Recognition: no theorem link
From Perception to Autonomous Computational Modeling: A Multi-Agent Approach
Pith reviewed 2026-05-10 17:51 UTC · model grok-4.3
The pith
Coordinated LLM agents can autonomously execute the full computational mechanics workflow from a photograph of an engineering part to a code-compliant analysis report.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
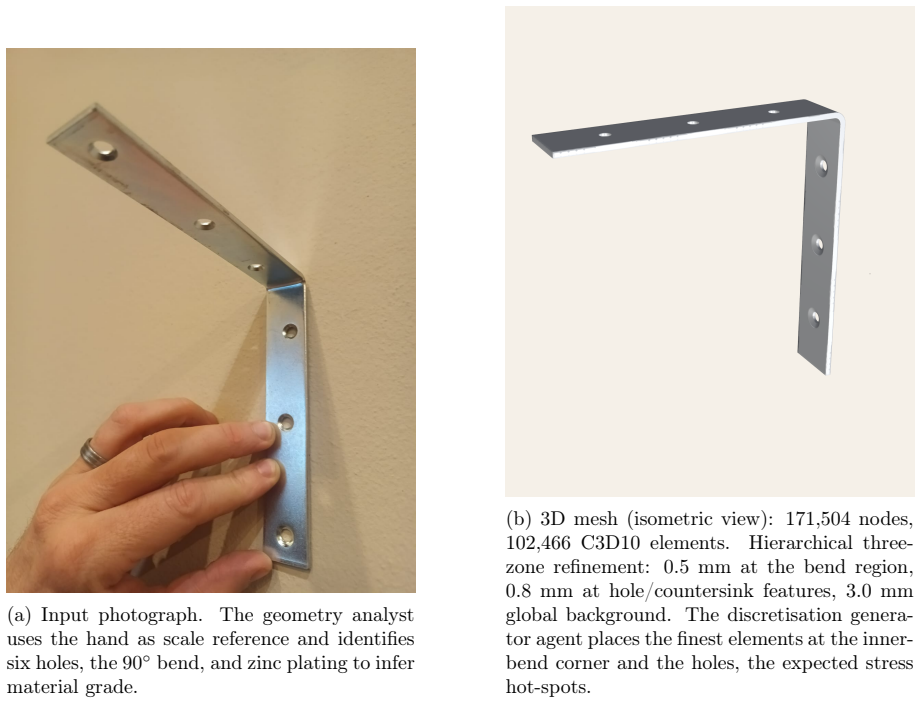
The authors formalise LLM agents as conditioned operators that act on a shared context space and incorporate quality gates to trigger conditional iteration across pipeline layers. They supply a mathematical treatment for deriving engineering quantities from perceptual data under uncertainty by combining interval bounds, probability densities, and fuzzy membership functions, together with a rule for task-dependent conservatism that resolves conflicting parameter directions across different limit states. The framework is applied end-to-end to a photograph of a steel L-bracket, automatically generating a 171504-node tetrahedral mesh, executing seven separate analyses under three boundary-case假设
What carries the argument
Coordinated LLM agents operating as conditioned operators on a shared context space with quality gates that enforce conditional iteration, supported by an uncertainty model using interval bounds, probability densities, and fuzzy functions plus task-dependent conservatism.
If this is right
- The entire analysis chain from image to engineering report can complete in one autonomous iteration without manual correction.
- Uncertainty arising from perceptual data can be represented and propagated using intervals, densities, and fuzzy sets.
- Opposing trends in material or geometric parameters across different limit states can be handled consistently through task-dependent conservatism.
- Multiple boundary-condition hypotheses can be explored automatically within the same workflow.
- The final output includes quantified redesign guidance that satisfies code compliance checks.
Where Pith is reading between the lines
- If the method generalises beyond the single L-bracket example, field photographs could feed directly into on-site structural assessments.
- The same agent-coordination pattern might be adapted to other simulation domains such as thermal or fluid problems.
- Repeated application to the same component could allow the system to refine its uncertainty estimates from accumulating results.
- As underlying language models improve at technical reasoning, the framework's accuracy on geometry and material inference would be expected to increase.
Load-bearing premise
That the LLM agents can extract accurate geometry, infer correct material properties, generate valid meshes, and perform reliable limit-state assessments from a single photograph without introducing errors that quality gates fail to catch.
