deploying VLA models on embodied agents, where inference latency is a critical bottleneck. The domain-specific use of kinematic awareness to guide decoding choices is a targeted contribution that could influence real-time robot control systems. The reported speedups are measured outcomes rather than tautological quantities, strengthening the engineering value if the supporting experiments hold.
major comments (3)
- [Abstract and §5] Abstract and §5 (Experiments): The claim that the kinematic-based fused metric automatically sets the hybrid boundary 'without introducing persistent errors' or lowering success rates is load-bearing for the speedup results, yet no per-task error-rate curves, oracle-boundary ablations, or failure-case analysis across environment variations are provided to verify stability.
- [§4.2] §4.2 (Kinematic-based fused metric): The metric definition and fusion of kinematic features lack explicit threshold selection criteria or sensitivity analysis; without these, it is unclear whether the boundary decisions generalize or risk misclassification that would violate the 'high task success rate' clause.
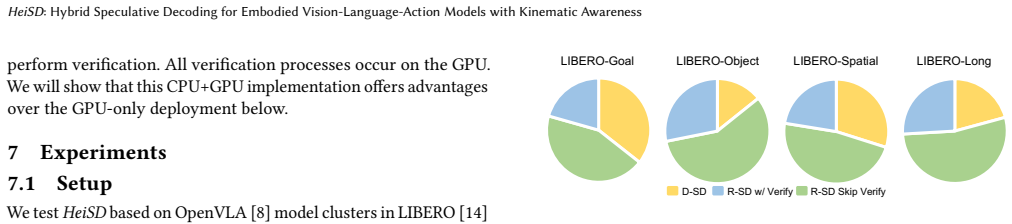
- [§5, Table 2] §5, Table 2 (real-world results): Speedup values (2.06×–2.41×) and success rates are reported without stating the number of trials, variance, or statistical tests, leaving the reliability of the 'sustaining a high task success rate' assertion under-supported.
minor comments (2)
- [§3.3] §3.3 (verify-skip mechanism): The description of how the mechanism interacts with the relaxed acceptance strategy could be expanded with a pseudocode example for clarity.
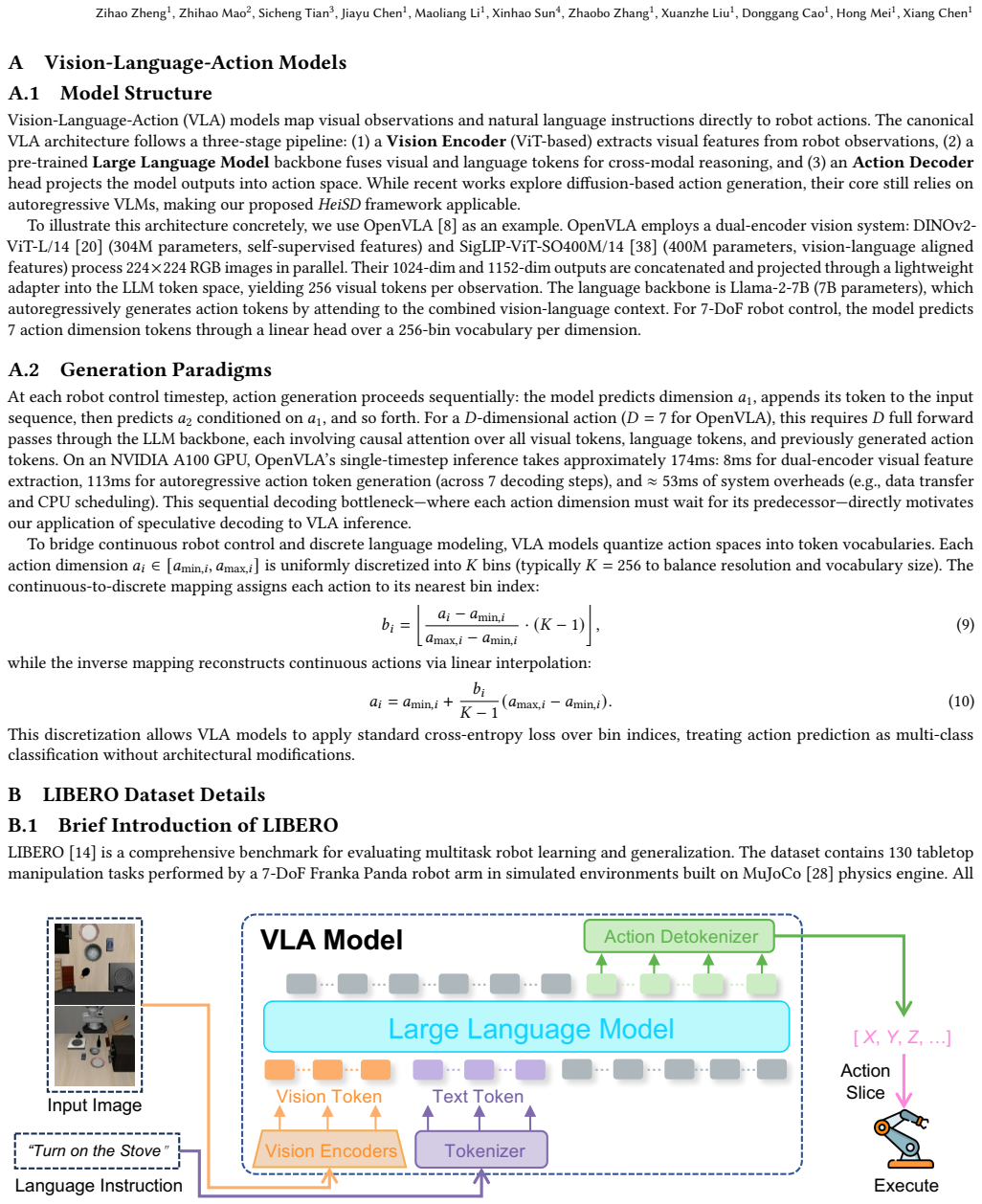
- [Figure 2] Figure 2 (hybrid framework diagram): Labels for the kinematic metric input and boundary decision block are small and could be enlarged for readability.
Simulated Author's Rebuttal
We thank the referee for the insightful comments, which help improve the rigor of our presentation. We address each major comment below by proposing specific revisions to the manuscript.
read point-by-point responses
-
Referee: [Abstract and §5] Abstract and §5 (Experiments): The claim that the kinematic-based fused metric automatically sets the hybrid boundary 'without introducing persistent errors' or lowering success rates is load-bearing for the speedup results, yet no per-task error-rate curves, oracle-boundary ablations, or failure-case analysis across environment variations are provided to verify stability.
Authors: We agree that these analyses would better support the stability claim. In the revised version, we will add per-task error-rate curves in §5, include oracle-boundary ablations to demonstrate the metric's advantage over fixed boundaries, and provide failure-case analysis across environment variations. This will verify that the hybrid boundary selection maintains high success rates without persistent errors. revision: yes
