Recognition: 2 theorem links
· Lean TheoremLISA: Cognitive Arbitration for Signal-Free Autonomous Intersection Management
Pith reviewed 2026-05-13 04:30 UTC · model grok-4.3
The pith
An LLM can manage autonomous intersections without traffic signals by arbitrating vehicle intents and priorities.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
LISA demonstrates that LLM-based reasoning over declared vehicle intents, incorporating priority classes, queue pressure, and energy preferences, can enable real-time signal-free intersection management, reducing mean control delay by up to 89.1% while maintaining Level of Service C, cutting mean waiting time by 93% and peak queue length by 60.6% under near-saturated demand relative to fixed-cycle control, lowering fuel consumption by up to 48.8%, and reaching 86.2% intent satisfaction compared to 61.2% for the best non-LLM method.
What carries the argument
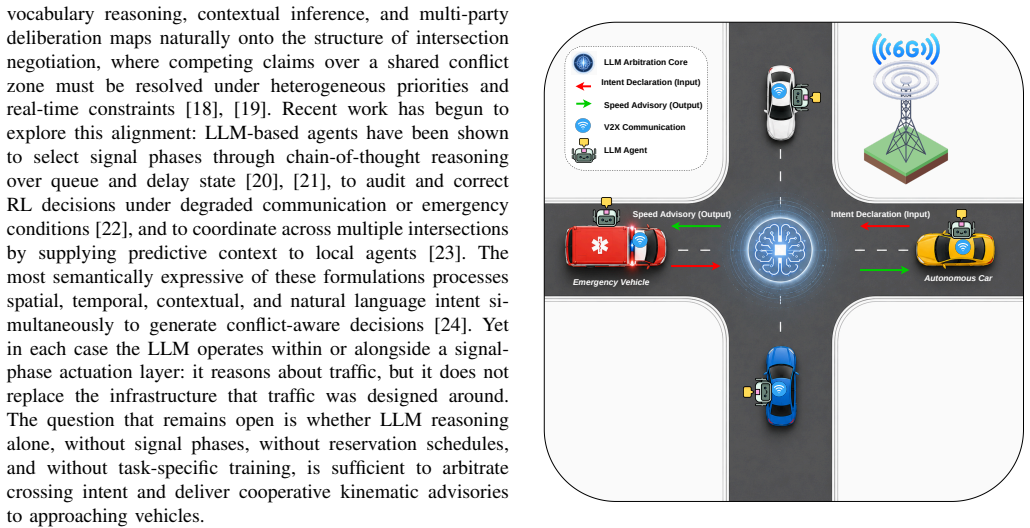
The cognitive arbitration performed by the LLM in LISA, which interprets multi-agent intents and constraints to produce speed advisories for signal-free passage.
If this is right
- Mean control delay is reduced by up to 89.1% compared to non-LLM baselines.
- Level of Service C is maintained as traffic load increases, while baselines drop to Level F.
- Under near-saturated demand, mean waiting time decreases by 93% and peak queue length by 60.6% versus fixed-cycle control.
- Fuel consumption is lowered by up to 48.8%.
- Intent satisfaction improves to 86.2% from 61.2% achieved by the best traditional approach.
Where Pith is reading between the lines
- LLM-driven arbitration may generalize to other scenarios requiring multi-vehicle coordination such as lane changes or platoon formation.
- Faster inference techniques would make this method viable for even more time-critical traffic decisions.
- The success depends on vehicles accurately declaring their intents, suggesting a need for standardized communication protocols.
Load-bearing premise
Current large language models can provide responses with low enough latency to support real-time sub-second speed advisory decisions for vehicles.
What would settle it
Measurement of LLM inference latency in a simulated dense traffic scenario showing consistent delays beyond the sub-second window required for safe speed changes.
