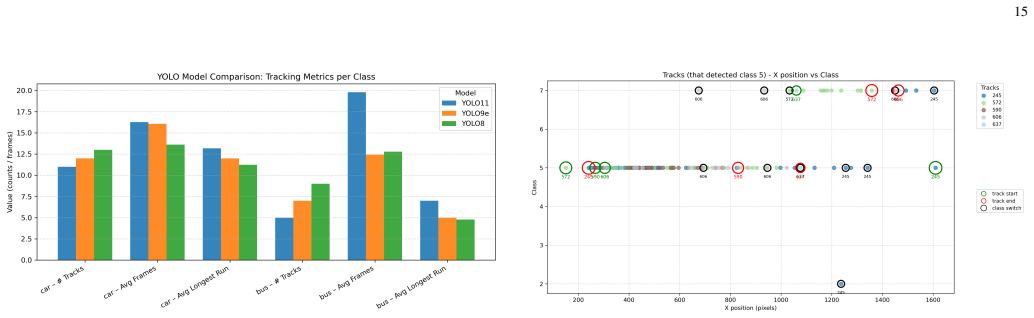
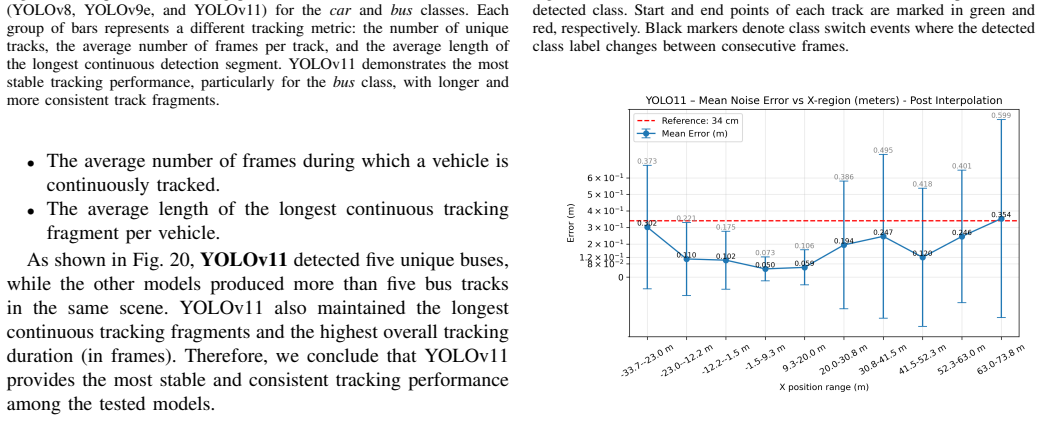
Recognition: unknown
Buried Fiber-Optic Geolocalization with Distributed Acoustic Sensing
Pith reviewed 2026-05-10 15:26 UTC · model grok-4.3
The pith
Buried fiber-optic cables can be geolocalized to sub-meter accuracy using distributed acoustic sensing and vehicle trajectories.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
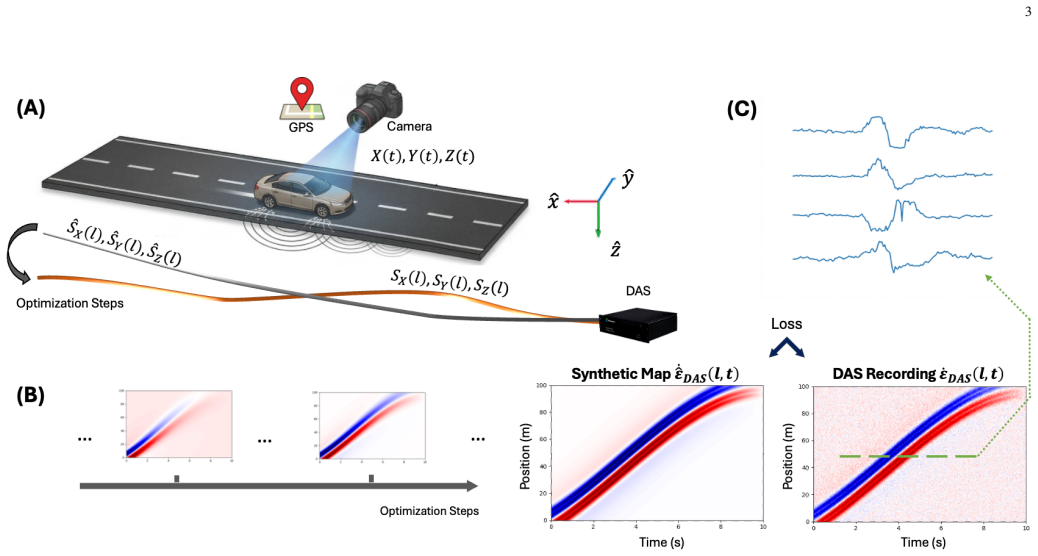
By fusing DAS strain-rate data with vehicle trajectories obtained from video or GPS, the fiber geometry is recovered through optimization that minimizes the difference between observed and physics-simulated strain-rate patterns along the cable, yielding sub-meter accuracy in both simulations and real-world tests that aligns with tap-test calibrations.
