Learning Cross-Coupled and Regime Dependent Dynamics for Aerial Manipulation
Pith reviewed 2026-06-30 20:48 UTC · model grok-4.3
The pith
A nonlinear encoder with linear decoder learns cross-coupled residual dynamics and adapts online to regime changes in aerial manipulators.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
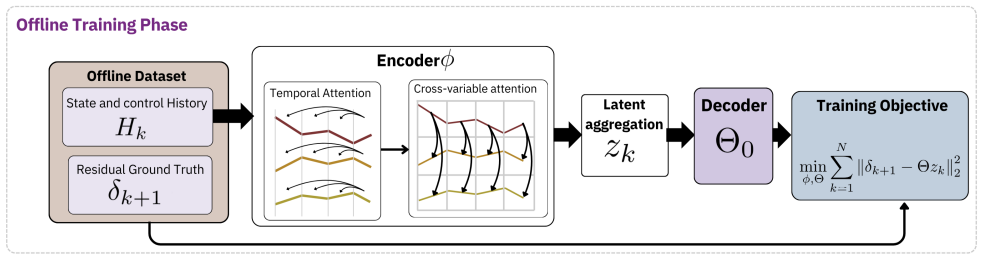
The framework pairs a nonlinear latent encoder that captures cross-variable coupling and history dependence with a linear-in-parameter latent decoder that enables closed-form Bayesian adaptation and consistency-driven covariance inflation, allowing the model to track nonstationary regime-dependent residual dynamics during deployment without sacrificing real-time compatibility.
What carries the argument
Nonlinear latent encoder paired with linear-in-parameter latent decoder that supports closed-form Bayesian adaptation and covariance inflation for nonstationary residual dynamics.
If this is right
- Residual prediction accuracy improves under coupled and history-dependent effects from quadrotor-manipulator interaction.
- Online adaptation becomes feasible for both sudden transients and gradual regime shifts without offline retraining.
- MPC trajectory tracking performance increases on physical hardware when the adapted model is used in the controller.
- The approach remains computationally compatible with real-time control loops due to the closed-form updates.
Where Pith is reading between the lines
- The same encoder-decoder split could be tested on other underactuated systems that exhibit payload-dependent coupling.
- Combining the linear decoder with additional regularization might further reduce sensitivity to measurement noise during adaptation.
- The method suggests a route to hybrid models that start from analytical approximations and learn only the nonstationary residuals.
Load-bearing premise
The linear-in-parameter structure of the latent decoder permits closed-form Bayesian adaptation together with consistency-driven covariance inflation that remains stable and real-time compatible under both transient and slowly varying regime changes.
What would settle it
An experiment on the aerial platform in which rapid payload or configuration changes cause the adapted residual predictions to lose accuracy or produce unstable MPC trajectories despite the covariance inflation step.
Figures







read the original abstract
Accurate dynamics models are critical for aerial manipulators operating under complex tasks such as payload transport. However, modeling these systems remains fundamentally challenging due to strong quadrotor-manipulator coupling, delayed aerodynamic interactions, and regime-dependent dynamics variations arising from payload changes and manipulator reconfiguration. These effects produce residual dynamics that are simultaneously cross-coupled, history-dependent, and nonstationary, causing both analytical models and purely offline learned models to degrade during deployment. To address these challenges, we propose a structured encoder-decoder framework for adaptive residual dynamics learning in aerial manipulators. The proposed nonlinear latent encoder captures cross-variable coupling and temporal dependencies from state-input histories, while a lightweight linear latent decoder enables online adaptation under regime-dependent nonstationary dynamics. The linear-in-parameter decoder structure permits closed-form Bayesian adaptation together with consistency-driven covariance inflation, enabling rapid and stable adaptation to both transient and slowly varying dynamics changes while remaining compatible with real-time model predictive control (MPC). Experimental results on a real aerial manipulation platform demonstrate improved residual prediction accuracy, faster adaptation under changing operating conditions, and enhanced MPC-based trajectory tracking performance. These results highlight the importance of jointly modeling coupled temporal dynamics and deployment-time nonstationarity for reliable aerial manipulation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a structured encoder-decoder framework for learning residual dynamics of aerial manipulators. A nonlinear latent encoder extracts cross-variable coupling and history-dependent effects from state-input sequences; a linear-in-parameter latent decoder then supports closed-form Bayesian adaptation augmented by consistency-driven covariance inflation. The construction is presented as enabling rapid, stable online adaptation to both transient and slow regime changes (payload, configuration) while remaining compatible with real-time MPC. Experiments on a physical platform are stated to demonstrate improved residual prediction accuracy, faster adaptation, and better MPC trajectory tracking.