Figures





read the original abstract
Large language models (LLMs) show strong potential for Intelligent Transportation Systems (ITS), particularly in tasks requiring situational reasoning and multi-agent coordination. These capabilities make them well suited for cooperative driving, where rule-based approaches struggle in complex and dynamic traffic environments. Intersection management remains especially challenging due to conflicting right-of-way demands, heterogeneous vehicle priorities, and vehicle-specific kinematic constraints that must be resolved in real time. However, existing approaches typically use LLMs as auxiliary components on top of signal-based systems rather than as primary decision-makers. Signal controllers remain vehicle-agnostic, reservation-based methods lack intent awareness, and recent LLM-based systems still depend on signal infrastructure. In addition, LLM inference latency limits their use in sub-second control settings. We propose LISA (LLM-Based Intent-Driven Speed Advisory), a signal-free cognitive arbitration framework for autonomous intersection management. LISA uses an LLM to reason over declared vehicle intents, incorporating priority classes, queue pressure, and energy preferences. We evaluate LISA against fixed-cycle control, SCATS, AIM, and GLOSA across varying traffic loads. Results show that LISA reduces mean control delay by up to 89.1% and maintains Level of Service C while all non-LLM baselines degrade to Level of Service F. Under near-saturated demand, LISA reduces mean waiting time by 93% and peak queue length by 60.6% relative to fixed-cycle control. It also lowers fuel consumption by up to 48.8% and achieves 86.2% intent satisfaction, compared to 61.2% for the best non-LLM method. These results demonstrate that LLM-based reasoning can enable real-time, signal-free intersection management.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes LISA, an LLM-based cognitive arbitration framework for signal-free autonomous intersection management that uses declared vehicle intents, priorities, queue pressure, and energy preferences to issue speed advisories. It evaluates LISA in simulation against fixed-cycle control, SCATS, AIM, and GLOSA, claiming up to 89.1% reduction in mean control delay (maintaining LOS C while baselines reach LOS F), 93% lower mean waiting time, 60.6% shorter peak queues, 48.8% lower fuel use, and 86.2% intent satisfaction under varying loads including near-saturated conditions.
Significance. If the performance claims are substantiated with verifiable real-time feasibility, the work would represent a notable advance in applying LLMs directly to multi-agent coordination in ITS, moving beyond auxiliary roles to primary signal-free arbitration and highlighting potential for intent-aware, infrastructure-light intersection control.
major comments (2)
- The abstract explicitly states that LLM inference latency currently limits sub-second control, yet the reported results (89.1% delay reduction, LOS C maintenance, 93% waiting-time reduction) treat LISA decisions as timely without any measured inference times, timing model for LLM calls, or sensitivity analysis under realistic delays. This assumption is load-bearing for the central claim of real-time, deployable performance and for the comparisons to non-LLM baselines.
- The evaluation description provides no details on the simulation environment (e.g., traffic generation model, vehicle kinematics, exact baseline implementations, demand profiles, or number of runs), statistical tests for the large deltas, or raw data, leaving the headline metrics (LOS C vs. F, 86.2% intent satisfaction) unverifiable from the given text.
minor comments (2)
- The abstract refers to 'sub-series control settings' (likely a typo for 'sub-second').
- Clarify how intent satisfaction is quantified and why 61.2% is reported as the best non-LLM result.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback, which has helped us identify important clarifications needed regarding the simulation assumptions and reproducibility. We address each major comment below and have revised the manuscript to strengthen the presentation of our results and limitations.
read point-by-point responses
-
Referee: The abstract explicitly states that LLM inference latency currently limits sub-second control, yet the reported results (89.1% delay reduction, LOS C maintenance, 93% waiting-time reduction) treat LISA decisions as timely without any measured inference times, timing model for LLM calls, or sensitivity analysis under realistic delays. This assumption is load-bearing for the central claim of real-time, deployable performance and for the comparisons to non-LLM baselines.
Authors: We agree that the manuscript notes the general latency limitation of LLMs but does not quantify inference times or perform sensitivity analysis for the specific LISA setup, which leaves the real-time claims partially unsubstantiated. The reported metrics were generated in simulation under the assumption of instantaneous decisions to isolate the quality of the intent-driven arbitration logic from computational delays. This is a fair critique of the load-bearing assumption. In the revised manuscript we have added an explicit discussion in Section 5.4 clarifying this modeling choice, noting that the headline gains represent an upper bound achievable only with sufficiently fast inference, and outlining pathways (e.g., model distillation, edge deployment) to reach sub-second operation. No new empirical latency measurements or sensitivity runs were performed for this revision, but the text now qualifies the results accordingly. revision: partial
-
Referee: The evaluation description provides no details on the simulation environment (e.g., traffic generation model, vehicle kinematics, exact baseline implementations, demand profiles, or number of runs), statistical tests for the large deltas, or raw data, leaving the headline metrics (LOS C vs. F, 86.2% intent satisfaction) unverifiable from the given text.