What carries the argument
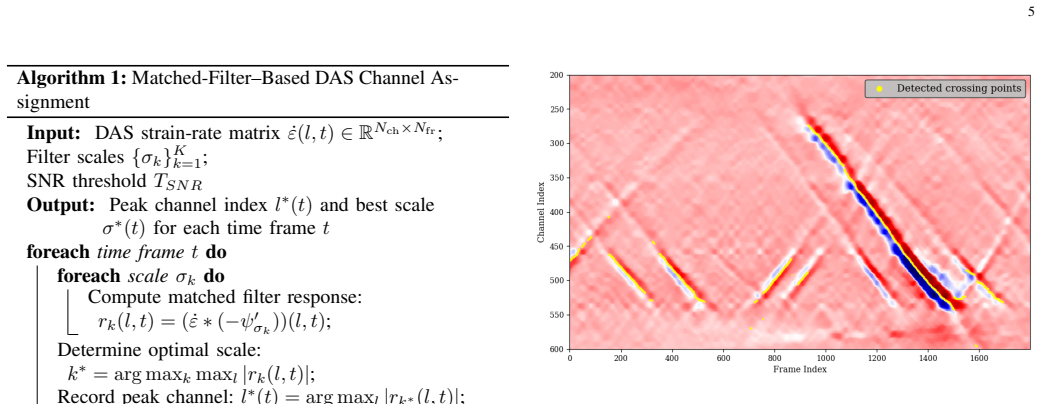
Mismatch minimization between measured DAS strain-rate maps and physics-based synthetic maps generated from vehicle trajectories, initialized by matched filtering and refined via neural-network trajectory optimization.
Load-bearing premise
The approach depends on having one accessible end of the fiber and sufficiently accurate vehicle trajectory information from video tracking or GPS, along with the reliability of generating matching physics-based synthetic strain-rate data.
What would settle it
A direct comparison in a new field site where the fiber position is independently verified by excavation or high-precision surveying, checking if the estimated path deviates by more than one meter from the true location.
Figures














read the original abstract
We present a scalable method for geolocalizing buried fiber-optic cables using Distributed Acoustic Sensing (DAS) and traffic-induced quasi-static seismic signals. Assuming access to one end of the fiber, the method fuses DAS measurements with vehicle trajectories obtained from either video tracking or vehicle-mounted GPS. The fiber geometry is estimated by minimizing the mismatch between the measured and physics-based synthetic strain-rate maps. The framework combines a matched-filter initialization with neural-network-based trajectory optimization, enabling robust convergence under realistic noise and trajectory-uncertainty conditions. Simulation and field experiments demonstrate sub-meter localization accuracy, often on the order of tens of centimeters, and strong agreement with manual calibration by tap-testing. This approach provides a practical tool for mapping poorly documented underground fiber infrastructure and for supporting urban sensing applications.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a scalable method for geolocalizing buried fiber-optic cables using Distributed Acoustic Sensing (DAS) of traffic-induced quasi-static seismic signals. Assuming access to one end of the fiber, it fuses DAS measurements with vehicle trajectories from video tracking or vehicle-mounted GPS. Fiber geometry is recovered by minimizing mismatch between observed and physics-based synthetic strain-rate maps, via matched-filter initialization followed by neural-network trajectory optimization. Simulations and field experiments report sub-meter accuracy (often tens of centimeters) with strong agreement to manual tap-testing calibration.
