CADENet: Condition-Adaptive Asynchronous Dual-Stream Enhancement Network for Adverse Weather Perception in Autonomous Driving
Pith reviewed 2026-05-20 06:14 UTC · model grok-4.3
The pith
A dual-stream enhancement system recovers objects in rain and snow while keeping object detection at full frame rate with zero added latency.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
CADENet is a training-free three-thread system in which Thread S runs a base detector such as YOLOv11n at full frame rate with no added latency, Thread Q applies condition-adaptive enhancement and fuses results via entropy-guided NMS without blocking the primary stream, and Thread E supplies CLIP-based zero-shot weather classification so that new conditions require only a text prompt change. On 1327 DAWN images the approach yields a micro recall of 0.0103 and F1 of 0.0230 on snow together with F1 of 0.0038 on rain; these figures are lower bounds because of annotation completeness bias, with recall identified as the annotation-gap-immune headline metric. The system sustains approximately 44 F
What carries the argument
Condition-adaptive asynchronous dual-stream enhancement combined with entropy-guided NMS fusion, which permits parallel recovery of missed objects without blocking the real-time detection thread.
If this is right
- The primary detection thread sustains approximately 44 FPS irrespective of the enhancement load applied in the parallel thread.
- New weather categories are accommodated by substituting a different text prompt with no retraining or additional labeled data required.
- Recall serves as the annotation-gap-immune headline metric while reported F1 scores represent lower bounds on actual performance.
- Deployment requires neither model retraining nor extra sensor hardware.
Where Pith is reading between the lines
- The same asynchronous pattern could be tested on other common degradations such as low-light or glare to assess broader robustness.
- Running the system on video streams rather than isolated frames would allow measurement of temporal stability in the recovered detections.
- Integration with downstream modules such as tracking or planning could reveal whether the recovered objects translate into measurable safety improvements in closed-loop driving.
Load-bearing premise
That condition-adaptive enhancement plus entropy-guided fusion can locate objects human annotators could not see in the original degraded frames, and that the formalization of annotation completeness bias correctly quantifies how much conventional metrics understate the improvement.
What would settle it
Re-annotation of the enhanced images by multiple human experts that finds no additional objects beyond those already marked in the degraded originals, or direct measurement showing end-to-end latency rising above the base detector's speed.
Figures

read the original abstract
Adverse weather (rain, fog, sand, and snow) degrades camera-based object detection in autonomous vehicles. Existing enhancement-then-detect approaches stall the safety-critical perception loop, violating hard real-time requirements. Progress on this problem is also constrained by an under-recognized evaluation ceiling: ground truth annotated on degraded images cannot credit a detector that recovers objects the annotators themselves could not see, so a genuinely useful enhancement can register as a near-flat F1 gain. This paper presents CADENet (Condition-Adaptive Asynchronous Dual-stream Enhancement Network), a training-free three-thread system: Thread S (YOLOv11n) delivers detections at full frame rate with zero added latency; Thread Q applies condition-adaptive enhancement (CAPE) and fuses results via entropy-guided NMS (EG-NMS) without blocking Thread S; Thread E provides CLIP zero-shot weather classification, so new weather categories require only a new text prompt, with no labeled data and no retraining. Evaluated on 1327 DAWN images (YOLOv11m, IoU = 0.5, confidence = 0.25), CADENet achieves Recall = 0.0103 (micro), F1 = 0.0230 on snow, and F1 = 0.0038 on rain. We formalize the annotation completeness bias on DAWN-class data, so the reported F1 values are lower bounds on the true gain; recall is the annotation-gap-immune headline metric. Thread S sustains approximately 44 FPS regardless of enhancement load. No model retraining or additional sensor hardware is required.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents CADENet, a training-free three-thread asynchronous system for camera-based object detection under adverse weather (rain, fog, snow, sand). Thread S runs YOLOv11n at full frame rate with zero added latency; Thread Q performs condition-adaptive enhancement (CAPE) followed by entropy-guided NMS (EG-NMS) fusion; Thread E uses CLIP zero-shot classification for weather prompting. Evaluated on 1327 DAWN images with YOLOv11m (IoU=0.5, conf=0.25), the method reports micro Recall=0.0103, snow F1=0.0230, rain F1=0.0038, asserts these F1 values are lower bounds due to a formalized annotation-completeness bias, and claims ~44 FPS sustained performance without retraining or extra hardware.