Authors: We acknowledge that the original evaluation section lacked sufficient implementation detail for full reproducibility. Although the manuscript referenced the SUMO simulator and high-level scenario parameters, it did not enumerate the traffic model, vehicle dynamics, baseline code adaptations, exact demand schedules, run counts, or statistical procedures. In the revised version we have expanded Section 4 with these specifics: Poisson arrivals for traffic generation, IDM car-following model with documented parameters, precise adaptations of the fixed-cycle, SCATS, AIM, and GLOSA baselines, demand profiles ranging from 150–850 veh/h per approach, 15 independent runs per load level using distinct random seeds, and paired t-tests confirming significance (p < 0.01) for the reported differences. We have also added a data-availability statement committing to release of simulation scripts and aggregated results upon acceptance, enabling verification of the LOS and intent-satisfaction figures. revision: yes
Circularity Check
No circularity: empirical evaluation against independent external baselines
full rationale
The paper's core contribution is an empirical simulation study comparing LISA to fixed-cycle control, SCATS, AIM, and GLOSA under varying loads. No equations, fitted parameters, or derivation steps are presented that reduce results to self-referential inputs. Performance metrics (delay reduction, LOS, waiting time, queue length, fuel, intent satisfaction) are obtained via direct comparison to non-LLM baselines whose definitions and implementations are external to LISA. The abstract acknowledges LLM latency limits but does not embed any self-definitional, fitted-prediction, or self-citation load-bearing structure in the reported outcomes. The evaluation chain therefore remains independent of the method's own outputs.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Autonomous vehicles can reliably and accurately declare their intents, priority classes, queue pressure, and energy preferences to the arbitration system.
- domain assumption LLM inference latency can be reduced or tolerated sufficiently to enable sub-second control decisions.
invented entities (1)
-
LISA cognitive arbitration framework
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
LISA uses an LLM to arbitrate declared vehicle intents by reasoning over priority classes, queue pressure, and energy preferences... Memoized Arbitration Table (MAT)... deterministic kinematic executor
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Results show that LISA reduces mean control delay by up to 89.1%... intent satisfaction of 86.2%
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Computational intelligence in urban traffic signal control: A survey,
D. Zhao, Y . Dai, and Z. Zhang, “Computational intelligence in urban traffic signal control: A survey,”Trans. Sys. Man Cyber Part C, vol. 42, no. 4, pp. 485–494, Jul. 2012. [Online]. Available: https://doi.org/10.1109/TSMCC.2011.2161577
-
[2]
Parallel transportation systems: Toward iot-enabled smart urban traffic control and management,
F. Zhu, Y . Lv, Y . Chen, X. Wang, G. Xiong, and F.-Y . Wang, “Parallel transportation systems: Toward iot-enabled smart urban traffic control and management,”IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 10, pp. 4063–4071, Oct 2020
work page 2020
-
[3]
A survey of autonomous vehicles: Enabling communication technologies and challenges,
M. N. Ahangar, Q. Z. Ahmed, F. A. Khan, and M. Hafeez, “A survey of autonomous vehicles: Enabling communication technologies and challenges,”Sensors, vol. 21, no. 3, 2021. [Online]. Available: https://www.mdpi.com/1424-8220/21/3/706
work page 2021
-
[4]
Cooperative intersection management: A sur- vey,
L. Chen and C. Englund, “Cooperative intersection management: A sur- vey,”IEEE Transactions on Intelligent Transportation Systems, vol. 17, no. 2, pp. 570–586, Feb 2016
work page 2016