Significance. If the reported accuracy holds, the work supplies a practical, physics-informed tool for mapping undocumented underground fiber infrastructure and supporting urban DAS applications. Strengths include the explicit use of independent trajectory data and forward modeling rather than purely data-driven fitting, the absence of free parameters in the core estimation, and direct validation against tap-testing. These elements make the approach reproducible and extensible beyond the specific experiments shown.
minor comments (4)
- The abstract and introduction would benefit from a concise statement of the precise mismatch metric (e.g., L2 norm on strain-rate time series) used in the optimization objective.
- Figure captions for the synthetic strain-rate maps should explicitly note the vehicle speed range, sampling rate, and noise model employed, to allow readers to assess sensitivity.
- A short paragraph on failure modes (e.g., when trajectory uncertainty exceeds the reported levels or when multiple vehicles are present) would strengthen the discussion of practical applicability.
- The neural-network architecture details (layer count, activation functions, and regularization) are referenced but not tabulated; adding these in an appendix would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the positive and accurate summary of our work, the recognition of its strengths in using physics-based forward modeling with independent trajectory data, and the recommendation for minor revision. We are pleased that the sub-meter accuracy, reproducibility, and potential for urban DAS applications were highlighted.
Circularity Check
No significant circularity in derivation chain
full rationale
The paper's core method estimates buried fiber geometry via optimization that minimizes mismatch between observed DAS strain-rate signals and independent physics-based synthetic strain-rate maps generated from external vehicle trajectory data (video tracking or GPS). This forward-modeling step uses separate inputs and is validated against manual tap-testing calibration, without any self-definitional reduction, fitted parameters renamed as predictions, or load-bearing self-citations that collapse the result to the paper's own definitions. The derivation remains self-contained against external benchmarks and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Physics-based synthetic strain-rate maps generated from vehicle trajectories accurately represent the measured DAS signals under realistic noise conditions.
Reference graph
Works this paper leans on
-
[1]
Standard guideline for the collection and depiction of existing subsurface utility data (ci/asce 38- 02),
American Society of Civil Engineers, “Standard guideline for the collection and depiction of existing subsurface utility data (ci/asce 38- 02),” American Society of Civil Engineers, Technical Report, 2002
2002
-
[2]
Distributed acoustic sensing turns fiber-optic cables into sensitive seismic antennas,
Z. Zhan, “Distributed acoustic sensing turns fiber-optic cables into sensitive seismic antennas,”Seismological Research Letters, vol. 91, no. 1, pp. 1–15, dec 2019
2019
-
[3]
Optical fiber sensors: Working principle, applications, and limitations,
M. Elsherif, A. E. Salih, M. G. Mu ˜noz, F. Alam, B. AlQattan, D. S. Antonysamy, M. F. Zaki, A. K. Yetisen, S. Park, T. D. Wilkinson, and H. Butt, “Optical fiber sensors: Working principle, applications, and limitations,”Advanced Photonics Research, vol. 3, no. 11, p. 2100371, 2022
2022
-
[4]
Optical fiber sensors and sensing networks: overview of the main principles and applications,