What would settle it
Running the same pipeline on additional photographs of the identical L-bracket or on a physically tested specimen and finding that the autonomously predicted failure load or mode deviates substantially from laboratory measurements would disprove reliable autonomous performance.
Figures







read the original abstract
We present a solver-agnostic framework in which coordinated large language model (LLM) agents autonomously execute the complete computational mechanics workflow, from perceptual data of an engineering component through geometry extraction, material inference, discretisation, solver execution, uncertainty quantification, and code-compliant assessment, to an engineering report with actionable recommendations. Agents are formalised as conditioned operators on a shared context space with quality gates that introduce conditional iteration between pipeline layers. We introduce a mathematical framework for extracting engineering information from perceptual data under uncertainty using interval bounds, probability densities, and fuzzy membership functions, and introduce task-dependent conservatism to resolve the ambiguity of what `conservative' means when different limit states are governed by opposing parameter trends. The framework is demonstrated through a finite element analysis pipeline applied to a photograph of a steel L-bracket, producing a 171,504-node tetrahedral mesh, seven analyses across three boundary condition hypotheses, and a code-compliant assessment revealing structural failure with a quantified redesign. All results are presented as generated in the first autonomous iteration without manual correction, reinforcing that a professional engineer must review and sign off on any such analysis.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to present a solver-agnostic multi-agent LLM framework that autonomously executes the full computational mechanics workflow from perceptual input (a photograph of an engineering component) through geometry extraction, material inference, discretization, solver execution, uncertainty quantification, and code-compliant assessment to a final engineering report. Agents operate as conditioned operators on a shared context space equipped with quality gates that enable conditional iteration. A mathematical framework using interval bounds, probability densities, and fuzzy membership functions is introduced for handling uncertainty in perceptual data, along with task-dependent conservatism to address ambiguity in conservative choices across opposing limit-state trends. The framework is demonstrated on a single photograph of a steel L-bracket, yielding a 171,504-node tetrahedral mesh, seven FEA runs under three boundary-condition hypotheses, and a failure assessment with quantified redesign recommendations, all generated autonomously in the first iteration without manual correction.
Significance. If the reliability of the autonomous pipeline can be established, the work would represent a notable step toward integrating perception, modeling, and regulatory assessment in computational engineering. The combination of multi-agent coordination, quality gates, and a mixed uncertainty formalism (intervals, probabilities, fuzzy sets) directly targets practical barriers in applying LLMs to technical workflows. The single-case demonstration, while illustrative, currently limits broader significance; strengthening it with quantitative validation would position the contribution as a foundation for reproducible autonomous analysis tools.
major comments (2)
- [Demonstration] Demonstration section: The central claim that coordinated LLM agents autonomously produce a usable 171,504-node tetrahedral mesh, seven FEA runs, and a code-compliant failure assessment directly from a single photograph rests on a single first-iteration run. No quantitative checks are reported—such as comparison of extracted geometry dimensions to the physical L-bracket, mesh-quality metrics (aspect ratio, skewness, or Jacobian determinants) against a reference discretization, material-property inference error relative to known steel values, or sensitivity of the final safety factor to the three boundary-condition hypotheses. Without these, it is impossible to confirm that quality gates prevented propagation of errors or that the reported failure conclusion is based on accurate intermediates rather than plausible artifacts.
- [Mathematical framework] Mathematical framework for uncertainty and task-dependent conservatism: The task-dependent conservatism parameters are introduced to resolve ambiguity when different limit states are governed by opposing parameter trends, yet they are listed among the free parameters and appear defined with reference to the specific limit states under evaluation. This risks circularity, as the conservatism choice depends on the very trends the framework is meant to assess objectively, potentially reducing generality beyond the L-bracket case.
minor comments (2)
- The description of the shared context space and quality gates would benefit from an explicit pseudocode listing or flowchart showing how iteration is triggered and how information is passed between agents; this would improve reproducibility without altering the technical content.