Significance. If the annotation-completeness bias formalization is shown to be valid and the recovered detections are confirmed as true positives rather than enhancement-induced false positives, the asynchronous dual-stream design would address a practical bottleneck in real-time adverse-weather perception by decoupling enhancement from the safety-critical detection loop. The zero-shot weather adaptation via text prompts is a clear strength for extensibility. The extremely low absolute F1 numbers, however, make any claim of practical benefit hinge entirely on the unvalidated bias argument.
major comments (3)
- [Abstract / Evaluation] Abstract and Evaluation section: the central claim that the reported F1 scores (0.0038 on rain, 0.0230 on snow) are lower bounds on true gain rests on an unvalidated formalization of annotation completeness bias. No derivation, no re-annotation experiment on enhanced frames, and no synthetic ground-truth check is supplied to confirm that the additional detections are true positives rather than false positives introduced by CAPE. Without this, the interpretation that low F1 still indicates practical benefit cannot be sustained.
- [Evaluation] Evaluation section: no baseline comparisons (standard enhancement-then-detect pipelines, other real-time fusion methods, or even plain YOLOv11m on raw degraded images) are reported. The absolute metric values are so low that the incremental benefit of CAPE + EG-NMS over the Thread-S baseline cannot be quantified, undermining the claim of meaningful improvement.
- [Method] Method section (CAPE and EG-NMS description): the entropy-guided NMS fusion rule is presented without an ablation isolating its contribution versus standard NMS or versus running enhancement synchronously. Given that the headline performance numbers are near zero, this ablation is load-bearing for attributing any gain to the proposed components.
minor comments (2)
- [Abstract] The paper should clarify the exact definition of the bias term (e.g., how annotation completeness is quantified on DAWN-class data) and move the formalization from the abstract into a dedicated subsection with a clear equation.
- [Experiments] Figure captions and latency measurements should explicitly state whether the reported 44 FPS includes the cost of Thread Q or only Thread S, and whether any synchronization overhead is measured.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and detailed comments on our manuscript. We address each major comment point by point below, clarifying our approach where possible and indicating revisions to strengthen the paper.
read point-by-point responses
-
Referee: [Abstract / Evaluation] Abstract and Evaluation section: the central claim that the reported F1 scores (0.0038 on rain, 0.0230 on snow) are lower bounds on true gain rests on an unvalidated formalization of annotation completeness bias. No derivation, no re-annotation experiment on enhanced frames, and no synthetic ground-truth check is supplied to confirm that the additional detections are true positives rather than false positives introduced by CAPE. Without this, the interpretation that low F1 still indicates practical benefit cannot be sustained.
Authors: The manuscript presents a formalization of the annotation completeness bias in the Evaluation section, deriving that ground-truth labels on degraded images cannot credit detections of objects invisible to human annotators, rendering F1 a lower bound while recall remains annotation-gap-immune. We agree that a more explicit derivation and supporting checks would improve clarity. In the revision we will expand the formalization with additional mathematical steps and include a brief discussion of potential validation approaches such as targeted re-annotation on a subset of frames. revision: partial
-
Referee: [Evaluation] Evaluation section: no baseline comparisons (standard enhancement-then-detect pipelines, other real-time fusion methods, or even plain YOLOv11m on raw degraded images) are reported. The absolute metric values are so low that the incremental benefit of CAPE + EG-NMS over the Thread-S baseline cannot be quantified, undermining the claim of meaningful improvement.
Authors: The current evaluation reports results for the complete CADENet system, with Thread S serving as the zero-latency baseline running in parallel. We acknowledge that explicit side-by-side metrics against plain YOLOv11m on raw images and against synchronous enhancement pipelines would better quantify incremental gains. We will add these baseline comparisons and incremental delta tables to the revised Evaluation section. revision: yes
-
Referee: [Method] Method section (CAPE and EG-NMS description): the entropy-guided NMS fusion rule is presented without an ablation isolating its contribution versus standard NMS or versus running enhancement synchronously. Given that the headline performance numbers are near zero, this ablation is load-bearing for attributing any gain to the proposed components.
