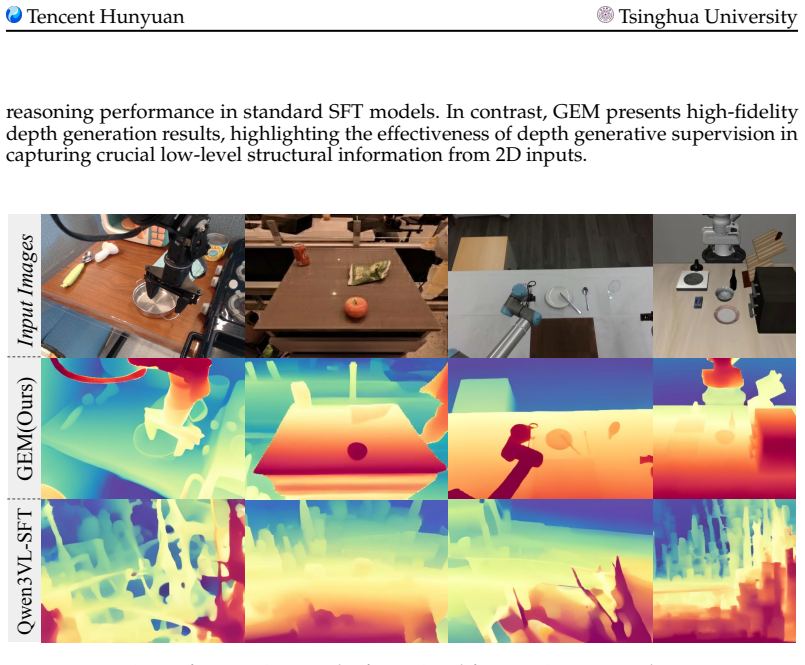
GEM: Generative Supervision Helps Embodied Intelligence
Pith reviewed 2026-06-29 13:35 UTC · model grok-4.3
The pith
Adding a depth map generation task to vision-language model pre-training improves performance on embodied robotics tasks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
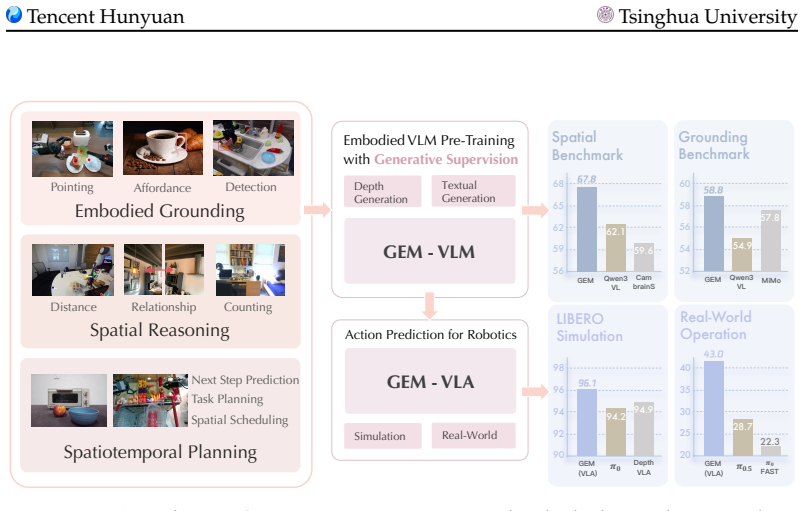
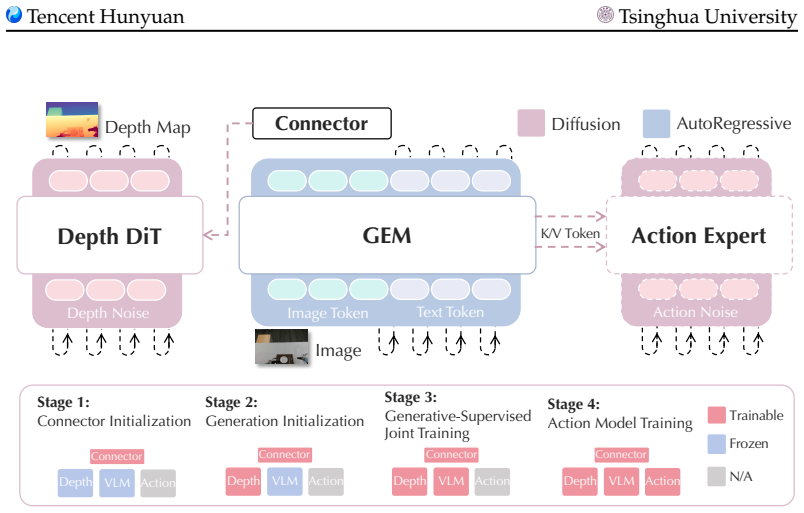
GEM integrates a depth map generation task directly into the pre-training of embodied vision-language models so that the generative objective supplies low-level spatial and physical knowledge absent from text-guided pre-training alone, producing measurable gains in both semantic understanding and physical operation capabilities when the tasks are trained jointly.