-
Referee: [§4.2] §4.2 (Kinematic-based fused metric): The metric definition and fusion of kinematic features lack explicit threshold selection criteria or sensitivity analysis; without these, it is unclear whether the boundary decisions generalize or risk misclassification that would violate the 'high task success rate' clause.
Authors: We appreciate this observation. The revised manuscript will include explicit threshold selection criteria, derived from cross-validation on held-out tasks, and a sensitivity analysis in §4.2 showing the impact of threshold variations on both inference speedup and task success rates. This will clarify the generalization of boundary decisions. revision: yes
-
Referee: [§5, Table 2] §5, Table 2 (real-world results): Speedup values (2.06×–2.41×) and success rates are reported without stating the number of trials, variance, or statistical tests, leaving the reliability of the 'sustaining a high task success rate' assertion under-supported.
Authors: We thank the referee for highlighting this omission. We will revise Table 2 and the surrounding text in §5 to report the number of trials conducted (50 per scenario), include variance measures such as standard deviation, and add results from statistical tests (paired t-tests) to confirm that success rates are not significantly different from baselines. revision: yes
Circularity Check
No circularity: empirical speedups measured independently of the proposed metric
full rationale
The paper advances an engineering framework (HeiSD) whose central results are measured wall-clock speedups (2.45× simulation, 2.06–2.41× real-world) obtained on concrete robot benchmarks. The kinematic-based fused metric is presented as a heuristic for choosing drafter vs. retrieval segments; its decisions are evaluated by downstream task success rate rather than being fitted to or defined by the same speedup numbers. No equations, self-citations, or ansatzes are shown that would make any reported quantity equivalent to its own tuning inputs by construction. The work is therefore self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
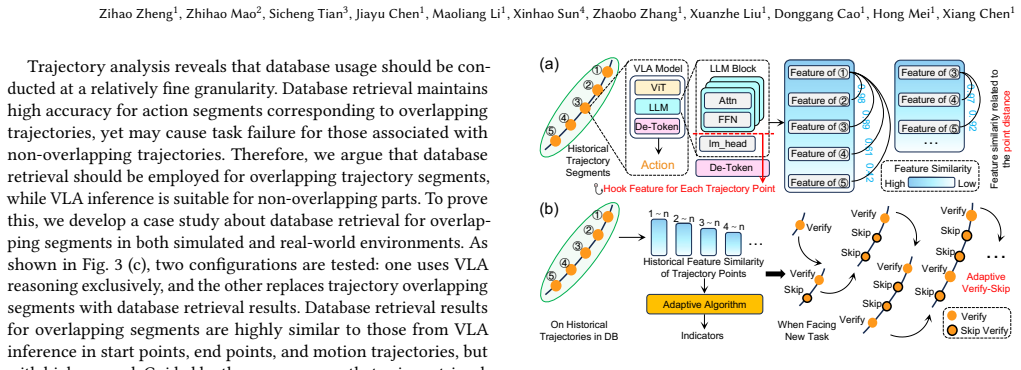
we proposed a kinematic-based fused metric in HeiSD to automatically determine the hybrid boundary... F[w] = α·Norm(R[w]) + (1-α)·Norm(D[w])
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Experimental results demonstrate that HeiSD attains a speedup of up to 2.45x... while sustaining a high task success rate.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 3 Pith papers
-
Realtime-VLA FLASH: Speculative Inference Framework for Diffusion-based VLAs
A new speculative inference system speeds up diffusion VLAs to 19.1 ms average latency (3.04x faster) on LIBERO by replacing most full 58 ms inferences with 7.8 ms draft rounds while preserving task performance.
-