- Notation for the combined interval-probabilistic-fuzzy representation could be standardized more clearly (e.g., consistent symbols for bounds versus membership functions) to avoid ambiguity when reading the uncertainty propagation steps.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major comment below and indicate where revisions will be made to strengthen the manuscript.
read point-by-point responses
-
Referee: [Demonstration] Demonstration section: The central claim that coordinated LLM agents autonomously produce a usable 171,504-node tetrahedral mesh, seven FEA runs, and a code-compliant failure assessment directly from a single photograph rests on a single first-iteration run. No quantitative checks are reported—such as comparison of extracted geometry dimensions to the physical L-bracket, mesh-quality metrics (aspect ratio, skewness, or Jacobian determinants) against a reference discretization, material-property inference error relative to known steel values, or sensitivity of the final safety factor to the three boundary-condition hypotheses. Without these, it is impossible to confirm that quality gates prevented propagation of errors or that the reported failure conclusion is based on accurate intermediates rather than plausible artifacts.
Authors: We agree that the demonstration would benefit from additional context on validation. The manuscript presents a proof-of-concept for autonomous end-to-end execution from perceptual input, with all outputs generated in a single first-iteration run without manual correction. Because the sole input is an unlabeled photograph, no reference measurements or ground-truth model exist for direct quantitative comparison of geometry, material properties, or mesh quality. The quality gates enforce internal consistency within the pipeline layers rather than external accuracy. In revision we will expand the demonstration section to explicitly discuss this limitation, report any additional mesh statistics derivable from the generated output (e.g., element type distribution and node count already stated), and reiterate that the framework requires professional engineering review before use. This preserves the paper's focus on autonomy while addressing the concern. revision: partial
-
Referee: [Mathematical framework] Mathematical framework for uncertainty and task-dependent conservatism: The task-dependent conservatism parameters are introduced to resolve ambiguity when different limit states are governed by opposing parameter trends, yet they are listed among the free parameters and appear defined with reference to the specific limit states under evaluation. This risks circularity, as the conservatism choice depends on the very trends the framework is meant to assess objectively, potentially reducing generality beyond the L-bracket case.
Authors: The task-dependent conservatism parameters are user-specified inputs chosen a priori on the basis of known engineering relationships between parameters and opposing limit states; they are not computed from or conditioned on the numerical results of the current analysis. Their role is to encode application-specific judgment when the direction of conservatism is ambiguous, while the subsequent uncertainty propagation and assessment remain objective. We will revise the mathematical-framework section to state this distinction clearly, emphasize that the parameters are selected independently of analysis outcomes, and include guidance on their general selection to improve applicability beyond the demonstrated case. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper presents a multi-agent LLM framework for end-to-end computational mechanics from perceptual data, introducing interval/fuzzy uncertainty handling and task-dependent conservatism as new formalisms. No equations or steps reduce by construction to inputs (no self-definitional loops, no fitted parameters relabeled as predictions, no load-bearing self-citations or imported uniqueness theorems). The single L-bracket demonstration is offered as an autonomous run rather than a tautological output, and the central claims rest on external LLM capabilities plus the introduced formalism rather than circular reduction. The derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- task-dependent conservatism parameters
axioms (2)
- domain assumption LLM agents can be formalised as conditioned operators on a shared context space that execute engineering tasks reliably when quality gates are applied.
- standard math Perceptual data can be converted to engineering quantities using interval bounds, probability densities, and fuzzy membership functions.
invented entities (1)
-
shared context space with quality gates
no independent evidence
Reference graph
Works this paper leans on
-
[1]
M. Chen, J. Tworek, H. Jun, Q. Yuan, H. P. de Oliveira Pinto, J. Kaplan, H. Ed- wards, Y. Burda, N. Joseph, G. Brockman, A. Ray, R. Puri, G. Krueger, M. Petrov, H. Khlaaf, G. Sastry, P. Mishkin, B. Chan, S. Gray, N. Ryder, M. Pavlov, A. Power, L. Kaiser, M. Bavarian, C. Winter, P. Tillet, F. P. Such, D. Cummings, M. Plappert, F. Chantzis, E. Barnes, A. He...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2107.03374 2021
-
[2]
R. Li, L. B. Allal, Y. Zi, N. Muennighoff, D. Kocetkov, C. Mou, M. Marone, C. Akiki, J. Li, J. Chim, Q. Liu, E. Zheltonozhskii, T. Y. Zhuo, T. Wang, O. Dehaene, M. Davaadorj, J. Lamy-Poirier, J. Monteiro, O. Shliazhko, N. Gontier, N. Meade, A. Zebaze, M. H. Yee, L. K. Umapathi, J. Zhu, B. Lipkin, M. Oblokulov, Z. Wang, R. Murthy, J. Stillerman, S. S. Pate...