What carries the argument
The depth map generation task used as a joint generative supervision objective during VLM pre-training.
If this is right
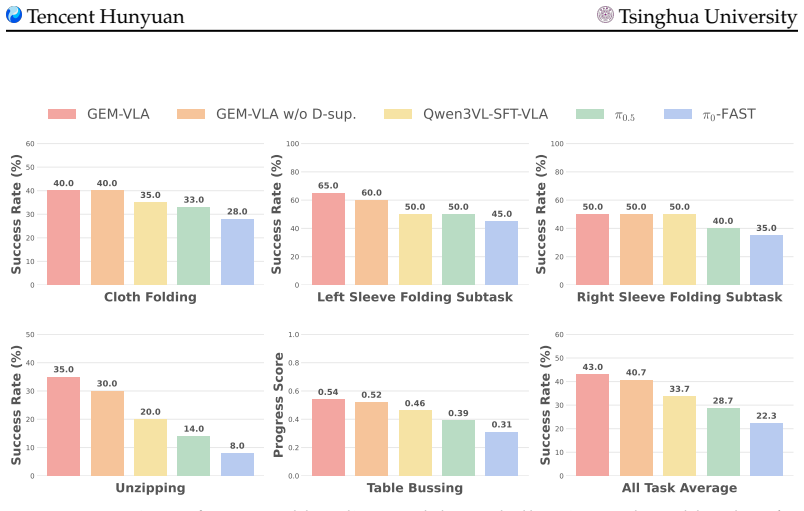
- Joint training with the depth generation objective produces substantial improvements in both semantic understanding and physical operation capabilities.
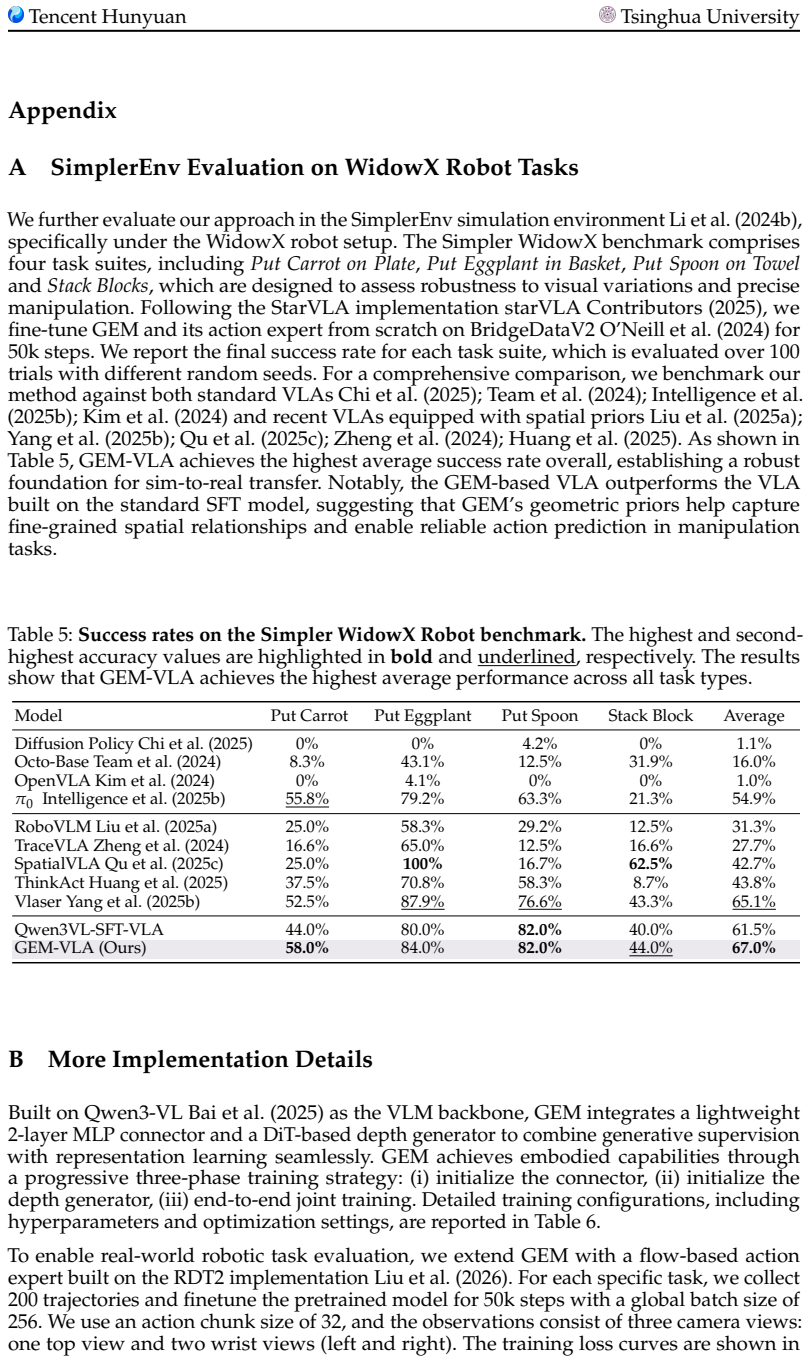
- The resulting models reach state-of-the-art results across diverse embodied benchmarks.