C. Pend ˜ao and I. Silva, “Optical fiber sensors and sensing networks: overview of the main principles and applications,”Sensors, vol. 22, no. 19, p. 7554, 2022
2022
-
[5]
Distributed acoustic sensing for monitoring linear infrastructures: Current status and trends,
H.-H. Zhu, W. Liu, T. Wang, J.-W. Su, and B. Shi, “Distributed acoustic sensing for monitoring linear infrastructures: Current status and trends,” Sensors, vol. 22, no. 19, p. 7550, 2022
2022
-
[6]
DAS vehicle signal extraction using machine learning in urban traffic monitoring,
R. Min, Y . Chen, H. Wang, and Y . Chen, “DAS vehicle signal extraction using machine learning in urban traffic monitoring,”IEEE Transactions on Geoscience and Remote Sensing, vol. 62, pp. 1–10, 2024
2024
-
[7]
Urban DAS data processing and its preliminary application to city traffic monitoring,
H. Wang, Y . Chen, R. Min, and Y . Chen, “Urban DAS data processing and its preliminary application to city traffic monitoring,”Sensors, vol. 22, no. 24, p. 9976, 2022
2022
-
[8]
Urban traffic monitoring using distributed acoustic sensing (DAS),
L. Arthur, X. Chen, H. Cai, and H. Tian, “Urban traffic monitoring using distributed acoustic sensing (DAS),” inAGU Fall Meeting Abstracts, vol. 2024, 2024, pp. S23A–3504
2024
-
[9]
TelecomTM: A fine-grained and ubiquitous traffic monitoring system using pre-existing telecommunication fiber-optic cables as sensors,
J. Liu, S. Yuan, Y . Dong, B. Biondi, and H. Y . Noh, “TelecomTM: A fine-grained and ubiquitous traffic monitoring system using pre-existing telecommunication fiber-optic cables as sensors,”Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies, vol. 7, no. 2, pp. 1–24, 2023
2023
-
[10]
A fiber-optic traffic monitoring network trained with video inputs,
K. Cohen, L. Hen, and A. Lellouch, “A fiber-optic traffic monitoring network trained with video inputs,”Scientific Reports, vol. 15, p. 28954, 2025
2025
-
[11]
Continuous subsurface monitoring by passive seismic with distributed acoustic sensors-the “stanford array
E. R. Martin, B. L. Biondi, M. Karrenbach, and S. Cole, “Continuous subsurface monitoring by passive seismic with distributed acoustic sensors-the “stanford array” experiment,” inFirst EAGE Workshop on Practical Reservoir Monitoring. European Association of Geoscientists & Engineers, 2017, pp. cp–505
2017
-
[12]
Vessel detection and localiza- tion using distributed acoustic sensing in submarine optical fiber cables,
E. E. Ramirez-Torres, J. Macias-Guarasa, D. Pizarro-Perez, J. Teje- dor, S. E. Palazuelos-Cagigas, P. J. Vidal-Moreno, S. Martin-Lopez, M. Gonzalez-Herraez, and R. Vanthillo, “Vessel detection and localiza- tion using distributed acoustic sensing in submarine optical fiber cables,” 2025
2025
-
[13]
Traffic flow and speed monitoring based on optical fiber distributed acoustic sensor,
L. Wang, S. Wang, P. Wang, W. Wang, D. Wang, Y . Wang, and S. Wang, “Traffic flow and speed monitoring based on optical fiber distributed acoustic sensor,” 2025
2025
-
[14]
Intelligent traffic monitoring with distributed acoustic sensing,
D. Xie, X. Wu, Z. Guo, H. Hong, B. Wang, and Y . Rong, “Intelligent traffic monitoring with distributed acoustic sensing,” 2024
2024
-
[15]
Highway vehicle detection based on distributed acoustic sensing,
X.-W. Kou, Q.-G. Du, L.-T. Huang, H.-H. Wang, and Z.-Y . Li, “Highway vehicle detection based on distributed acoustic sensing,”Optics Express, vol. 32, no. 16, pp. 27 068–27 080, jul 2024
2024
-
[16]
Recent progress in distributed fiber acoustic sensing withΦ-OTDR,
Z. Wang, B. Lu, Q. Ye, and H. Cai, “Recent progress in distributed fiber acoustic sensing withΦ-OTDR,”Sensors, vol. 20, no. 22, p. 6594, 2020