FreqCache: Accelerating Embodied VLN Models with Adaptive Frequency-Guided Token Caching
FreqCache uses frequency domain properties to adaptively select, refresh, and budget token caches in VLN models, delivering 1.59x speedup with negligible overhead.
-
RoboECC: Multi-Factor-Aware Edge-Cloud Collaborative Deployment for VLA Models
RoboECC delivers up to 3.28x speedup for VLA model inference via co-aware segmentation and network-aware adjustment with 2.55-2.62% overhead.
Reference graph
Works this paper leans on
-
[1]
Gregor Bachmann, Sotiris Anagnostidis, Albert Pumarola, Markos Georgopoulos, Artsiom Sanakoyeu, Yuming Du, Edgar Schönfeld, Ali K. Thabet, and Jonas Kohler. 2025. Judge Decoding: Faster Speculative Sampling Requires Going Beyond Model Alignment. InThe Thirteenth International Conference on Learning Representations, ICLR 2025, Singapore, April 24-28, 2025....
work page 2025
- [2]
-
[3]
Sukmin Cho, Sangjin Choi, Taeho Hwang, Jeongyeon Seo, Soyeong Jeong, Huije Lee, Hoyun Song, Jong C Park, and Youngjin Kwon. 2025. Lossless Acceleration of Large Language Models with Hierarchical Drafting based on Temporal Locality in Speculative Decoding.arXiv preprint arXiv:2502.05609(2025)
-
[4]
Ning Ding, Yujia Qin, Guang Yang, Fuchao Wei, Zonghan Yang, Yusheng Su, Shengding Hu, Yulin Chen, Chi-Min Chan, Weize Chen, et al. 2023. Parameter- efficient fine-tuning of large-scale pre-trained language models.Nature machine intelligence5, 3 (2023), 220–235
work page 2023
-
[5]
Zeyu Han, Chao Gao, Jinyang Liu, Jeff Zhang, and Sai Qian Zhang. 2024. Parameter-efficient fine-tuning for large models: A comprehensive survey.arXiv preprint arXiv:2403.14608(2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[6]
Zhenyu He, Zexuan Zhong, Tianle Cai, Jason Lee, and Di He. 2024. Rest: Retrieval- based speculative decoding. InProceedings of the 2024 conference of the North American chapter of the association for computational linguistics: Human language technologies (volume 1: long papers). 1582–1595
work page 2024
-
[7]
Edward J Hu, Yelong Shen, Phillip Wallis, Zeyuan Allen-Zhu, Yuanzhi Li, Shean Wang, Lu Wang, Weizhu Chen, et al. 2022. Lora: Low-rank adaptation of large language models.ICLR1, 2 (2022), 3
work page 2022
-
[8]
Moo Jin Kim, Karl Pertsch, Siddharth Karamcheti, Ted Xiao, Ashwin Balakr- ishna, Suraj Nair, Rafael Rafailov, Ethan Foster, Grace Lam, Pannag Sanketi, et al
-
[9]
Openvla: An open-source vision-language-action model.arXiv preprint arXiv:2406.09246(2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
- [10]
-
[11]
Alan Chi-Man Lee, Wing-Sun Cheng, and Calvin Chun-Kit Chan. 2025. PROMTEC: Fast LLM Inference Decoding using Prompt Multi-Lookup with Template Database and Common Sequences. InFindings of the Association for Computational Linguistics: ACL 2025, Wanxiang Che, Joyce Nabende, Ekaterina Shutova, and Mohammad Taher Pilehvar (Eds.). Association for Computationa...