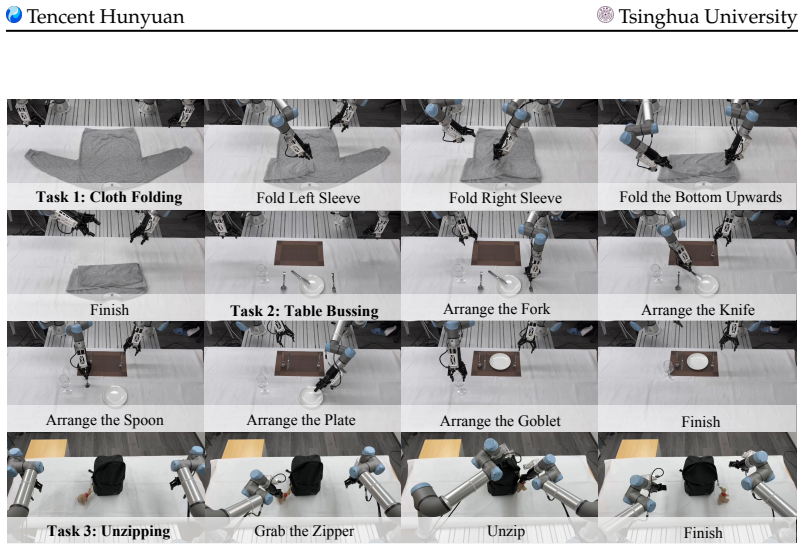
- The deployed GEM-VLA action model shows superior task execution in both simulation and real-world evaluations.
- The GEM-4M dataset of grounding, reasoning, planning, and depth data enables the joint training paradigm.
Where Pith is reading between the lines
- The same joint generative supervision pattern could be tested with other low-level signals such as surface normals or optical flow in place of depth.
- If the gains hold, embodied training pipelines might shift from separate perception and control stages toward unified generative pre-training.
- The approach raises the question of whether similar low-level generative tasks would improve non-embodied vision-language models on spatial reasoning benchmarks.
Load-bearing premise
The depth map generation task supplies the missing low-level spatial and physical knowledge that standard text-guided pre-training lacks, and this directly causes the reported gains in embodied performance.
What would settle it
An ablation experiment in which removing the depth generation objective from training produces no drop in performance on the embodied benchmarks or real-world tasks.
Figures



read the original abstract
Embodied Vision-Language Models (VLMs) have demonstrated impressive performance and generalization in robotics, particularly within Vision-Language-Action frameworks. However, a significant gap remains between the high-level semantic focus of standard text-guided pre-training paradigms and the low-level spatial and physical knowledge critical for execution in embodied environments. In this paper, we introduce GEM, a Generative-supervised Embodied vision-language Model designed to bridge this divide. We propose integrating a depth map generation task directly into the VLM pre-training phase. By training this generative objective jointly with the main model, we observe substantial improvements in embodied intelligence, significantly enhancing both semantic understanding and physical operation capabilities. To support this paradigm, we curate and release GEM-4M, a comprehensive large-scale dataset featuring a mixture of grounding, reasoning, and planning data paired with high-quality depth supervision. Extensive experiments demonstrate that GEM achieves state-of-the-art results across diverse embodied benchmarks. Furthermore, our deployed action model, GEM-VLA, exhibits vastly superior task execution abilities in both simulation environments and real-world evaluations. Code, models, and datasets are available at https://zhaorw02.github.io/GEM/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces GEM, a Generative-supervised Embodied vision-language Model that integrates a depth map generation task into the pre-training of embodied VLMs to address the gap between high-level semantic focus in text-guided training and low-level spatial/physical knowledge needed for execution. The authors curate and release the GEM-4M dataset (mixture of grounding, reasoning, and planning data with depth supervision) and report that joint training yields SOTA results on diverse embodied benchmarks plus superior task execution in simulation and real-world settings via the GEM-VLA action model.
Significance. If the results hold, the work is significant for embodied AI because it supplies concrete evidence that a generative depth objective can supply missing low-level spatial knowledge and improve both semantic understanding and physical operation. The open release of code, models, and the large-scale GEM-4M dataset is a clear strength that supports reproducibility and follow-on research.
minor comments (2)
- [Abstract] Abstract: the phrases 'substantial improvements' and 'vastly superior' are not accompanied by any numerical effect sizes or benchmark deltas; adding one or two concrete metrics would strengthen the summary.