-
[5]
E. Namazi, J. Li, and C. Lu, “Intelligent intersection management sys- tems considering autonomous vehicles: A systematic literature review,” IEEE Access, vol. 7, pp. 91 946–91 965, 2019
work page 2019
-
[6]
M. Albdairi and A. Almusawi, “Queue-responsive adaptive signal con- trol vs. Webster optimization: A multi-criteria simulation assessment at a signalized intersection,”Future Transportation, vol. 6, no. 2, p. 92, 2026
work page 2026
-
[7]
Green-pressure – a weighted queue-length approach towards sustainable intersection man- agement,
K. Riehl, A. Kouvelas, and M. A. Makridis, “Green-pressure – a weighted queue-length approach towards sustainable intersection man- agement,” in2025 IEEE 64th Conference on Decision and Control (CDC), Dec 2025, pp. 4964–4969
work page 2025
-
[8]
The traffic signal control problem for inter- sections: a review,
M. Eom and B.-I. Kim, “The traffic signal control problem for inter- sections: a review,”European transport research review, vol. 12, no. 1, p. 50, 2020
work page 2020
-
[9]
State-of-art review of traffic signal control methods: challenges and opportunities,
S. S. S. M. Qadri, M. A. G ¨okc ¸e, and E. ¨Oner, “State-of-art review of traffic signal control methods: challenges and opportunities,”European transport research review, vol. 12, no. 1, p. 55, 2020
work page 2020
-
[10]
Green light optimized speed advisory systems: Impact of signal phasing information accuracy,
A. Stevanovic, J. Stevanovic, and C. Kergaye, “Green light optimized speed advisory systems: Impact of signal phasing information accuracy,” Transportation research record, vol. 2390, no. 1, pp. 53–59, 2013
work page 2013
-
[11]
Potentials and limitations of green light optimal speed advisory systems,
D. Eckhoff, B. Halmos, and R. German, “Potentials and limitations of green light optimal speed advisory systems,” in2013 IEEE Vehicular Networking Conference. IEEE, 2013, pp. 103–110
work page 2013
-
[12]
K. Bhattacharyya, P.-A. Laharotte, A. Burianne, and N.-E. E. Faouzi, “Assessing connected vehicle’s response to green light optimal speed advisory from field operational test and scaling up,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 6, pp. 6725–6736, June 2023
work page 2023
-
[13]
A multiagent approach to autonomous intersection management,
K. Dresner and P. Stone, “A multiagent approach to autonomous intersection management,”Journal of Artificial Intelligence Research, vol. 31, pp. 591–656, 2008
work page 2008
-
[14]
A survey on intersection management of connected autonomous vehicles,
M. Khayatian, M. Mehrabian, E. Andert, R. Dedinsky, S. Choudhary, Y . Lou, and A. Shirvastava, “A survey on intersection management of connected autonomous vehicles,”ACM Transactions on Cyber-Physical Systems, vol. 4, no. 4, pp. 1–27, 2020
work page 2020
-
[15]
A. Gholamhosseinian and J. Seitz, “A comprehensive survey on coop- erative intersection management for heterogeneous connected vehicles,” IEEE Access, vol. 10, pp. 7937–7972, 2022
work page 2022
-
[16]
Y . Wu, H. Chen, and F. Zhu, “Dcl-aim: Decentralized coordination learning of autonomous intersection management for connected and automated vehicles,”Transportation Research Part C: Emerging Tech- nologies, vol. 103, pp. 246–260, 2019
work page 2019
-
[17]
M. A. Ferrag, A. Lakas, N. Tihanyi, and M. Debbah, “Llm and ai agents for autonomous systems: A survey of applications, datasets, and security challenges,”IEEE Open Journal of Intelligent Transportation Systems, vol. 7, pp. 615–657, 2026
work page 2026
-
[18]
Large (vision) language models for autonomous vehicles: Current trends and future directions,
H. Tian, K. Reddy, Y . Feng, M. Quddus, Y . Demiris, and P. An- geloudis, “Large (vision) language models for autonomous vehicles: Current trends and future directions,”IEEE Transactions on Intelligent Transportation Systems, vol. 27, no. 1, pp. 187–210, Jan 2026
work page 2026
-
[19]
