Recognition: unknown
From Prompt to Physical Actuation: Holistic Threat Modeling of LLM-Enabled Robotic Systems
Pith reviewed 2026-05-07 09:39 UTC · model grok-4.3
The pith
LLM-enabled robots let cyber threats, adversarial inputs, and conversational prompts converge at the same six trust boundaries and propagate to unsafe physical actuation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
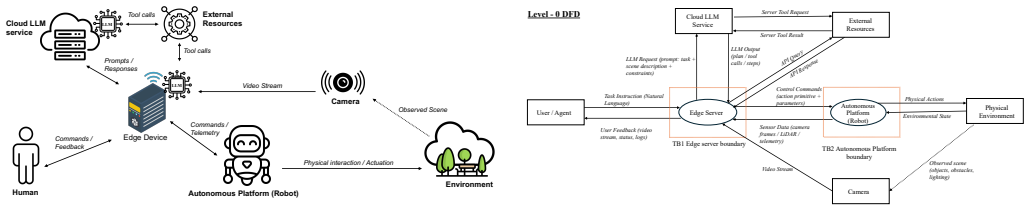
By modeling an LLM-enabled autonomous robot as a hierarchical Data Flow Diagram and applying STRIDE-per-interaction analysis across six boundary-crossing interaction points with a three-category taxonomy of Conventional Cyber Threats, Adversarial Threats, and Conversational Threats, the analysis shows that the categories converge at the same boundaries. It traces three cross-boundary attack chains from external entry points to unsafe physical actuation, each exposing a distinct architectural property: the absence of independent semantic validation between user input and actuator dispatch, cross-modal translation from visual perception to language-model instruction, and unmediated boundary 1.
What carries the argument
Hierarchical Data Flow Diagram with STRIDE-per-interaction analysis performed at six boundary-crossing points under a three-category threat taxonomy.
If this is right
- Absence of independent semantic validation lets user inputs reach actuator dispatch without checks.
- Cross-modal translation from vision to language instructions allows visual adversarial attacks to alter planning outputs.
- Unmediated provider-side tool use creates direct paths for external threats to affect physical actions.
- The convergence of all three threat categories at the same boundaries means defenses must address multiple categories simultaneously.
- The full perception-planning-actuation pipeline contains previously unexamined propagation routes that end in unsafe actuation.
Where Pith is reading between the lines
- Robot designers could add lightweight semantic validators at the identified boundaries to interrupt the chains.
- The same data-flow approach could be applied to LLM-controlled drones or vehicles to locate analogous boundary risks.
- Physical tests that attempt to execute the three chains on hardware would reveal whether the diagram matches actual system behavior.
- Security standards for autonomous systems may need to treat conversational and adversarial inputs as equivalent to conventional network threats.
Load-bearing premise
The proposed hierarchical data flow diagram and its six boundary-crossing interaction points sufficiently represent real-world LLM-enabled robotic systems in edge-cloud architectures.
What would settle it
An implemented LLM-enabled robot that inserts an independent semantic validator between every user input and every actuator dispatch command, breaking all three traced attack chains, would show the six-point model does not capture a necessary architectural property.
Figures


read the original abstract
As large language models are integrated into autonomous robotic systems for task planning and control, compromised inputs or unsafe model outputs can propagate through the planning pipeline to physical-world consequences. Although prior work has studied robotic cybersecurity, adversarial perception attacks, and LLM safety independently, no existing study traces how these threat categories interact and propagate across trust boundaries in a unified architectural model. We address this gap by modeling an LLM-enabled autonomous robot in an edge-cloud architecture as a hierarchical Data Flow Diagram and applying STRIDE-per-interaction analysis across six boundary-crossing interaction points using a three-category taxonomy of Conventional Cyber Threats, Adversarial Threats, and Conversational Threats. The analysis reveals that these categories converge at the same boundary crossings, and we trace three cross-boundary attack chains from external entry points to unsafe physical actuation, each exposing a distinct architectural property: the absence of independent semantic validation between user input and actuator dispatch, cross-modal translation from visual perception to language-model instruction, and unmediated boundary crossing through provider-side tool use. To our knowledge, this is the first DFD-based threat analysis integrating all three threat categories across the full perception-planning-actuation pipeline of an LLM-enabled robotic system.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims to fill a gap in threat modeling for LLM-enabled robotic systems by developing a hierarchical Data Flow Diagram for an edge-cloud architecture and performing STRIDE-per-interaction analysis at six boundary crossings using a three-category taxonomy (Conventional Cyber Threats, Adversarial Threats, Conversational Threats). The analysis shows convergence of these threats at boundary crossings and identifies three attack chains that lead to unsafe physical actuation, each linked to a specific architectural weakness: lack of independent semantic validation, cross-modal translation issues, and unmediated provider-side tool use. It positions this as the first such integrated analysis across the perception-planning-actuation pipeline.