- [Introduction] The motivation section should more explicitly contrast the depth-generation choice against other possible generative auxiliaries (e.g., surface-normal or segmentation prediction) and cite the relevant prior literature that motivated the selection.
Simulated Author's Rebuttal
We thank the referee for their positive summary of our work, recognition of its potential significance for embodied AI, and recommendation for minor revision. We appreciate the acknowledgment of the GEM-4M dataset release and the value placed on reproducibility.
Circularity Check
No significant circularity; empirical claims rest on external benchmarks
full rationale
The paper introduces GEM by adding a depth-map generation objective to VLM pre-training and reports gains on embodied benchmarks plus real-world GEM-VLA deployment. No equations, derivations, fitted parameters renamed as predictions, or self-citation chains appear in the provided text. The central claim is supported by curated dataset GEM-4M and independent evaluation metrics rather than any self-referential reduction. This is the normal case of an empirical contribution whose validity is tested outside its own construction.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 2 Pith papers
-
LIBERO-Safety: A Comprehensive Benchmark for Physical and Semantic Safety in Vision-Language-Action Models
LIBERO-Safety supplies a scalable benchmark, data-generation pipeline, and 19,664-demonstration dataset that exposes a generalization-safety tension in current VLA models where diverse training improves collision avoi...
-
LIBERO-Safety: A Comprehensive Benchmark for Physical and Semantic Safety in Vision-Language-Action Models
Introduces LIBERO-Safety benchmark with parametric scenario generation and 19,664 collision-free demonstrations, then evaluates VLA models to reveal a generalization-safety tension.
Reference graph
Works this paper leans on
-
[1]
write newline
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION format.date year duplicate empty "emp...
-
[2]
Cosmos-Reason1: From Physical Common Sense To Embodied Reasoning
Alisson Azzolini, Junjie Bai, Hannah Brandon, Jiaxin Cao, Prithvijit Chattopadhyay, Huayu Chen, Jinju Chu, Yin Cui, Jenna Diamond, Yifan Ding, et al. Cosmos-reason1: From physical common sense to embodied reasoning. arXiv preprint arXiv:2503.15558, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[3]
Shuai Bai, Yuxuan Cai, Ruizhe Chen, Keqin Chen, Xionghui Chen, Zesen Cheng, Lianghao Deng, Wei Ding, Chang Gao, Chunjiang Ge, et al. Qwen3-vl technical report. arXiv preprint arXiv:2511.21631, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[4]
ARKitScenes: A Diverse Real-World Dataset For 3D Indoor Scene Understanding Using Mobile RGB-D Data
Gilad Baruch, Zhuoyuan Chen, Afshin Dehghan, Tal Dimry, Yuri Feigin, Peter Fu, Thomas Gebauer, Brandon Joffe, Daniel Kurz, Arik Schwartz, et al. Arkitscenes: A diverse real-world dataset for 3d indoor scene understanding using mobile rgb-d data. arXiv preprint arXiv:2111.08897, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[5]
PaliGemma: A versatile 3B VLM for transfer
Lucas Beyer, Andreas Steiner, Andr \'e Susano Pinto, Alexander Kolesnikov, Xiao Wang, Daniel Salz, Maxim Neumann, Ibrahim Alabdulmohsin, Michael Tschannen, Emanuele Bugliarello, et al. Paligemma: A versatile 3b vlm for transfer. arXiv preprint arXiv:2407.07726, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[6]
RT-1: Robotics Transformer for Real-World Control at Scale
Anthony Brohan, Noah Brown, Justice Carbajal, Yevgen Chebotar, Joseph Dabis, Chelsea Finn, Keerthana Gopalakrishnan, Karol Hausman, Alex Herzog, Jasmine Hsu, et al. Rt-1: Robotics transformer for real-world control at scale. arXiv preprint arXiv:2212.06817, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[7]
Agibot world colosseo: A large-scale manipulation platform for scalable and intelligent embodied systems
Qingwen Bu, Jisong Cai, Li Chen, Xiuqi Cui, Yan Ding, Siyuan Feng, Xindong He, Xu Huang, et al. Agibot world colosseo: A large-scale manipulation platform for scalable and intelligent embodied systems. In 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025
2025
-
[8]
Scaling spatial intelligence with multimodal foundation models.arXiv preprint arXiv:2511.13719, 2025
Zhongang Cai, Ruisi Wang, Chenyang Gu, Fanyi Pu, Junxiang Xu, Yubo Wang, Wanqi Yin, Zhitao Yang, Chen Wei, Qingping Sun, Tongxi Zhou, Jiaqi Li, Hui En Pang, Oscar Qian, Yukun Wei, Zhiqian Lin, Xuanke Shi, Kewang Deng, Xiaoyang Han, Zukai Chen, Xiangyu Fan, Hanming Deng, Lewei Lu, Liang Pan, Bo Li, Ziwei Liu, Quan Wang, Dahua Lin, and Lei Yang. Scaling spa...