Y . Jing, X. Zhang, M. Zhou, Y . Ji, Y . Ding, J. Yin, R. Jia, Y . Xiong, K. Zhao, J. Yang, J. Li, and H. Liu, “Multimodal large language models for perception in autonomous driving: Architecture, taxonomy, and challenges,”IEEE Internet of Things Journal, vol. 13, no. 10, pp. 20 375–20 397, May 2026
work page 2026
-
[20]
M. Movahedi and J. Choi, “The crossroads of LLM and traffic control: A study on large language models in adaptive traffic signal control,”IEEE Transactions on Intelligent Transportation Systems, vol. 26, no. 2, pp. 1701–1716, February 2025. [Online]. Available: https://ieeexplore.ieee.org/abstract/document/10768207/
-
[21]
LLMLight: Large language models as traffic signal control agents,
S. Lai, Z. Xu, W. Zhang, H. Liu, and H. Xiong, “LLMLight: Large language models as traffic signal control agents,” inProceedings of the 31st ACM SIGKDD Conference on Knowledge Discovery and Data Mining. ACM, 2025. [Online]. Available: https://dl.acm.org/doi/abs/ 10.1145/3690624.3709379
-
[22]
A. Pang, M. Wang, M.-O. Pun, C. S. Chen, and X. Xiong, “illm-tsc: Integration reinforcement learning and large language model for traffic signal control policy improvement,”IEEE Transactions on Vehicular Technology, pp. 1–14, 2026
work page 2026
-
[23]
A large language model agent-guided multi-agent system for adaptive traffic signal control,
M. Zhu and C. Zhu, “A large language model agent-guided multi-agent system for adaptive traffic signal control,” inKnowledge Science, Engineering and Management (KSEM 2025), ser. Lecture Notes in Computer Science (LNAI), vol. 15919. Springer, November 2025, pp. 59–70. [Online]. Available: https://link.springer.com/chapter/10.1007/ 978-981-95-3001-4\ 5
work page 2025
-
[24]
Large language models (LLMs) as traffic control systems at urban intersections: A new paradigm,
S. Masri, H. I. Ashqar, and M. Elhenawy, “Large language models (LLMs) as traffic control systems at urban intersections: A new paradigm,”Vehicles, vol. 7, no. 1, p. 11, 2025. [Online]. Available: https://www.mdpi.com/2624-8921/7/1/11
work page 2025
-
[25]
R. Duraku and D. Boshnjaku, “Enhancing traffic sustainability: An analysis of isolation intersection effectiveness through fixed time and logic control design using visvap algorithm,”Sustainability, vol. 16, no. 7, p. 2930, 2024
work page 2024
-
[26]
Adaptive traffic signal timing optimization using deep reinforcement learning in urban networks,
Z. Wu, S. Wang, C. Ni, and J. Wu, “Adaptive traffic signal timing optimization using deep reinforcement learning in urban networks,” Artificial Intelligence and Machine Learning Research, 2024. [Online]. Available: https://scipublication.com/index.php/AIMLR/article/view/119
work page 2024
-
[27]
A. K. Shafik and H. A. Rakha, “Decentralized cycle-free game-theoretic adaptive traffic signal control: Model enhancement and testing on isolated signalized intersections,”Sensors, vol. 25, no. 20, p. 6339, 2025
work page 2025
-
[28]
Adaptive traffic signal control using genetic algorithm for a 2×2 traffic network,
M. K. Tan, S. Q. Chai, H. S. Ee Chuo, K. G. Lim, H. H. Goh, and K. T. K. Teo, “Adaptive traffic signal control using genetic algorithm for a 2×2 traffic network,” in2024 IEEE International Conference on Artificial Intelligence in Engineering and Technology (IICAIET), Aug 2024, pp. 488–493
work page 2024
-
[29]
A decentralized signal-free intersection control framework for connected and autonomous vehicles,
H. Guan, Q. Bai, and Q. Meng, “A decentralized signal-free intersection control framework for connected and autonomous vehicles,”IEEE Transactions on Consumer Electronics, vol. 71, no. 2, pp. 6193–6200, May 2025
work page 2025
-
[30]
Centrally coordinated vehicles in a signal free intersection,
G. Rostomyan, K. Savla, and P. A. Ioannou, “Centrally coordinated vehicles in a signal free intersection,” in2024 IEEE 27th International Conference on Intelligent Transportation Systems (ITSC), Sep. 2024, pp. 3279–3284