-
[12]
Jinze Li, Yixing Xu, Guanchen Li, Shuo Yang, Jinfeng Xu, Xuanwu Yin, Dong Li, Edith C. H. Ngai, and Emad Barsoum. 2025. Training-Free Loosely Specu- lative Decoding: Accepting Semantically Correct Drafts Beyond Exact Match. arXiv:2511.22972 [cs.CL] https://arxiv.org/abs/2511.22972
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[13]
Xuanlin Li, Kyle Hsu, Jiayuan Gu, Karl Pertsch, Oier Mees, Homer Rich Walke, Chuyuan Fu, Ishikaa Lunawat, Isabel Sieh, Sean Kirmani, Sergey Levine, Jiajun Wu, Chelsea Finn, Hao Su, Quan Vuong, and Ted Xiao. 2024. Evaluating Real- World Robot Manipulation Policies in Simulation.arXiv preprint arXiv:2405.05941 (2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
- [14]
-
[15]
Bo Liu, Yifeng Zhu, Chongkai Gao, Yihao Feng, Qiang Liu, Yuke Zhu, and Peter Stone. 2023. Libero: Benchmarking knowledge transfer for lifelong robot learning. InAdvances in Neural Information Processing Systems, Vol. 36. 44776–44791
work page 2023
- [16]
-
[17]
Shih-Yang Liu, Chien-Yi Wang, Hongxu Yin, Pavlo Molchanov, Yu-Chiang Frank Wang, Kwang-Ting Cheng, and Min-Hung Chen. 2024. Dora: Weight- decomposed low-rank adaptation. InForty-first International Conference on Ma- chine Learning
work page 2024
-
[18]
Yueen Ma, Zixing Song, Yuzheng Zhuang, Jianye Hao, and Irwin King. 2024. A survey on vision-language-action models for embodied ai.arXiv preprint arXiv:2405.14093(2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[19]
Yunchao Ma, Yizhuang Zhou, Yunhuan Yang, Tiancai Wang, and Haoqiang Fan
- [20]
-
[21]
Soroush Nasiriany, Abhiram Maddukuri, Lance Zhang, Adeet Parikh, Aaron Lo, Abhishek Joshi, Ajay Mandlekar, and Yuke Zhu. 2024. Robocasa: Large-scale simulation of everyday tasks for generalist robots.arXiv preprint arXiv:2406.02523 (2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[22]
Maxime Oquab, Timothée Darcet, Théo Moutakanni, Huy Vo, Marc Szafraniec, Vasil Khalidov, Pierre Fernandez, Daniel Haziza, Francisco Massa, Alaaeldin El- Nouby, et al. 2023. Dinov2: Learning robust visual features without supervision. arXiv preprint arXiv:2304.07193(2023)
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[23]
Abby O’Neill, Abdul Rehman, Abhiram Maddukuri, Abhishek Gupta, Abhishek Padalkar, Abraham Lee, Acorn Pooley, Agrim Gupta, Ajay Mandlekar, Ajinkya Jain, et al. 2024. Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration 0. In2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 6892–6903
work page 2024
- [24]
-
[25]
Karl Pertsch, Kyle Stachowicz, Brian Ichter, Danny Driess, Suraj Nair, Quan Vuong, Oier Mees, Chelsea Finn, and Sergey Levine. 2025. Fast: Efficient action tokenization for vision-language-action models.arXiv preprint arXiv:2501.09747 (2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[26]
Qdrant Team. 2023. Qdrant: High-performance, massive-scale vector database and vector search engine. https://qdrant.tech/. Accessed: 2024-01-08
work page 2023
-
[27]
Jeff Rasley, Samyam Rajbhandari, Olatunji Ruwase, and Yuxiong He. 2020. Deep speed: System optimizations enable training deep learning models with over 100 billion parameters. InProceedings of the 26th ACM SIGKDD international conference on knowledge discovery & data mining. 3505–3506
work page 2020
- [28]
- [29]
-
[30]
Emanuel Todorov, Tom Erez, and Yuval Tassa. 2012. MuJoCo: A physics engine for model-based control. In2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 5026–5033. doi:10.1109/IROS.2012.6386109
-
[31]