-
[9]
SAM 3: Segment Anything with Concepts
Nicolas Carion, Laura Gustafson, Yuan-Ting Hu, Shoubhik Debnath, Ronghang Hu, Didac Suris, Chaitanya Ryali, Kalyan Vasudev Alwala, Haitham Khedr, Andrew Huang, Jie Lei, Tengyu Ma, Baishan Guo, Arpit Kalla, Markus Marks, Joseph Greer, Meng Wang, Peize Sun, Roman Rädle, Triantafyllos Afouras, Effrosyni Mavroudi, Katherine Xu, Tsung-Han Wu, Yu Zhou, Liliane ...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[10]
WorldVLA: Towards Autoregressive Action World Model
Jun Cen, Chaohui Yu, Hangjie Yuan, Yuming Jiang, Siteng Huang, Jiayan Guo, Xin Li, Yibing Song, Hao Luo, Fan Wang, et al. Worldvla: Towards autoregressive action world model. arXiv preprint arXiv:2506.21539, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[11]
Chilam Cheang, Sijin Chen, Zhongren Cui, Yingdong Hu, Liqun Huang, Tao Kong, Hang Li, Yifeng Li, Yuxiao Liu, Xiao Ma, et al. Gr-3 technical report. arXiv preprint arXiv:2507.15493, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[12]
Blip3o-next: Next frontier of native image generation
Jiuhai Chen, Le Xue, Zhiyang Xu, Xichen Pan, Shusheng Yang, Can Qin, An Yan, Honglu Zhou, Zeyuan Chen, Lifu Huang, et al. Blip3o-next: Next frontier of native image generation. arXiv preprint arXiv:2510.15857, 2025 a
-
[13]
Kaiyuan Chen, Shuangyu Xie, Zehan Ma, Pannag R Sanketi, and Ken Goldberg. Robo2vlm: Visual question answering from large-scale in-the-wild robot manipulation datasets. arXiv preprint arXiv:2505.15517, 2025 b
-
[14]
Diffusion policy: Visuomotor policy learning via action diffusion
Cheng Chi, Zhenjia Xu, Siyuan Feng, Eric Cousineau, Yilun Du, Benjamin Burchfiel, Russ Tedrake, and Shuran Song. Diffusion policy: Visuomotor policy learning via action diffusion. The International Journal of Robotics Research, 44 0 (10-11): 0 1684--1704, 2025
2025
-
[15]
Gheorghe Comanici, Eric Bieber, Mike Schaekermann, Ice Pasupat, Noveen Sachdeva, Inderjit Dhillon, Marcel Blistein, Ori Ram, Dan Zhang, Evan Rosen, et al. Gemini 2.5: Pushing the frontier with advanced reasoning, multimodality, long context, and next generation agentic capabilities. arXiv preprint arXiv:2507.06261, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[16]
Scannet: Richly-annotated 3d reconstructions of indoor scenes
Angela Dai, Angel X Chang, Manolis Savva, Maciej Halber, Thomas Funkhouser, and Matthias Nie ner. Scannet: Richly-annotated 3d reconstructions of indoor scenes. In Proceedings of the IEEE conference on computer vision and pattern recognition, pages 5828--5839, 2017
2017
-
[17]
arXiv preprint arXiv:2602.14979 (2026)
Ronghao Dang, Jiayan Guo, Bohan Hou, Sicong Leng, Kehan Li, Xin Li, Jiangpin Liu, Yunxuan Mao, Zhikai Wang, Yuqian Yuan, et al. Rynnbrain: Open embodied foundation models. arXiv preprint arXiv:2602.14979, 2026
-
[18]
Embspatial-bench: Benchmarking spatial understanding for embodied tasks with large vision-language models
Mengfei Du, Binhao Wu, Zejun Li, Xuan-Jing Huang, and Zhongyu Wei. Embspatial-bench: Benchmarking spatial understanding for embodied tasks with large vision-language models. In Proceedings of the 62nd Annual Meeting of the Association for Computational Linguistics (Volume 2: Short Papers), pages 346--355, 2024
2024
-
[19]
VLM-3R: Vision-Language Models Augmented with Instruction-Aligned 3D Reconstruction
Zhiwen Fan, Jian Zhang, Renjie Li, Junge Zhang, Runjin Chen, Hezhen Hu, Kevin Wang, Huaizhi Qu, Dilin Wang, Zhicheng Yan, et al. Vlm-3r: Vision-language models augmented with instruction-aligned 3d reconstruction. arXiv preprint arXiv:2505.20279, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[20]
Visuospatial cognitive assistant
Qi Feng. Visuospatial cognitive assistant. arXiv preprint arXiv:2505.12312, 2025
-
[21]
Xiaoshuai Hao, Yingbo Tang, Lingfeng Zhang, Yanbiao Ma, Yunfeng Diao, Ziyu Jia, Wenbo Ding, Hangjun Ye, and Long Chen. Roboafford++: A generative ai-enhanced dataset for multimodal affordance learning in robotic manipulation and navigation. arXiv preprint arXiv:2511.12436, 2025 a
-
[22]
MiMo-Embodied: X-Embodied Foundation Model Technical Report