work page 2024
-
[31]
Cooperative driving at multiple unsignalized intersections in fully autonomous driv- ing scenarios,
W. Pan, B. Lin, Y . Wang, Z. Yu, X. Zhao, X. He, and J. Ye, “Cooperative driving at multiple unsignalized intersections in fully autonomous driv- ing scenarios,”IEEE Transactions on Intelligent Transportation Systems, 2025
work page 2025
-
[32]
Artificial intelligence-based adaptive traffic signal control system: A comprehensive review,
A. Agrahari, M. M. Dhabu, P. S. Deshpande, A. Tiwari, M. A. Baig, and A. D. Sawarkar, “Artificial intelligence-based adaptive traffic signal control system: A comprehensive review,”Electronics, vol. 13, no. 19, p. 3875, 2024
work page 2024
-
[33]
M. Hassan, T. D. Turjo, A. H. Rambe, M. Jusoh, M. K. Islam, M. Hafizur Rahman, M. S. Alam, and M. M. Rahman, “A compre- hensive survey of adaptive traffic signal control: Methods, applications, challenges, and future research,”Archives of Computational Methods in Engineering, pp. 1–64, 2026
work page 2026
-
[34]
On 5g-v2x use cases and enabling technologies: A comprehensive survey,
A. Alalewi, I. Dayoub, and S. Cherkaoui, “On 5g-v2x use cases and enabling technologies: A comprehensive survey,”IEEE Access, vol. 9, pp. 107 710–107 737, 2021
work page 2021
-
[35]
Z. Zhong, E. E. Lee, M. Nejad, and J. Lee, “Influence of cav clustering strategies on mixed traffic flow characteristics: An analysis of vehicle trajectory data,”Transportation Research Part C: Emerging Technologies, vol. 115, p. 102611, 2020. [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0968090X19307648
work page 2020
-
[36]
Measuring massive multitask language understanding,
D. Hendrycks, C. Burns, S. Basart, A. Zou, M. Mazeika, D. Song, and J. Steinhardt, “Measuring massive multitask language understanding,”
-
[37]
Measuring Massive Multitask Language Understanding
[Online]. Available: https://arxiv.org/abs/2009.03300
work page internal anchor Pith review Pith/arXiv arXiv 2009
-
[38]
Evaluating Large Language Models Trained on Code
M. Chen, J. Tworek, H. Jun, Q. Yuan, H. P. de Oliveira Pinto, J. Kaplan, H. Edwards, Y . Burda, N. Joseph, G. Brockman, A. Ray, R. Puri, G. Krueger, M. Petrov, H. Khlaaf, G. Sastry, P. Mishkin, B. Chan, S. Gray, N. Ryder, M. Pavlov, A. Power, L. Kaiser, M. Bavarian, C. Winter, P. Tillet, F. P. Such, D. Cummings, M. Plappert, F. Chantzis, E. Barnes, A. Her...
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[39]
M. A. Ferrag, A. Lakas, and M. Debbah, “Agentdrive: An open benchmark dataset for agentic ai reasoning with llm-generated scenarios in autonomous systems,” 2026. [Online]. Available: https: //arxiv.org/abs/2601.16964
-
[40]
Microscopic traffic simulation using sumo,
P. A. Lopez, M. Behrisch, L. Bieker-Walz, J. Erdmann, Y .-P. Fl ¨otter¨od, R. Hilbrich, L. L ¨ucken, J. Rummel, P. Wagner, and E. Wießner, “Microscopic traffic simulation using sumo,” inProceedings of the 21st IEEE International Conference on Intelligent Transportation Systems. IEEE, 2018, pp. 2575–2582
work page 2018
-
[41]
Washington, DC: The National Academies Press, 2022
Transportation Research Board and National Academies of Sciences, Engineering, and Medicine,Highway Capacity Manual 7th Edition: A Guide for Multimodal Mobility Analysis. Washington, DC: The National Academies Press, 2022. [Online]. Available: https://nap.nationalacademies.org/catalog/26432/ highway-capacity-manual-7th-edition-a-guide-for-multimodal-mobility
work page 2022
-
[42]
Lost in the Middle: How Language Models Use Long Contexts
N. F. Liu, K. Lin, J. Hewitt, A. Paranjape, M. Bevilacqua, F. Petroni, and P. Liang, “Lost in the middle: How language models use long contexts,”Transactions of the Association for Computational Linguistics, vol. 12, pp. 157–173, 02 2024. [Online]. Available: https://doi.org/10.1162/tacl a 00638
work page internal anchor Pith review doi:10.1162/tacl 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.