Significance. If the modeling holds, this work is significant for unifying previously separate lines of research on robotic cybersecurity, adversarial perception, and LLM safety into a single architectural analysis. The explicit construction of the DFD and the internal tracing of three attack chains by construction from the defined boundaries provide a clear, reproducible framework that highlights concrete architectural properties. This structured approach could inform secure design practices for emerging LLM-robot systems, though its broader impact will depend on how well the model generalizes beyond the chosen edge-cloud setup.
minor comments (3)
- [§2] §2 Related Work: The discussion of prior work on robotic cybersecurity and LLM safety could be expanded with more specific citations to recent studies on LLM-controlled physical systems to better support the novelty claim of being the first integrated DFD analysis.
- [Figure 1] Figure 1 (hierarchical DFD): The diagram would benefit from explicit labels or a legend annotating the six boundary-crossing interaction points to make the subsequent STRIDE-per-interaction analysis easier to follow.
- [§4.3] §4.3 Attack Chains: While the three chains are traced clearly from the model, including a brief step-by-step enumeration or pseudocode for at least one chain would improve the clarity and reproducibility of how the architectural properties are exposed.
Simulated Author's Rebuttal
We thank the referee for the positive summary and significance assessment of our manuscript on unified threat modeling for LLM-enabled robotic systems. The recommendation for minor revision is noted. No specific major comments were enumerated in the report, so we have no point-by-point rebuttals to provide. We will incorporate minor clarifications to the manuscript as appropriate during revision.
Circularity Check
No significant circularity
full rationale
The paper defines a hierarchical DFD for an edge-cloud LLM-robot architecture, applies the established STRIDE-per-interaction method across six boundary crossings, and traces attack chains that follow from the model's explicit properties (absence of semantic validation, cross-modal translation, unmediated tool use). These steps use standard threat-modeling techniques on a self-defined but externally grounded architecture; no equations, fitted parameters, self-definitional loops, or load-bearing self-citations reduce any claimed result to its inputs by construction. The convergence finding and three chains are direct consequences of applying the chosen taxonomy to the chosen diagram, which is the normal, non-circular outcome of a modeling paper.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math STRIDE-per-interaction is an appropriate method for analyzing boundary crossings in the system
- domain assumption The hierarchical Data Flow Diagram accurately represents the edge-cloud LLM-enabled robot architecture
invented entities (1)
-
Three-category taxonomy (Conventional Cyber Threats, Adversarial Threats, Conversational Threats)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
M. Ahn, A. Brohan, N. Brown, Y . Chebotar, O. Cortes, B. David, C. Finn, C. Fu, K. Gopalakrishnan, K. Hausmanet al., “Do as i can, not as i say: Grounding language in robotic affordances,”arXiv preprint arXiv:2204.01691, 2022
work page internal anchor Pith review arXiv 2022
-
[2]
Code as policies: Language model programs for embod- ied control,
J. Liang, W. Huang, F. Xia, P. Xu, K. Hausman, B. Ichter, P. Florence, and A. Zeng, “Code as policies: Language model programs for embod- ied control,” in2023 IEEE International conference on robotics and automation (ICRA). IEEE, 2023, pp. 9493–9500