Xiaoshuai Hao, Lei Zhou, Zhijian Huang, Zhiwen Hou, Yingbo Tang, Lingfeng Zhang, Guang Li, Zheng Lu, Shuhuai Ren, Xianhui Meng, et al. Mimo-embodied: X-embodied foundation model technical report. arXiv preprint arXiv:2511.16518, 2025 b
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[23]
Video Prediction Policy: A Generalist Robot Policy with Predictive Visual Representations
Yucheng Hu, Yanjiang Guo, Pengchao Wang, Xiaoyu Chen, Yen-Jen Wang, Jianke Zhang, Koushil Sreenath, Chaochao Lu, and Jianyu Chen. Video prediction policy: A generalist robot policy with predictive visual representations. arXiv preprint arXiv:2412.14803, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[24]
ThinkAct: Vision-Language-Action Reasoning via Reinforced Visual Latent Planning
Chi-Pin Huang, Yueh-Hua Wu, Min-Hung Chen, Yu-Chiang Frank Wang, and Fu-En Yang. Thinkact: Vision-language-action reasoning via reinforced visual latent planning. arXiv preprint arXiv:2507.16815, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[25]
Aaron Hurst, Adam Lerer, Adam P Goucher, Adam Perelman, Aditya Ramesh, Aidan Clark, AJ Ostrow, Akila Welihinda, Alan Hayes, Alec Radford, et al. Gpt-4o system card. arXiv preprint arXiv:2410.21276, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[27]
$\pi_{0.5}$: a Vision-Language-Action Model with Open-World Generalization
Physical Intelligence, Kevin Black, Noah Brown, James Darpinian, Karan Dhabalia, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, et al. _0 : a vision-language-action model with open-world generalization. arXiv preprint arXiv:2504.16054, 2025 b
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[28]
Robobrain: A unified brain model for robotic manipulation from abstract to concrete
Yuheng Ji, Huajie Tan, Jiayu Shi, Xiaoshuai Hao, Yuan Zhang, Hengyuan Zhang, Pengwei Wang, Mengdi Zhao, Yao Mu, Pengju An, et al. Robobrain: A unified brain model for robotic manipulation from abstract to concrete. arXiv preprint arXiv:2502.21257, 2025
-
[29]
arXiv preprint arXiv:2509.15212 (2025)
Yuming Jiang, Siteng Huang, Shengke Xue, Yaxi Zhao, Jun Cen, Sicong Leng, Kehan Li, Jiayan Guo, Kexiang Wang, Mingxiu Chen, et al. Rynnvla-001: Using human demonstrations to improve robot manipulation. arXiv preprint arXiv:2509.15212, 2025
-
[30]
Cotracker3: Simpler and better point tracking by pseudo-labelling real videos
Nikita Karaev, Yuri Makarov, Jianyuan Wang, Natalia Neverova, Andrea Vedaldi, and Christian Rupprecht. Cotracker3: Simpler and better point tracking by pseudo-labelling real videos. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pages 6013--6022, 2025
2025
-
[31]
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Alexander Khazatsky, Karl Pertsch, Suraj Nair, Ashwin Balakrishna, Sudeep Dasari, Siddharth Karamcheti, Soroush Nasiriany, Mohan Kumar Srirama, Lawrence Yunliang Chen, Kirsty Ellis, et al. Droid: A large-scale in-the-wild robot manipulation dataset. arXiv preprint arXiv:2403.12945, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[32]
OpenVLA: An Open-Source Vision-Language-Action Model
Moo Jin Kim, Karl Pertsch, Siddharth Karamcheti, Ted Xiao, Ashwin Balakrishna, Suraj Nair, Rafael Rafailov, Ethan Foster, Grace Lam, Pannag Sanketi, et al. Openvla: An open-source vision-language-action model. arXiv preprint arXiv:2406.09246, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[34]
MolmoAct: Action Reasoning Models that can Reason in Space
Jason Lee, Jiafei Duan, Haoquan Fang, Yuquan Deng, Shuo Liu, Boyang Li, Bohan Fang, Jieyu Zhang, Yi Ru Wang, Sangho Lee, et al. Molmoact: Action reasoning models that can reason in space. arXiv preprint arXiv:2508.07917, 2025 b
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[35]
LLaVA-OneVision: Easy Visual Task Transfer
Bo Li, Yuanhan Zhang, Dong Guo, Renrui Zhang, Feng Li, Hao Zhang, Kaichen Zhang, Peiyuan Zhang, Yanwei Li, Ziwei Liu, et al. Llava-onevision: Easy visual task transfer. arXiv preprint arXiv:2408.03326, 2024 a
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[36]
Pointvla: Injecting the 3d world into vision-language-action models
Chengmeng Li, Junjie Wen, Yaxin Peng, Yan Peng, and Yichen Zhu. Pointvla: Injecting the 3d world into vision-language-action models. IEEE Robotics and Automation Letters, 11 0 (3): 0 2506--2513, 2026