Significance. If the stability and real-time properties of the adaptation rule hold, the approach would provide a practical route to handling nonstationary, cross-coupled residuals that defeat both analytic models and purely offline learners. The explicit separation of nonlinear encoding from linear decoding, together with the closed-form update, is a concrete technical contribution that could be adopted in other underactuated robotic systems with regime shifts.
major comments (2)
- [Abstract] Abstract: the central experimental claim (improved residual prediction accuracy, faster adaptation, enhanced MPC tracking) is stated without any quantitative metrics, baselines, data-exclusion criteria, or error bars. This absence makes it impossible to assess whether the reported gains are load-bearing for the framework.
- [Methods] Methods (linear latent decoder and covariance inflation rule): the claim that the linear-in-parameter structure plus consistency-driven inflation remains stable and real-time compatible under abrupt transient regime shifts rests on an unverified assumption. No derivation, bound, or counter-example check is supplied showing that history-dependent latents produced by the nonlinear encoder cannot drive covariance growth or divergence; this assumption is load-bearing for the online-adaptation guarantee.
minor comments (1)
- [Methods] Notation for the latent variables and the precise form of the consistency-driven inflation term should be introduced with an explicit equation reference rather than descriptive text only.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments help clarify the presentation of our contributions. We provide point-by-point responses to the major comments below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central experimental claim (improved residual prediction accuracy, faster adaptation, enhanced MPC tracking) is stated without any quantitative metrics, baselines, data-exclusion criteria, or error bars. This absence makes it impossible to assess whether the reported gains are load-bearing for the framework.
Authors: We concur that including quantitative metrics would make the abstract more informative. The full manuscript contains detailed experimental results with metrics and baselines. We will revise the abstract to include key quantitative findings, such as specific error reductions and tracking improvements, to better substantiate the claims. revision: yes
-
Referee: [Methods] Methods (linear latent decoder and covariance inflation rule): the claim that the linear-in-parameter structure plus consistency-driven inflation remains stable and real-time compatible under abrupt transient regime shifts rests on an unverified assumption. No derivation, bound, or counter-example check is supplied showing that history-dependent latents produced by the nonlinear encoder cannot drive covariance growth or divergence; this assumption is load-bearing for the online-adaptation guarantee.
Authors: The referee correctly identifies that a formal proof of stability is not provided. The design of the covariance inflation is intended to ensure stability by increasing uncertainty when predictions are inconsistent with observations, and the linear structure allows efficient computation. We will add to the methods section a more thorough explanation of why the nonlinear encoder's outputs do not lead to divergence in practice, supported by additional analysis of the update rule. However, deriving general bounds for all possible latent sequences is challenging and will be listed as future work. revision: partial
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper introduces a novel structured encoder-decoder framework with a nonlinear latent encoder for cross-coupling and temporal dependencies, paired with a linear-in-parameter latent decoder for closed-form Bayesian adaptation and covariance inflation. This is presented as an original design choice enabling real-time MPC compatibility, with performance validated on independent experimental data from a real aerial manipulation platform. No steps reduce by construction to self-definitions, fitted inputs renamed as predictions, or load-bearing self-citations. The central claims rest on external benchmarks rather than internal equivalences, making the derivation self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Orsag, C