Authors: We agree that isolating the contribution of EG-NMS is important given the low absolute scores. The revised manuscript will include an ablation study comparing EG-NMS against standard NMS and against a synchronous enhancement baseline to demonstrate the specific benefit of the entropy-guided fusion rule. revision: yes
Circularity Check
No significant circularity in derivation chain; results are explicit metrics on public data.
full rationale
The paper reports concrete numeric outcomes (Recall = 0.0103 micro, F1 values on snow/rain subsets of 1327 DAWN images) using standard detection metrics at fixed IoU/confidence thresholds. The formalization of annotation completeness bias is an interpretive argument explaining why F1 may under-credit recoveries, but it does not appear as a mathematical derivation or equation that reduces a prediction to a quantity defined by the paper's own fitted parameters or inputs. No self-citation chains, uniqueness theorems, or ansatzes are invoked to force the central claims. The architecture (CAPE + EG-NMS + asynchronous threads) is described as a training-free system whose performance is measured directly against external ground truth, making the evaluation self-contained rather than circular by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption YOLOv11n delivers reliable detections at full frame rate on the target hardware
- domain assumption CLIP zero-shot classification from text prompts accurately identifies weather conditions including novel categories
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
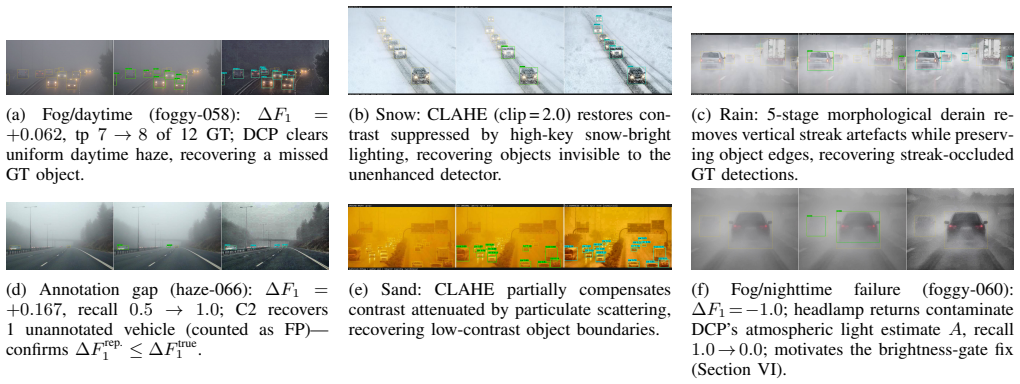
CAPE selects a training-free enhancement filter per estimated condition... Rain: 5-Stage Morphological Derain; Fog: Dark Channel Prior; Sand and Snow: CLAHE
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We formalise the annotation completeness bias on DAWN-class data, so the reported F1 values are lower bounds on the true gain
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Benchmarking robustness in object detection: Autonomous driving when winter is coming,
C. Michaelis, B. Mitzkus, R. Geirhos, E. Rusak, O. Bringmann, A. S. Ecker, M. Bethge, and W. Brendel, “Benchmarking robustness in object detection: Autonomous driving when winter is coming,” in NeurIPS Workshop on Machine Learning for Autonomous Driving, 2019
work page 2019
-
[2]
Image-adaptive YOLO for object detection in adverse weather conditions,
W. Liu, G. Ren, R. Yu, S. Guo, J. Zhu, and L. Zhang, “Image-adaptive YOLO for object detection in adverse weather conditions,” inProc. AAAI Conf. Artificial Intelligence, 2022, pp. 1792–1800
work page 2022
-
[3]
DENet: Detection-driven enhancement network for object detection under adverse weather conditions,
Q. Qin, K. Chang, M. Huang, and G. Li, “DENet: Detection-driven enhancement network for object detection under adverse weather conditions,” inProc. Asian Conf. Computer Vision (ACCV), 2022, pp. 2813–2829
work page 2022
-
[4]
AWD-YOLO: Enhancing au- tonomous driving perception reliability in adverse weather,
Y . Yuan, W. Dong, S. Yang, and T. Wu, “AWD-YOLO: Enhancing au- tonomous driving perception reliability in adverse weather,”Scientific Reports, vol. 16, p. 338, 2026