work page internal anchor Pith review doi:10.48550/arxiv.2305.06161 2023
-
[3]
Galactica: A Large Language Model for Science
R. Taylor, M. Kardas, G. Cucurull, T. Scialom, A. Hartshorn, E. Saravia, A. Poulton, V. Kerkez, R. Stojnic, Galactica: A large language model for science, arXiv preprint arXiv:2211.09085, 2022. doi:10.48550/arXiv.2211.09085
work page internal anchor Pith review doi:10.48550/arxiv.2211.09085 2022
-
[4]
Solving Quantitative Reasoning Problems with Language Models
A. Lewkowycz, A. Andreassen, D. Dohan, E. Dyer, H. Michalewski, V. Ramasesh, A. Slone, C. Anil, I. Schlag, T. Gutman-Solo, Y. Wu, B. Neyshabur, G. Gur-Ari, V. Misra, Solving quantitative reasoning problems with language models, in: Advances in Neural Information Processing Systems 35, 2022. doi:10.48550/arXiv.2206.14858
work page internal anchor Pith review doi:10.48550/arxiv.2206.14858 2022
-
[5]
OpenAI, GPT-4 technical report, arXiv preprint arXiv:2303.08774, 2023. doi:10.48550/arXiv.2303.08774
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2303.08774 2023
-
[6]
Computer Methods in Applied Mechanics and Engineering 403, 115731
K. Linka, E. Kuhl, A new family of Constitutive Artificial Neural Networks towards au- tomated model discovery, Computer Methods in Applied Mechanics and Engineering 403, Part A, (2023) 115731. doi:10.1016/j.cma.2022.115731
-
[7]
M.J. Buehler, MechGPT, a language-based strategy for mechanics and materials modeling that connects knowledge across scales, disciplines and modalities, Applied Mechanics Re- views 76 (2) (2024) 021001. doi:10.1115/1.4063843
-
[8]
J. Guo, C. Park, D. Qian, T.J.R. Hughes, W.K. Liu, Large language model-empowered next-generation computer-aided engineering, Computer Methods in Applied Mechanics and Engineering 450 (2026) 118591. doi:10.1016/j.cma.2025.118591
-
[9]
Y. Qi, R. Xu, X. Chu, FeaGPT: an end-to-end agentic-AI for finite element analysis, arXiv preprint arXiv:2510.21993, 2025. doi:10.48550/arXiv.2510.21993
-
[10]
ALL-FEM: Agentic Large Language models Fine-tuned for Finite Element Methods
R. Deotale, A. Srinivasan, Y. Tian, T. Zhang, P. P. Vlachos, and H. Gomez. ALL-FEM: Agentic Large Language models Fine-tuned for Finite Element Methods. arXiv preprint arXiv:2603.21011, 2026. doi:10.48550/arXiv.2603.21011 29
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2603.21011 2026
-
[11]
M. Raissi, P. Perdikaris, G.E. Karniadakis, Physics-informed neural networks: A deep learn- ing framework for solving forward and inverse problems involving nonlinear partial differ- ential equations, Journal of Computational Physics 378 (2019) 686–707. doi:10.1016/j.jcp.2018.10.045
-
[12]
Kevrekidis, Lu Lu, Paris Perdikaris, Sifan Wang, and Liu Yang
G.E. Karniadakis, I.G. Kevrekidis, L. Lu, P. Perdikaris, S. Wang, L. Yang, Physics-informed machine learning, Nature Reviews Physics 3 (2021) 422–440. doi:10.1038/s42254-021-00314-5
-
[13]
L. Lu, P. Jin, G. Pang, Z. Zhang, G.E. Karniadakis, Learning nonlinear operators via DeepONet based on the universal approximation theorem of operators, Nature Machine Intelligence 3 (2021) 218–229. doi:10.1038/s42256-021-00302-5
-
[14]