M. Orsag, C. Korpela, P. Oh, S. Bogdan, and A. Ollero,Aerial Manipulation. Springer, 2018
2018
-
[2]
Performance, precision, and payloads: Adaptive nonlinear mpc for quadrotors,
D. Hanover, P. Foehn, S. Sun, E. Kaufmann, and D. Scaramuzza, “Performance, precision, and payloads: Adaptive nonlinear mpc for quadrotors,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 690–697, 2021
2021
-
[3]
An integrated approach to aerial grasping: Combining a bistable gripper with adaptive control,
R. D. Yadav, B. Jones, S. Gupta, A. Sharma, J. Sun, J. Zhao, and S. Roy, “An integrated approach to aerial grasping: Combining a bistable gripper with adaptive control,”IEEE/ASME Transactions on Mechatronics, 2025
2025
-
[4]
Aerial manipulation: A literature review,
F. Ruggiero, V . Lippiello, and A. Ollero, “Aerial manipulation: A literature review,”IEEE Robotics and Automation Letters, vol. 3, no. 3, pp. 1957–1964, 2018
1957
-
[5]
Benchmarks for aerial manipulation,
A. Suarez, V . M. Vega, M. Fernandez, G. Heredia, and A. Ollero, “Benchmarks for aerial manipulation,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2650–2657, 2020
2020
-
[6]
Modular adaptive aerial manipulation under unknown dynamic coupling forces,
R. D. Yadav, S. Dantu, W. Pan, S. Sun, S. Roy, and S. Baldi, “Modular adaptive aerial manipulation under unknown dynamic coupling forces,” IEEE/ASME Transactions on Mechatronics, vol. 30, no. 4, pp. 2688– 2698, 2024
2024
-
[7]
Past, present, and future of aerial robotic manipulators,
A. Ollero, M. Tognon, A. Suarez, D. Lee, and A. Franchi, “Past, present, and future of aerial robotic manipulators,”IEEE Transactions on Robotics, vol. 38, no. 1, pp. 626–645, 2022
2022
-
[8]
Neurobem: Hybrid aerodynamic quadrotor model,
L. Bauersfeld, E. Kaufmann, P. Foehn, S. Sun, and D. Scaramuzza, “Neurobem: Hybrid aerodynamic quadrotor model,”arXiv preprint arXiv:2106.08015, 2021
-
[9]
Accurate control of aerial ma- nipulators outdoors. a reliable and self-coordinated nonlinear approach,
J. Acosta, C. De Cos, and A. Ollero, “Accurate control of aerial ma- nipulators outdoors. a reliable and self-coordinated nonlinear approach,” Aerospace Science and Technology, vol. 99, p. 105731, 2020
2020
-
[10]
A survey of robot manipulation in contact,
M. Suomalainen, Y . Karayiannidis, and V . Kyrki, “A survey of robot manipulation in contact,”Robotics and Autonomous Systems, vol. 156, p. 104224, 2022
2022
-
[11]
Hybrid direct collocation and control in the constraint-consistent subspace for dynamic legged robot locomotion
D. Pardo, M. Neunert, A. W. Winkler, R. Grandia, and J. Buchli, “Hybrid direct collocation and control in the constraint-consistent subspace for dynamic legged robot locomotion.” inRobotics: Science and Systems, vol. 10, 2017
2017
-
[12]
Aerial manipulation using model predictive control for opening a hinged door,
D. Lee, H. Seo, D. Kim, and H. J. Kim, “Aerial manipulation using model predictive control for opening a hinged door,” in2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 1237–1242
2020
-
[13]
Survey on aerial manipulator: System, modeling, and control,
X. Meng, Y . He, and J. Han, “Survey on aerial manipulator: System, modeling, and control,”Robotica, vol. 38, no. 7, pp. 1288–1317, 2020
2020
-
[14]
Learning quadrotor dynamics for precise, safe, and agile flight control,
A. Saviolo and G. Loianno, “Learning quadrotor dynamics for precise, safe, and agile flight control,”Annual Reviews in Control, vol. 55, pp. 45–60, 2023
2023
-
[15]
Learning- based modeling and predictive control for unknown nonlinear system with stability guarantees,
A. Jin, F. Zhang, G. Shen, B. Huang, and P. Huang, “Learning- based modeling and predictive control for unknown nonlinear system with stability guarantees,”IEEE Transactions on Neural Networks and Learning Systems, vol. 36, no. 6, pp. 11 135–11 148, 2025