2023
-
[3]
Chatgpt for robotics: Design principles and model abilities,
S. H. Vemprala, R. Bonatti, A. Bucker, and A. Kapoor, “Chatgpt for robotics: Design principles and model abilities,”Ieee Access, vol. 12, pp. 55 682–55 696, 2024
2024
-
[4]
PaLM-E: An Embodied Multimodal Language Model
D. Driess, F. Xia, M. S. Sajjadi, C. Lynch, A. Chowdhery, B. Ichter, A. Wahid, J. Tompson, Q. Vuong, T. Yuet al., “Palm-e: An embodied multimodal language model,”arXiv preprint arXiv:2303.03378, 2023
work page internal anchor Pith review arXiv 2023
-
[5]
S. Salimpour, L. Fu, K. Rachwał, P. Bertrand, K. O’Sullivan, R. Jakob, F. Keramat, L. Militano, G. Toffetti, H. Edelmanet al., “Towards embodied agentic ai: Review and classification of llm-and vlm-driven robot autonomy and interaction,”arXiv preprint arXiv:2508.05294, 2025
-
[6]
MITRE ATT&CK Enterprise Matrix,
MITRE Corporation, “MITRE ATT&CK Enterprise Matrix,” https:// attack.mitre.org/matrices/enterprise/, 2026, accessed: Apr. 2026
2026
-
[7]
MITRE ATLAS: Adversarial Threat Landscape for AI Systems,
——, “MITRE ATLAS: Adversarial Threat Landscape for AI Systems,” https://atlas.mitre.org/, 2026, accessed: Apr. 2026
2026
-
[8]
OW ASP Top 10 for Large Language Model Applications,
OW ASP Foundation, “OW ASP Top 10 for Large Language Model Applications,” https://genai.owasp.org/llm-top-10/, 2025, version 2025, accessed Apr. 2026
2025
-
[9]
Robotics cyber security: vulnerabilities, attacks, countermeasures, and recommendations,
J.-P. A. Yaacoub, H. N. Noura, O. Salman, and A. Chehab, “Robotics cyber security: vulnerabilities, attacks, countermeasures, and recommendations,”Int. J. Inf. Secur., vol. 21, no. 1, p. 115–158, Feb
-
[10]
International Journal of Information Security21(1), 115–158 (2021)
[Online]. Available: https://doi.org/10.1007/s10207-021-00545-8
-
[11]
Security considerations in ai-robotics: A survey of current methods, challenges, and opportunities,
S. Neupane, S. Mitra, I. A. Fernandez, S. Saha, S. Mittal, J. Chen, N. Pillai, and S. Rahimi, “Security considerations in ai-robotics: A survey of current methods, challenges, and opportunities,”IEEE Access, vol. 12, pp. 22 072–22 097, 2024
2024
-
[12]
Trust in llm-controlled robotics: a survey of security threats, defenses and challenges,
X. Huang, S. K. V . B, T. Chen, M. Bryson, T. Chaffey, H. Chen, K.-K. R. Choo, and I. R. Manchester, “Trust in llm-controlled robotics: a survey of security threats, defenses and challenges,” TechRxiv, vol. 2025, no. 1229, 2025. [Online]. Available: https: //www.techrxiv.org/doi/abs/10.36227/techrxiv.176704885.51786927/v1
-
[13]
Shostack,Threat Modeling: Designing for Security
A. Shostack,Threat Modeling: Designing for Security. John Wiley & Sons, 2014
2014
-
[14]
Cyber threat modeling of an llm-based healthcare system,
N. Nagaraja and H. Bahsi, “Cyber threat modeling of an llm-based healthcare system,” inProceedings of the 11th International Conference on Information Systems Security and Privacy - Volume 1: ICISSP, INSTICC. SciTePress, 2025, pp. 325–336
2025
-
[15]
Typefly: Flying drones with large language model,
G. Chen, X. Yu, N. Ling, and L. Zhong, “Typefly: Flying drones with large language model,” 2024. [Online]. Available: https://arxiv.org/abs/2312.14950
-
[16]
LLM-based reinforce- ment learning for controlling robot swarms,
C. R. da Cunha, G. Giardini, and M. Turqueti, “LLM-based reinforce- ment learning for controlling robot swarms,” inProceedings of the 7th International Conference on Artificial Intelligence, Robotics, and Control (AIRC), Savannah, GA, USA, 2026, to appear
2026
-
[17]