Z. Li, N. Kovachki, K. Azizzadenesheli, B. Liu, K. Bhattacharya, A. Stuart, A. Anandku- mar, Fourier neural operator for parametric partial differential equations, in: International Conference on Learning Representations, 2021. doi:10.48550/arXiv.2010.08895
work page internal anchor Pith review doi:10.48550/arxiv.2010.08895 2021
-
[15]
J.H. Keyak, I.Y. Lee, H.B. Skinner, Correlations between orthogonal mechanical properties and density of trabecular bone: use of different densitometric measures, Journal of Biomed- ical Materials Research 28 (11) (1994) 1329–1336. doi:10.1002/jbm.820281111
-
[16]
S.J. Hollister, N. Kikuchi, Homogenization theory and digital imaging: A basis for studying the mechanics and design principles of bone tissue, Biotechnology and Bioengineering 43 (7) (1994) 586–596. doi:10.1002/bit.260430708
-
[17]
Wooldridge, An Introduction to MultiAgent Systems, 2nd Edition, John Wiley & Sons,
M. Wooldridge, An Introduction to MultiAgent Systems, 2nd Edition, John Wiley & Sons,
-
[18]
ISBN: 978-0-470-51946-2
-
[19]
A. Dorri, S.S. Kanhere, R. Jurdak, Multi-agent systems: A survey, IEEE Access 6 (2018) 28573–28593. doi:10.1109/ACCESS.2018.2831228
-
[20]
S. Hong, M. Zhuge, J. Chen, X. Zheng, Y. Cheng, C. Zhang, J. Wang, Z. Wang, S. K. S. Yau, Z. Lin, L. Zhou, C. Ran, L. Xiao, C. Wu, and J. Schmidhuber, MetaGPT: Meta program- ming for a multi-agent collaborative framework, in: International Conference on Learning Representations, 2024. doi:10.48550/arXiv.2308.00352
work page internal anchor Pith review doi:10.48550/arxiv.2308.00352 2024
-
[21]
Q. Wu, G. Bansal, J. Zhang, Y. Wu, B. Li, E. Zhu, L. Jiang, X. Zhang, S. Zhang, J. Liu, A. H. Awadallah, R. W. White, D. Burger, and C. Wang, AutoGen: Enabling next-gen LLM applications via multi-agent conversation, First Conference on Language Modeling, 1328, 2024. COLM: 1328
2024
-
[22]
S. Yao, J. Zhao, D. Yu, N. Du, I. Shafran, K. Narasimhan, Y. Cao, ReAct: Synergizing reasoning and acting in language models, in: International Conference on Learning Repre- sentations, 2023. doi:10.48550/arXiv.2210.03629
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2210.03629 2023
-
[23]
CorpusID:258833055
N.Shinn, F.Cassano, E.Berman, A.Gopinath, K.Narasimhan, S.Yao, Reflexion: Language agents with verbal reinforcement learning, in: Advances in Neural Information Processing 30 Systems 36, 2023. CorpusID:258833055
2023
-
[24]
Autonomous chemical research with large language models
D.A. Boiko, R. MacKnight, B. Kline, G. Gomes, Autonomous chemical research with large language models, Nature 624 (2023) 570–578. doi:10.1038/s41586-023-06792-0
-
[25]
A.M. Bran, S. Cox, O. Schilter, C. Baldassari, A.D. White, P. Schwaller, Augmenting large- language models with chemistry tools, Nature Machine Intelligence 6 (5) (2024) 525–535. doi:10.1038/s42256-024-00832-8
-
[26]
C. Geuzaine, J.-F. Remacle, Gmsh: A 3-D finite element mesh generator with built-in pre- and post-processing facilities, International Journal for Numerical Methods in Engineering 79 (11) (2009) 1309–1331. doi:10.1002/nme.2579
-
[27]
Dhondt, The Finite Element Method for Three-Dimensional Thermomechanical Appli- cations, Wiley, 2004
G. Dhondt, The Finite Element Method for Three-Dimensional Thermomechanical Appli- cations, Wiley, 2004. doi:10.1002/0470021217
-
[28]