2025
-
[16]
Online dynamics learning for predictive control with an application to aerial robots,
T. Z. Jiahao, K. Y . Chee, and M. A. Hsieh, “Online dynamics learning for predictive control with an application to aerial robots,” inConference on Robot Learning. PMLR, 2023, pp. 2251–2261
2023
-
[17]
Neural lander: Stable drone landing control using learned dynamics,
G. Shi, X. Shi, M. O’Connell, R. Yu, K. Azizzadenesheli, A. Anand- kumar, Y . Yue, and S.-J. Chung, “Neural lander: Stable drone landing control using learned dynamics,” in2019 international conference on robotics and automation (icra). IEEE, 2019, pp. 9784–9790
2019
-
[18]
Real-time neural mpc: Deep learning model predictive control for quadrotors and agile robotic platforms,
T. Salzmann, E. Kaufmann, J. Arrizabalaga, M. Pavone, D. Scaramuzza, and M. Ryll, “Real-time neural mpc: Deep learning model predictive control for quadrotors and agile robotic platforms,”IEEE Robotics and Automation Letters, vol. 8, no. 4, pp. 2397–2404, 2023
2023
-
[19]
Data-driven mpc for quadrotors,
G. Torrente, E. Kaufmann, P. F ¨ohn, and D. Scaramuzza, “Data-driven mpc for quadrotors,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3769–3776, 2021
2021
-
[20]
Computation- aware learning for stable control with gaussian process,
W. Cao, A. Capone, R. Yadav, S. Hirche, and W. Pan, “Computation- aware learning for stable control with gaussian process,” inProceedings of Robotics: Science and Systems (RSS), 2024
2024
-
[21]
Physics-inspired temporal learning of quadrotor dynamics for accurate model predictive trajectory tracking,
A. Saviolo, G. Li, and G. Loianno, “Physics-inspired temporal learning of quadrotor dynamics for accurate model predictive trajectory tracking,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 10 256–10 263, 2022
2022
-
[22]
Multistep prediction of dynamic systems with recurrent neural networks,
N. Mohajerin and S. L. Waslander, “Multistep prediction of dynamic systems with recurrent neural networks,”IEEE Transactions on Neural Networks and Learning Systems, vol. 30, no. 11, pp. 3370–3383, 2019
2019
-
[23]
Enhancing sample efficiency and uncertainty compensation in learning-based model predictive control for aerial robots,
K. Y . Chee, T. C. Silva, M. A. Hsieh, and G. J. Pappas, “Enhancing sample efficiency and uncertainty compensation in learning-based model predictive control for aerial robots,” in2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2023, pp. 9435–9441
2023
-
[24]
How to learn and generalize from three minutes of data: Physics-constrained and uncertainty-aware neural stochastic differential equations,
F. Djeumou, C. Neary, and U. Topcu, “How to learn and generalize from three minutes of data: Physics-constrained and uncertainty-aware neural stochastic differential equations,” inConference on Robot Learning. PMLR, 2023, pp. 577–601
2023
-
[25]
Investigating compound- ing prediction errors in learned dynamics models,
N. Lambert, K. Pister, and R. Calandra, “Investigating compound- ing prediction errors in learned dynamics models,”arXiv preprint arXiv:2203.09637, 2022
-
[26]
Active learn- ing of discrete-time dynamics for uncertainty-aware model predictive control,
A. Saviolo, J. Frey, A. Rathod, M. Diehl, and G. Loianno, “Active learn- ing of discrete-time dynamics for uncertainty-aware model predictive control,”IEEE Transactions on Robotics, vol. 40, pp. 1273–1291, 2024
2024
-
[27]
Simultaneous system identification and model predictive control with no dynamic regret,
H. Zhou and V . Tzoumas, “Simultaneous system identification and model predictive control with no dynamic regret,”IEEE Transactions on Robotics, 2025
2025
-
[28]
Meta-learning enhanced model predictive contouring control for agile and precise quadrotor flight,
M. Wei, L. Zheng, Y . Wu, R. Mei, and H. Cheng, “Meta-learning enhanced model predictive contouring control for agile and precise quadrotor flight,”IEEE Transactions on Robotics, vol. 41, pp. 3590– 3608, 2025