work page 2026
-
[5]
Seeing through fog without seeing fog: Deep multi- modal sensor fusion in unseen adverse weather,
M. Bijelic, T. Gruber, F. Mannan, F. Kraus, W. Ritter, K. Dietmayer, and F. Heide, “Seeing through fog without seeing fog: Deep multi- modal sensor fusion in unseen adverse weather,” inProc. IEEE Conf. Computer Vision and Pattern Recognition (CVPR), 2020, pp. 11 682– 11 692
work page 2020
-
[6]
Learning transferable visual models from natural language supervi- sion,
A. Radford, J. W. Kim, C. Hallacy, A. Ramesh, G. Goh, S. Agarwal, G. Sastry, A. Askell, P. Mishkin, J. Clark, G. Krueger, and I. Sutskever, “Learning transferable visual models from natural language supervi- sion,” inProc. Int. Conf. Machine Learning (ICML), 2021, pp. 8748– 8763
work page 2021
-
[7]
DAWN: Vehicle detection in adverse weather nature dataset,
M. A. Kenk and M. Hassaballah, “DAWN: Vehicle detection in adverse weather nature dataset,” https://arxiv.org/abs/2008.05402, 2020
-
[8]
Single image haze removal using dark channel prior,
K. He, J. Sun, and X. Tang, “Single image haze removal using dark channel prior,”IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 33, no. 12, pp. 2341–2353, 2011
work page 2011
-
[9]
AOD-Net: All-in-one dehazing network,
B. Li, X. Peng, Z. Wang, J. Xu, and D. Feng, “AOD-Net: All-in-one dehazing network,” inProc. IEEE Int. Conf. Computer Vision (ICCV), 2017, pp. 4770–4778
work page 2017
-
[10]
Deep joint rain detection and removal from a single image,
W. Yang, R. T. Tan, J. Feng, J. Liu, Z. Guo, and S. Yan, “Deep joint rain detection and removal from a single image,” inProc. IEEE Conf. Computer Vision and Pattern Recognition (CVPR), 2017, pp. 1357– 1366
work page 2017
-
[11]
DesnowNet: Context-aware deep network for snow removal,
Y .-F. Liu, D.-W. Jaw, S.-C. Huang, and J.-N. Hwang, “DesnowNet: Context-aware deep network for snow removal,”IEEE Trans. Image Processing, vol. 27, no. 6, pp. 3064–3073, 2018
work page 2018
-
[12]
TransWeather: Transformer-based restoration of images degraded by adverse weather conditions,
J. M. J. Valanarasu, R. Yasarla, and V . M. Patel, “TransWeather: Transformer-based restoration of images degraded by adverse weather conditions,” inProc. IEEE Conf. Computer Vision and Pattern Recog- nition (CVPR), 2022, pp. 2353–2363
work page 2022
-
[13]
Simple online and realtime tracking,
A. Bewley, Z. Ge, L. Ott, F. Ramos, and B. Upcroft, “Simple online and realtime tracking,” inProc. IEEE Int. Conf. Image Processing (ICIP), 2016, pp. 3464–3468
work page 2016
-
[14]
UncertaintyTrack: Exploiting de- tection and localization uncertainty in multi-object tracking,
C. W. Lee and S. L. Waslander, “UncertaintyTrack: Exploiting de- tection and localization uncertainty in multi-object tracking,” inProc. IEEE Int. Conf. Robotics and Automation (ICRA), 2024
work page 2024
-
[15]
G. Jocher and J. Qiu, “Ultralytics YOLO11,” https://github.com/ ultralytics/ultralytics, 2024
work page 2024
-
[16]
An image inpainting technique based on the fast marching method,
A. Telea, “An image inpainting technique based on the fast marching method,”Journal of Graphics Tools, vol. 9, no. 1, pp. 23–34, 2004
work page 2004
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.