2020
-
[17]
Applications and limitations of distributed acoustic sensing in shallow seismic surveys and monitoring,
Y . Abukrat, P. Sinitsyn, M. Reshef, and A. Lellouch, “Applications and limitations of distributed acoustic sensing in shallow seismic surveys and monitoring,”GEOPHYSICS, vol. 88, pp. 1–51, may 2023
2023
-
[18]
New methods for non-destructive underground fiber localization using distributed fiber optic sensing technology,
H. Liu, M.-F. Huang, Y . Chen, X. Fan, T. Wang, and M. Gruteser, “New methods for non-destructive underground fiber localization using distributed fiber optic sensing technology,” in2020 Opto-Electronics and Communications Conference (OECC). IEEE, 2020, pp. 1–3
2020
-
[19]
Traffic flow and vehicle speed monitoring with the object detection method from the roadside distributed acoustic sensing array,
Z. Ye, W. Wang, X. Wang, F. Yang, F. Peng, K. Yan, H. Kou, and A. Yuan, “Traffic flow and vehicle speed monitoring with the object detection method from the roadside distributed acoustic sensing array,” Frontiers in Earth Science, vol. 10, 2023
2023
-
[20]
Ambient noise-based weakly supervised manhole localization methods over deployed fiber networks,
A. Bukharin, S. Han, Y . Chen, M.-F. Huang, Y .-K. Huang, Y . Xie, and T. Wang, “Ambient noise-based weakly supervised manhole localization methods over deployed fiber networks,”Optics Express, vol. 31, no. 6, pp. 9591–9607, 2023
2023
-
[21]
Fiber-optic network observations of earthquake wavefields,
N. J. Lindsey, H. Rademacher, and J. B. Ajo-Franklin, “Fiber-optic network observations of earthquake wavefields,”Geophysical Research Letters, vol. 44, no. 23, pp. 11 792–11 799, 2017
2017
-
[22]
Distributed acoustic sensing using dark fiber for near-surface charac- terization and broadband seismic event detection,
J. B. Ajo-Franklin, S. Dou, N. J. Lindsey, I. Monga, C. Tracy, M. Robert- son, V . Rodriguez Tribaldos, C. Ulrich, B. Freifeld, and T. M. Daley, “Distributed acoustic sensing using dark fiber for near-surface charac- terization and broadband seismic event detection,”Scientific Reports, vol. 9, no. 1, p. 1328, 2019
2019
-
[23]
ZSN2N-DAS: Zero-shot Noise2Noise denoising for distributed acoustic sensing data,
D. Feng, Z. Wang, and J. Gao, “ZSN2N-DAS: Zero-shot Noise2Noise denoising for distributed acoustic sensing data,”IEEE Transactions on Geoscience and Remote Sensing, vol. 63, pp. 1–15, 2025
2025
-
[24]
Distributed acoustic sensing vertical seismic profile data denoiser based on convolutional neural network,
Y . Zhao, Y . Li, and N. Wu, “Distributed acoustic sensing vertical seismic profile data denoiser based on convolutional neural network,”IEEE Transactions on Geoscience and Remote Sensing, vol. 60, pp. 1–12, 2022
2022
-
[25]
A. H. Hartog,An Introduction to Distributed Optical Fibre Sensors. CRC Press, 2017
2017
-
[26]
Robust retrieval of surface waves from vehicle signals for near-surface imaging,
X. Ding, H. Zhu, J. Zhang, and J. Zhang, “Robust retrieval of surface waves from vehicle signals for near-surface imaging,”IEEE Transactions on Geoscience and Remote Sensing, vol. 63, pp. 1–14, 2025
2025
-
[27]
Deep learning for seismic data compression in distributed acoustic sensing,
Y . Chen, O. M. Saad, Y . Chen, and A. Savvaidis, “Deep learning for seismic data compression in distributed acoustic sensing,”IEEE Transactions on Geoscience and Remote Sensing, vol. 63, pp. 1–13, 2025
2025
-
[28]
Szeliski,Computer vision: algorithms and applications
R. Szeliski,Computer vision: algorithms and applications. Springer Nature, 2022