Large language models for robotics: A survey,
F. Zeng, W. Gan, Z. Huai, L. Sun, H. Chen, Y . Wang, N. Liu, and P. S. Yu, “Large language models for robotics: A survey,” 2025. [Online]. Available: https://arxiv.org/abs/2311.07226
-
[18]
Llm-enabled cyber- physical systems: Survey, research opportunities, and challenges,
W. Xu, M. Liu, O. Sokolsky, I. Lee, and F. Kong, “Llm-enabled cyber- physical systems: Survey, research opportunities, and challenges,” in 2024 IEEE International Workshop on Foundation Models for Cyber- Physical Systems & Internet of Things (FMSys), 2024, pp. 50–55
2024
-
[19]
Threat modeling of cyber-physical systems - a case study of a microgrid system,
S. M. Khalil, H. Bahsi, H. O. Dola, T. Kor ˜otko, K. McLaughlin, and V . Kotkas, “Threat modeling of cyber-physical systems - a case study of a microgrid system,”Computers & Security, vol. 124, p. 102950, 2023. [Online]. Available: https://www.sciencedirect.com/ science/article/pii/S016740482200342X
2023
-
[20]
Jailbreaking llm-controlled robots,
A. Robey, Z. Ravichandran, V . Kumar, H. Hassani, and G. J. Pappas, “Jailbreaking llm-controlled robots,” 2024. [Online]. Available: https://arxiv.org/abs/2410.13691
-
[21]
Badrobot: Jailbreaking embodied llms in the physical world,
H. Zhang, C. Zhu, X. Wang, Z. Zhou, C. Yin, M. Li, L. Xue, Y . Wang, S. Hu, A. Liu, P. Guo, and L. Y . Zhang, “Badrobot: Jailbreaking embodied llms in the physical world,” 2025. [Online]. Available: https://arxiv.org/abs/2407.20242
-
[22]
A study on prompt injection attack against llm-integrated mobile robotic systems,
W. Zhang, X. Kong, C. Dewitt, T. Braunl, and J. B. Hong, “A study on prompt injection attack against llm-integrated mobile robotic systems,”
-
[23]
Available: https://arxiv.org/abs/2408.03515
[Online]. Available: https://arxiv.org/abs/2408.03515
-
[24]
A practical man-in-the-middle attack on deep learning edge device by sparse light strip injection into camera data lane,
W. Liu, W. He, B. Hu, and C.-H. Chang, “A practical man-in-the-middle attack on deep learning edge device by sparse light strip injection into camera data lane,” in2022 IEEE 35th International System-on-Chip Conference (SOCC), 2022, pp. 1–6
2022
-
[25]
Abusing images and sounds for indirect instruction injection in multi-modal llms,
E. Bagdasaryan, T.-Y . Hsieh, B. Nassi, and V . Shmatikov, “Abusing images and sounds for indirect instruction injection in multi-modal llms,” 2023. [Online]. Available: https://arxiv.org/abs/2307.10490
-
[26]
Image-based prompt injection: Hijacking multimodal llms through visually embed- ded adversarial instructions,
N. Nagaraja, L. Zhang, Z. Wang, B. Zhang, and P. Patil, “Image-based prompt injection: Hijacking multimodal llms through visually embed- ded adversarial instructions,” in2025 3rd International Conference on Foundation and Large Language Models (FLLM). IEEE, 2025, pp. 916–922
2025
-
[27]
CVE-2016-3714: Im- ageMagick insufficient filtering vulnerability,
National Institute of Standards and Technology, “CVE-2016-3714: Im- ageMagick insufficient filtering vulnerability,” https://nvd.nist.gov/vuln/ detail/CVE-2016-3714, 2016, national Vulnerability Database, accessed Apr. 2026
2016
-
[28]
K. Greshake, S. Abdelnabi, S. Mishra, C. Endres, T. Holz, and M. Fritz, “Not what you’ve signed up for: Compromising real-world llm-integrated applications with indirect prompt injection,” 2023. [Online]. Available: https://arxiv.org/abs/2302.12173 TABLE II: Selective Threat Elicitation for Selected Interactions. Classes: CCT, ConT, AdvT; DFD: E, DF, P, D...
work page internal anchor Pith review arXiv 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.