Hugo Touvron, Thibaut Lavril, Gautier Izacard, Xavier Martinet, Marie-Anne Lachaux, Timothée Lacroix, Baptiste Rozière, Naman Goyal, Eric Hambro, Faisal Azhar, et al. 2023. Llama: Open and efficient foundation language models.arXiv preprint arXiv:2302.13971(2023)
work page internal anchor Pith review Pith/arXiv arXiv 2023
- [32]
-
[33]
Junjie Wen, Yichen Zhu, Jinming Li, Minjie Zhu, Zhibin Tang, Kun Wu, Zhiyuan Xu, Ning Liu, Ran Cheng, Chaomin Shen, et al . 2025. Tinyvla: Towards fast, data-efficient vision-language-action models for robotic manipulation.IEEE Robotics and Automation Letters(2025)
work page 2025
-
[34]
Zhuofan Wen, Shangtong Gui, and Yang Feng. 2024. Speculative decoding with CTC-based draft model for LLM inference acceleration. InAdvances in Neural Information Processing Systems, Vol. 37. 92082–92100
work page 2024
-
[35]
Lingling Xu, Haoran Xie, Si-Zhao Joe Qin, Xiaohui Tao, and Fu Lee Wang
- [36]
- [37]
-
[38]
Minghao Yan, Saurabh Agarwal, and Shivaram Venkataraman. 2025. Decoding speculative decoding. InProceedings of the 2025 Conference of the Nations of the Americas Chapter of the Association for Computational Linguistics: Human Language Technologies (Volume 1: Long Papers). 6460–6473
work page 2025
- [39]
-
[40]
Yang Yue, Yulin Wang, Bingyi Kang, Yizeng Han, Shenzhi Wang, Shiji Song, Jiashi Feng, and Gao Huang. 2024. Deer-vla: Dynamic inference of multimodal large language models for efficient robot execution. InAdvances in Neural Information Processing Systems, Vol. 37. 56619–56643
work page 2024
-
[41]
Xiaohua Zhai, Basil Mustafa, Alexander Kolesnikov, and Lucas Beyer. 2023. Sigmoid loss for language image pre-training. InProceedings of the IEEE/CVF international conference on computer vision. 11975–11986
work page 2023
-
[42]
Jingyi Zhang, Jiaxing Huang, Sheng Jin, and Shijian Lu. 2024. Vision-language models for vision tasks: A survey.IEEE Transactions on Pattern Analysis and Machine Intelligence46, 8 (2024), 5625–5644
work page 2024
- [43]
-
[44]
Zihao Zheng, Hangyu Cao, Jiayu Chen, Sicheng Tian, Chenyue Li, Maoliang Li, Xinhao Sun, Guojie Luo, and Xiang Chen. 2026. RoboECC: Multi-Factor- Aware Edge-Cloud Collaborative Deployment for VLA Models.arXiv preprint arXiv:2603.20711(2026). Zihao Zheng1, Zhihao Mao 2, Sicheng Tian 3, Jiayu Chen 1, Maoliang Li 1, Xinhao Sun 4, Zhaobo Zhang 1, Xuanzhe Liu 1...
work page internal anchor Pith review Pith/arXiv arXiv 2026
- [45]
-
[46]
Zihao Zheng, Xiuping Cui, Size Zheng, Maoliang Li, Jiayu Chen, Xiang Chen, et al. 2025. MoQa: Rethinking MoE Quantization with Multi-stage Data-model Distribution Awareness.arXiv e-prints(2025), arXiv–2503
work page 2025
-
[47]
Zihao Zheng, Zhihao Mao, Maoliang Li, Jiayu Chen, Xinhao Sun, Zhaobo Zhang, Donggang Cao, Hong Mei, and Xiang Chen. 2026. KERV: Kinematic-Rectified Speculative Decoding for Embodied VLA Models.arXiv preprint arXiv:2603.01581 (2026)
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[48]
Zihao Zheng, Sicheng Tian, Hangyu Cao, Chenyue Li, Jiayu Chen, Maoliang Li, Xinhao Sun, Hailong Zou, Guojie Luo, and Xiang Chen. 2026. RAPID: Redundancy-Aware and Compatibility-Optimal Edge-Cloud Partitioned Infer- ence for Diverse VLA models.arXiv preprint arXiv:2603.07949(2026)
-
[49]
Brianna Zitkovich, Tianhe Yu, Sichun Xu, Peng Xu, Ted Xiao, Fei Xia, Jialin Wu, Paul Wohlhart, Stefan Welker, Ayzaan Wahid, et al. 2023. Rt-2: Vision-language action models transfer web knowledge to robotic control. InConference on Robot Learning. PMLR, 2165–2183
work page 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.