2025
-
[29]
Cyclical learning rates for training neural networks,
L. N. Smith, “Cyclical learning rates for training neural networks,” in2017 IEEE winter conference on applications of computer vision (WACV). IEEE, 2017, pp. 464–472
2017
-
[30]
Neural-fly enables rapid learning for agile flight in strong winds,
M. O’Connell, G. Shi, X. Shi, K. Azizzadenesheli, A. Anandkumar, Y . Yue, and S.-J. Chung, “Neural-fly enables rapid learning for agile flight in strong winds,”Science Robotics, vol. 7, no. 66, p. eabm6597, 2022
2022
-
[31]
Proto-mpc: An encoder- prototype-decoder approach for quadrotor control in challenging winds,
Y . Gu, S. Cheng, and N. Hovakimyan, “Proto-mpc: An encoder- prototype-decoder approach for quadrotor control in challenging winds,” in6th Annual Learning for Dynamics & Control Conference. PMLR, 2024, pp. 1765–1776
2024
-
[32]
Physics- constrained meta-learning for online adaptation and estimation in posi- tioning applications,
A. Chakrabarty, V . Deshpande, G. Wichern, and K. Berntorp, “Physics- constrained meta-learning for online adaptation and estimation in posi- tioning applications,” in2024 IEEE 63rd Conference on Decision and Control (CDC). IEEE, 2024, pp. 1561–1566
2024
-
[33]
Fast online adaptation in robotics through meta-learning embeddings of simulated priors,
R. Kaushik, T. Anne, and J.-B. Mouret, “Fast online adaptation in robotics through meta-learning embeddings of simulated priors,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 5269–5276
2020
-
[34]
L1-gp: L1 adaptive control with bayesian learning,
A. Gahlawat, P. Zhao, A. Patterson, N. Hovakimyan, and E. Theodorou, “L1-gp: L1 adaptive control with bayesian learning,” inLearning for dynamics and control. PMLR, 2020, pp. 826–837
2020
-
[35]
Meta learning with paired forward and inverse models for efficient receding horizon control,
C. D. McKinnon and A. P. Schoellig, “Meta learning with paired forward and inverse models for efficient receding horizon control,”IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3240–3247, 2021
2021
-
[36]
Safe active dynamics learning and control: A sequential exploration–exploitation framework,
T. Lew, A. Sharma, J. Harrison, A. Bylard, and M. Pavone, “Safe active dynamics learning and control: A sequential exploration–exploitation framework,”IEEE Transactions on Robotics, vol. 38, no. 5, pp. 2888– 2907, 2022
2022
-
[37]
Adaptive-control- oriented meta-learning for nonlinear systems,
S. Richards, N. Azizan, J.-J. Slotine, and M. Pavone, “Adaptive-control- oriented meta-learning for nonlinear systems,” inRobotics science and systems, 2021
2021
-
[38]
Attention is all you need,
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polosukhin, “Attention is all you need,”Advances in neural information processing systems, vol. 30, 2017
2017
-
[39]
Learning long-horizon predictions for quadrotor dynamics,
P. P. Rao, A. Saviolo, T. C. Ferrari, and G. Loianno, “Learning long-horizon predictions for quadrotor dynamics,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 12 758–12 765
2024
-
[40]
Droned- iffusion: Robust quadrotor dynamics learning with diffusion models,
A. Das, R. D. Yadav, S. Sun, M. Sun, S. Kaski, and W. Pan, “Droned- iffusion: Robust quadrotor dynamics learning with diffusion models,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 1604–1610
2025
-
[41]
Crossformer: Transformer utilizing cross- dimension dependency for multivariate time series forecasting,
Y . Zhang and J. Yan, “Crossformer: Transformer utilizing cross- dimension dependency for multivariate time series forecasting,” inThe eleventh international conference on learning representations, 2023
2023
-
[42]
Mcformer: multivariate time series forecasting with mixed-channels transformer,
W. Han, T. Zhu, L. Chen, H. Ning, Y . Luo, and Y . Wan, “Mcformer: multivariate time series forecasting with mixed-channels transformer,” IEEE Internet of Things Journal, vol. 11, no. 17, pp. 28 320–28 329, 2024
2024
- [43]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.