2022
-
[29]
Deep deconvolution for traffic analysis with distributed acoustic sensing data,
M. van den Ende, A. Ferrari, A. Sladen, and C. Richard, “Deep deconvolution for traffic analysis with distributed acoustic sensing data,” IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 3, pp. 2947–2962, 2023
2023
-
[30]
Spatial deep deconvolution U-Net for traffic analyses with distributed acoustic sensing,
S. Yuan, M. van den Ende, J. Liu, H. Y . Noh, R. Clapp, C. Richard, and B. Biondi, “Spatial deep deconvolution U-Net for traffic analyses with distributed acoustic sensing,”IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 2, pp. 1913–1924, 2024
1913
-
[31]
Near-surface characterization using a roadside distributed acoustic sensing array,
S. Yuan, A. Lellouch, R. G. Clapp, and B. Biondi, “Near-surface characterization using a roadside distributed acoustic sensing array,”The Leading Edge, vol. 39, no. 9, pp. 646–653, 2020
2020
-
[32]
Forward modeling of seismic wavefield induced by the high-speed trains in 3-d space,
X. Wang, X. Pan, J. Luo, W. Chen, and B. Wang, “Forward modeling of seismic wavefield induced by the high-speed trains in 3-d space,”IEEE Transactions on Geoscience and Remote Sensing, vol. 62, pp. 1–11, 2024. 11
2024
-
[33]
Signal enhancement in distributed acoustic sensing data using a guided unsupervised deep learning network,
O. M. Saad, M. Ravasi, and T. Alkhalifah, “Signal enhancement in distributed acoustic sensing data using a guided unsupervised deep learning network,” 2024
2024
-
[34]
Zero-shot denoising for DAS- VSP data based on conditional diffusion probabilistic models,
D. Liu, Z. Wang, X. Wang, and W. Chen, “Zero-shot denoising for DAS- VSP data based on conditional diffusion probabilistic models,”IEEE Transactions on Geoscience and Remote Sensing, vol. 63, pp. 1–11, 2025
2025
-
[35]
DAS up- and downgoing wavefield separation via radon transform combined with parallel U-Network,
D. Sun, G. Yao, and Y . Li, “DAS up- and downgoing wavefield separation via radon transform combined with parallel U-Network,” IEEE Transactions on Geoscience and Remote Sensing, vol. 63, pp. 1–10, 2025
2025
-
[36]
H. L. Van Trees,Detection, Estimation, and Modulation Theory, Part I. New York: Wiley, 1968
1968
-
[37]
J. G. Proakis and M. Salehi,Digital Communications, 5th ed. New York: McGraw-Hill, 2007
2007
-
[38]
Paper dataset,
K. Cohen, L. Hen, and A. Lellouch, “Paper dataset,” 2024
2024
-
[39]
You only look once: Unified, real-time object detection,
J. Redmon, S. Divvala, R. Girshick, and A. Farhadi, “You only look once: Unified, real-time object detection,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016
2016
-
[40]
Ultralytics YOLO11,
G. Jocher, A. Chaurasia, and J. Qiu, “Ultralytics YOLO11,” 2024
2024
-
[41]
P. J. Huber,Robust Statistics, ser. Wiley Series in Probability and Mathematical Statistics. New York: John Wiley & Sons, 1981
1981
-
[42]
Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography,
M. A. Fischler and R. C. Bolles, “Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography,”Communications of the ACM, vol. 24, no. 6, pp. 381–395, 1981
1981
-
[43]
A limited memory algo- rithm for bound constrained optimization,
R. H. Byrd, P. Lu, J. Nocedal, and C. Zhu, “A limited memory algo- rithm for bound constrained optimization,”SIAM Journal on Scientific Computing, vol. 16, no. 5, pp. 1190–1208, 1995. VII. FIBERSYSTEM OFCOORDINATES In order to analyze seismic-induced deformation from the fiber’s point of view, we define a local orthonormal frame {ˆex(l),ˆey(l),ˆez(l)}at e...
1995
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.