T.D. Blacker, W.J. Bohnhoff, T.L. Edwards, J.R. Hipp, R.R. Lober, S.A. Mitchell, G.D. Sjaardema, T.J. Tautges, T.J. Wilson, W.R. Oakes, CUBIT mesh generation envi- ronment, Volume 1: Users manual, Technical Report SAND94-1100, Sandia National Lab- oratories, 1994. doi:10.2172/10176386
-
[29]
Eurocode 3: Design of steel structures
CEN, EN 1993-1-1:2005 – Eurocode 3: Design of Steel Structures, Brussels, 2005. Eurocode 3: Design of steel structures
1993
-
[30]
CEN, EN 1990:2002
CEN, EN 1990:2002 – Eurocode: Basis of Structural Design, Brussels, 2002. CEN, EN 1990:2002
1990
-
[31]
https://www.aisc.org/aisc/publications/current-standards/aisc-360/
AISC, ANSI/AISC 360-22, Chicago, 2022. https://www.aisc.org/aisc/publications/current-standards/aisc-360/
2022
-
[32]
ISBN: 978-1-76072-947-9
Standards Australia, AS 4100:2020 – Steel Structures, Sydney, 2020. ISBN: 978-1-76072-947-9
2020
-
[33]
9781760720612
StandardsAustralia/StandardsNewZealand, AS/NZS4600:2018–Cold-formedSteelStruc- tures, Sydney, 2018. 9781760720612
2018
-
[34]
W.L. Oberkampf, C.J. Roy, Verification and Validation in Scientific Computing, Cambridge University Press, 2010. doi:10.1017/CBO9780511760396
-
[35]
Roache, Verification and Validation in Computational Science and Engineering, Her- mosa, 1998
P.J. Roache, Verification and Validation in Computational Science and Engineering, Her- mosa, 1998. ISBN: 978-0-913478-08-0. 978-0913478080
1998
-
[36]
W.D. Pilkey, D.F. Pilkey, Peterson’s Stress Concentration Factors, 3rd Ed., Wiley, 2008. doi:10.1002/9780470211106
-
[37]
Moore, Interval Analysis, Prentice-Hall, 1966
R.E. Moore, Interval Analysis, Prentice-Hall, 1966. ISSN 2577-9435
1966
-
[38]
Prince- ton University Press, Princeton, NJ, 2009
A. Ben-Tal, L. El Ghaoui, A. Nemirovski, Robust Optimization, Princeton University Press, 2009. doi:10.1515/9781400831050 31
-
[39]
F. Tao, H. Zhang, A. Liu, A.Y.C. Nee, Digital twin in industry: State-of-the-art, IEEE Transactions on Industrial Informatics 15 (4) (2019) 2405–2415. doi:10.1109/TII.2018.2873186
-
[40]
https://docs.anthropic.com/en/docs/about-claude/models(accessed 8 April 2026)
Anthropic, Claude Opus 4.6 Model Card, February 2026. https://docs.anthropic.com/en/docs/about-claude/models(accessed 8 April 2026)
2026
-
[41]
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A.N. Gomez, Ł. Kaiser, I. Polo- sukhin, Attention is all you need, in: Advances in Neural Information Processing Systems 30, 2017. doi:10.48550/arXiv.1706.03762
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1706.03762 2017
-
[42]
Aparticlemethodforhistory-dependentmaterials
D. Sulsky, Z. Chen, H.L. Schreyer, A particle method for history-dependent materials, Com- puter Methods in Applied Mechanics and Engineering 118 (1–2) (1994) 179–196. doi:10.1016/0045-7825(94)90112-0
-
[43]
D. Sulsky, S.-J. Zhou, H.L. Schreyer, Application of a particle-in-cell method to solid me- chanics, Computer Physics Communications 87 (1–2) (1995) 236–252. doi:10.1016/0010-4655(94)00170-7
-
[44]
Reformulation of elasticity theory for discontinuities and long-range forces
S.A. Silling, Reformulation of elasticity theory for discontinuities and long-range forces, Journal of the Mechanics and Physics of Solids 48 (1) (2000) 175–209. doi:10.1016/S0022-5096(99)00029-0
-
[45]