2026
-
[37]
arXiv preprint arXiv:2510.12276 , year=
Fuhao Li, Wenxuan Song, Han Zhao, Jingbo Wang, Pengxiang Ding, Donglin Wang, Long Zeng, and Haoang Li. Spatial forcing: Implicit spatial representation alignment for vision-language-action model. arXiv preprint arXiv:2510.12276, 2025 a
-
[38]
3ds-vla: A 3d spatial-aware vision language action model for robust multi-task manipulation
Xiaoqi Li, Liang Heng, Jiaming Liu, Yan Shen, Chenyang Gu, Zhuoyang Liu, Hao Chen, Nuowei Han, Renrui Zhang, Hao Tang, et al. 3ds-vla: A 3d spatial-aware vision language action model for robust multi-task manipulation. In 9th Annual Conference on Robot Learning, 2025 b
2025
-
[39]
Vision-Language Foundation Models as Effective Robot Imitators
Xinghang Li, Minghuan Liu, Hanbo Zhang, Cunjun Yu, Jie Xu, Hongtao Wu, Chilam Cheang, Ya Jing, Weinan Zhang, Huaping Liu, et al. Vision-language foundation models as effective robot imitators. arXiv preprint arXiv:2311.01378, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[40]
Evaluating Real-World Robot Manipulation Policies in Simulation
Xuanlin Li, Kyle Hsu, Jiayuan Gu, Karl Pertsch, Oier Mees, Homer Rich Walke, Chuyuan Fu, Ishikaa Lunawat, Isabel Sieh, Sean Kirmani, et al. Evaluating real-world robot manipulation policies in simulation. arXiv preprint arXiv:2405.05941, 2024 b
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[41]
Genie Envisioner: A Unified World Foundation Platform for Robotic Manipulation
Yue Liao, Pengfei Zhou, Siyuan Huang, Donglin Yang, Shengcong Chen, Yuxin Jiang, Yue Hu, Jingbin Cai, Si Liu, Jianlan Luo, et al. Genie envisioner: A unified world foundation platform for robotic manipulation. arXiv preprint arXiv:2508.05635, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[42]
Depth Anything 3: Recovering the Visual Space from Any Views
Haotong Lin, Sili Chen, Junhao Liew, Donny Y Chen, Zhenyu Li, Guang Shi, Jiashi Feng, and Bingyi Kang. Depth anything 3: Recovering the visual space from any views. arXiv preprint arXiv:2511.10647, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[43]
Flow Matching for Generative Modeling
Yaron Lipman, Ricky TQ Chen, Heli Ben-Hamu, Maximilian Nickel, and Matt Le. Flow matching for generative modeling. arXiv preprint arXiv:2210.02747, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[44]
Libero: Benchmarking knowledge transfer for lifelong robot learning
Bo Liu, Yifeng Zhu, Chongkai Gao, Yihao Feng, Qiang Liu, Yuke Zhu, and Peter Stone. Libero: Benchmarking knowledge transfer for lifelong robot learning. Advances in Neural Information Processing Systems, 36: 0 44776--44791, 2023 a
2023
-
[45]
Visual instruction tuning
Haotian Liu, Chunyuan Li, Qingyang Wu, and Yong Jae Lee. Visual instruction tuning. Advances in neural information processing systems, 36: 0 34892--34916, 2023 b
2023
-
[46]
Towards generalist robot policies: What matters in building vision-language-action models
Huaping Liu, Xinghang Li, Peiyan Li, Minghuan Liu, Dong Wang, Jirong Liu, Bingyi Kang, Xiao Ma, Tao Kong, and Hanbo Zhang. Towards generalist robot policies: What matters in building vision-language-action models. 2025 a
2025
-
[47]
HybridVLA: Collaborative Diffusion and Autoregression in a Unified Vision-Language-Action Model
Jiaming Liu, Hao Chen, Pengju An, Zhuoyang Liu, Renrui Zhang, Chenyang Gu, Xiaoqi Li, Ziyu Guo, Sixiang Chen, Mengzhen Liu, et al. Hybridvla: Collaborative diffusion and autoregression in a unified vision-language-action model. arXiv preprint arXiv:2503.10631, 2025 b
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[48]
Rdt2: Exploring the scaling limit of umi data towards zero-shot cross-embodiment generalization
Songming Liu, Bangguo Li, Kai Ma, Lingxuan Wu, Hengkai Tan, Xiao Ouyang, Hang Su, and Jun Zhu. Rdt2: Exploring the scaling limit of umi data towards zero-shot cross-embodiment generalization. arXiv preprint arXiv:2602.03310, 2026
-
[49]
Vl-grasp: a 6-dof interactive grasp policy for language-oriented objects in cluttered indoor scenes