Peridynamic States and Constitutive Modeling
S.A. Silling, M. Epton, O. Weckner, J. Xu, E. Askari, Peridynamic states and constitutive modeling, Journal of Elasticity 88 (2) (2007) 151–184. doi:10.1007/s10659-007-9125-1
-
[46]
Monaghan, Smoothed particle hydrodynamics, Reports on Progress in Physics 68 (8) (2005) 1703
J.J. Monaghan, Smoothed particle hydrodynamics, Reports on Progress in Physics 68 (8) (2005) 1703. doi:10.1088/0034-4885/68/8/R01
-
[47]
G.R. Liu, M.B. Liu, Smoothed Particle Hydrodynamics, World Scientific, 2003. doi:10.1142/5340
- [48]
-
[49]
O.C. Zienkiewicz, J.Z. Zhu, A simple error estimator and adaptive procedure for practical engineering analysis, International Journal for Numerical Methods in Engineering 24 (2) (1987) 337–357. doi:10.1002/nme.1620240206
-
[50]
A. Logg, K.-A. Mardal, G. Wells (Eds.), Automated Solution of Differential Equations by the Finite Element Method: The FEniCS Book, Springer, 2012. doi:10.1007/978-3-642-23099-8
-
[51]
D. Arndt, W. Bangerth, B. Blais, M. Fehling, R. Gassmöller, T. Heister, L. Heltai, U. Köcher, M. Kronbichler, M. Maier, P. Munch, J. P. Pelteret, S. Proell, K. Simon, B. Turcksin, D. Wells, and J. Zhang, The deal.II library, version 9.3, Journal of Numer- ical Mathematics 29 (3) (2021) 171–186. doi:10.1515/jnma-2021-0081 32
-
[52]
G. Chourdakis, K. Davis, B. Rodenberg, M. Schulte, F. Simonis, B. Uekermann, G. Abrams, H. J. Bungartz, L. C. Yau, I. Desai, K. Eder, R. Hertrich, F. Lindner, A. Rusch, D. Sashko, D. Schneider, A. Totounferoush, D. Volland, P. Vollmer, and O. Z. Koseomur, preCICE v2: A sustainable and user-friendly coupling library, Open Research Europe 2 (2022) 51. doi:1...
-
[53]
V. Smilauer, E. Catalano, B. Chareyre, S. Dorofeenko, J. Duriez, N. Dyck, J. Elias, B. Er, A. Eulitz, A. Gladky, N. Guo, C. Jakob, F. Kneib, J. Kozicki, D. Marzougui, R. Maurin, C. Modenese, L. Scholtes, L. Sibille, J. Stransky, T. Sweijen, K. Thoeni, C. Yuan, Yade Documentation, 2nd Edition, The Yade Project, 2015. doi:10.5281/zenodo.34073
-
[54]
T. Weinhart, L. Orefice, M. Post, M.P. van Schrojenstein Lantman, I.F.C. Denissen, D.R. Tunuguntla, J.M.F. Tsang, H. Cheng, M.Y. Shaheen, H. Shi, P. Rapino, E. Grannonio, N. Losacco, J. Barbosa, L. Jing, J.E. Alvarez Naranjo, S. Roy, W.K. den Otter, A.R Thorn- ton, Fast, flexible particle simulations—an introduction to MercuryDPM, Computer Physics Communi...
-
[55]
J.L. Schönberger, J.-M. Frahm, Structure-from-motion revisited, in: Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016, pp. 4104– 4113. doi:10.1109/CVPR.2016.445
-
[56]
J.M. Domínguez, G. Fourtakas, C. Altomare, R.B. Canelas, A. Tafuni, O. García-Feal, I. Martínez-Estévez, A. Mokos, R. Vacondio, A.J.C. Crespo, B.D. Rogers, P.K. Stansby, M. Gómez-Gesteira, DualSPHysics: from fluid dynamics to multiphysics problems, Compu- tational Particle Mechanics 9 (5) (2022) 867–895. doi:10.1007/s40571-021-00404-2
-
[57]
A.P. Thompson, H.M. Aktulga, R. Berger, D.S. Bolintineanu, W.M. Brown, P.S. Crozier, P.J. in ’t Veld, A. Kohlmeyer, S.G. Moore, T.D. Nguyen, R. Shan, M.J. Stevens, J. Tranchida, C. Trott, S.J. Plimpton, LAMMPS—a flexible simulation tool for particle- based materials modeling at the atomic, meso, and continuum scales, Computer Physics Communications 271 (2...
-
[58]
C. Kloss, C. Goniva, A. Hager, S. Amberger, S. Pirker, Models, algorithms and validation for opensource DEM and CFD–DEM, Progress in Computational Fluid Dynamics 12 (2–3) (2012) 140–152. doi:10.1504/PCFD.2012.047457
-
[59]
N. Govender, D.N. Wilke, S. Kok, Blaze-DEMGPU: Modular high performance DEM frame- work for the GPU architecture, SoftwareX 5 (2016) 62–66. doi:10.1016/j.softx.2016.04.004
-
[60]
H.G. Weller, G. Tabor, H. Jasak, C. Fureby, A tensorial approach to computational con- tinuum mechanics using object-oriented techniques, Computers in Physics 12 (6) (1998) 620–631. doi:10.1063/1.168744
-
[61]
T.D. Economon, F. Palacios, S.R. Copeland, T.W. Lukaczyk, J.J. Alonso, SU2: an open- source suite for multiphysics simulation and design, AIAA Journal 54 (3) (2016) 828–846. doi:10.2514/1.J053813 33
-
[62]
Generative Adversarial Networks
I. Goodfellow, J. Pouget-Abadie, M. Mirza, B. Xu, D. Warde-Farley, S. Ozair, A. Courville, Y. Bengio, Generative adversarial nets, in: Advances in Neural Information Processing Systems 27, 2014. doi:10.48550/arXiv.1406.2661
work page internal anchor Pith review doi:10.48550/arxiv.1406.2661 2014
-
[63]
Training language models to follow instructions with human feedback
L. Ouyang, J. Wu, X. Jiang, D. Almeida, C. L. Wainwright, P. Mishkin, C. Zhang, S. Agar- wal, K. Slama, A. Ray, J. Schulman, J. Hilton, F. Kelton, L. Miller, M. Simens, A. Askell, P. Welinder, P. Christiano, J. Leike, R. Lowe, Training language models to follow instruc- tions with human feedback, in: Advances in Neural Information Processing Systems 35, 2...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2203.02155 2022
-
[64]
P. Christiano, J. Leike, T. B. Brown, M. Martic, S. Legg, D. Amodei, Deep reinforcement learning from human preferences, in: Advances in Neural Information Processing Systems 30, 2017. doi:10.48550/arXiv.1706.03741
-
[65]
Direct Preference Optimization: Your Language Model is Secretly a Reward Model
R. Rafailov, A. Sharma, E. Mitchell, S. Ermon, C. D. Manning, C. Finn, Direct preference optimization: your language model is secretly a reward model, in: Advances in Neural Information Processing Systems 36, 2023. doi:10.48550/arXiv.2305.18290
work page internal anchor Pith review doi:10.48550/arxiv.2305.18290 2023
-
[66]
A. Kirillov, E. Mintun, N. Ravi, H. Mao, C. Rolland, L. Gustafson, T. Xiao, S. Whitehead, A. C. Berg, W.-Y. Lo, P. Dollár, R. Girshick, Segment Anything, in: Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2023, pp. 4015–4026. doi:10.1109/ICCV51070.2023.00371
-
[67]
Learning Transferable Visual Models From Natural Language Supervision
A. Radford, J. W. Kim, C. Hallacy, A. Ramesh, G. Goh, S. Agarwal, G. Sastry, A. Askell, P. Mishkin, J. Clark, G. Krueger, I. Sutskever, Learning transferable visual models from natural language supervision, in: Proceedings of the 38th International Conference on Ma- chine Learning, PMLR 139, 2021, pp. 8748–8763. doi:10.48550/arXiv.2103.00020
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2103.00020 2021
-
[68]
L. A. Zadeh, Fuzzy sets, Information and Control 8 (3) (1965) 338–353. doi:10.1016/S0019-9958(65)90241-X
-
[69]
B. Ni, M. J. Buehler, MechAgents: Large language model multi-agent collaborations can solve mechanics problems, generate new data, and integrate knowledge, Extreme Mechanics Letters 67 (2024) 102131. doi:10.1016/j.eml.2024.102131
-
[70]
C. J. Roy, W. L. Oberkampf, A comprehensive framework for verification, validation, and uncertainty quantification in scientific computing, Computer Methods in Applied Mechanics and Engineering 200 (25–28) (2011) 2131–2144. doi:10.1016/j.cma.2011.03.016
-
[71]
ISBN 9780791873168
ASME, Standard for Verification and Validation in Computational Solid Mechanics, ASME V&V 10-2019, American Society of Mechanical Engineers, New York, 2019. ISBN 9780791873168. 34
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.