Yuhao Lu, Yixuan Fan, Beixing Deng, Fangfu Liu, Yali Li, and Shengjin Wang. Vl-grasp: a 6-dof interactive grasp policy for language-oriented objects in cluttered indoor scenes. In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 976--983. IEEE, 2023
2023
-
[50]
Visual embodied brain: Let multimodal large language models see, think, and control in spaces
Gen Luo, Ganlin Yang, Ziyang Gong, Guanzhou Chen, Haonan Duan, Erfei Cui, Ronglei Tong, Zhi Hou, Tianyi Zhang, Zhe Chen, et al. Visual embodied brain: Let multimodal large language models see, think, and control in spaces. arXiv preprint arXiv:2506.00123, 2025
-
[51]
F1: A Vision-Language-Action Model Bridging Understanding and Generation to Actions
Qi Lv, Weijie Kong, Hao Li, Jia Zeng, Zherui Qiu, Delin Qu, Haoming Song, Qizhi Chen, Xiang Deng, and Jiangmiao Pang. F1: A vision-language-action model bridging understanding and generation to actions. arXiv preprint arXiv:2509.06951, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[52]
SpaceR: Reinforcing MLLMs in Video Spatial Reasoning
Kun Ouyang, Yuanxin Liu, Haoning Wu, Yi Liu, Hao Zhou, Jie Zhou, Fandong Meng, and Xu Sun. Spacer: Reinforcing mllms in video spatial reasoning. arXiv preprint arXiv:2504.01805, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[53]
Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration 0
Abby O’Neill, Abdul Rehman, Abhiram Maddukuri, Abhishek Gupta, Abhishek Padalkar, Abraham Lee, Acorn Pooley, Agrim Gupta, Ajay Mandlekar, Ajinkya Jain, et al. Open x-embodiment: Robotic learning datasets and rt-x models: Open x-embodiment collaboration 0. In 2024 IEEE International Conference on Robotics and Automation (ICRA), pages 6892--6903. IEEE, 2024
2024
-
[54]
Scalable diffusion models with transformers
William Peebles and Saining Xie. Scalable diffusion models with transformers. In Proceedings of the IEEE/CVF international conference on computer vision, pages 4195--4205, 2023
2023
-
[55]
FAST: Efficient Action Tokenization for Vision-Language-Action Models
Karl Pertsch, Kyle Stachowicz, Brian Ichter, Danny Driess, Suraj Nair, Quan Vuong, Oier Mees, Chelsea Finn, and Sergey Levine. Fast: Efficient action tokenization for vision-language-action models. arXiv preprint arXiv:2501.09747, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[57]
Delin Qu, Haoming Song, Qizhi Chen, Zhaoqing Chen, Xianqiang Gao, Xinyi Ye, Qi Lv, Modi Shi, Guanghui Ren, Cheng Ruan, et al. Eo-1: Interleaved vision-text-action pretraining for general robot control. arXiv preprint arXiv:2508.21112, 2025 b
-
[58]
SpatialVLA: Exploring Spatial Representations for Visual-Language-Action Model
Delin Qu, Haoming Song, Qizhi Chen, Yuanqi Yao, Xinyi Ye, Yan Ding, Zhigang Wang, JiaYuan Gu, Bin Zhao, Dong Wang, et al. Spatialvla: Exploring spatial representations for visual-language-action model. arXiv preprint arXiv:2501.15830, 2025 c
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[59]
Paco: Parts and attributes of common objects
Vignesh Ramanathan, Anmol Kalia, Vladan Petrovic, Yi Wen, Baixue Zheng, Baishan Guo, Rui Wang, Aaron Marquez, Rama Kovvuri, Abhishek Kadian, et al. Paco: Parts and attributes of common objects. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 7141--7151, 2023
2023
-
[60]
Bytedance Seed. Seed1. 8 model card: Towards generalized real-world agency. Technical report, 2025a. Technical Report
-
[61]
Robovqa: Multimodal long-horizon reasoning for robotics
Pierre Sermanet, Tianli Ding, Jeffrey Zhao, Fei Xia, Debidatta Dwibedi, Keerthana Gopalakrishnan, Christine Chan, Gabriel Dulac-Arnold, Sharath Maddineni, Nikhil J Joshi, et al. Robovqa: Multimodal long-horizon reasoning for robotics. In 2024 IEEE International Conference on Robotics and Automation (ICRA), pages 645--652. IEEE, 2024
2024
-
[62]
DeepSeekMath: Pushing the Limits of Mathematical Reasoning in Open Language Models
Zhihong Shao, Peiyi Wang, Qihao Zhu, Runxin Xu, Junxiao Song, Xiao Bi, Haowei Zhang, Mingchuan Zhang, YK Li, Yang Wu, et al. Deepseekmath: Pushing the limits of mathematical reasoning in open language models. arXiv preprint arXiv:2402.03300, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[63]
Robospatial: Teaching spatial understanding to 2d and 3d vision-language models for robotics
Chan Hee Song, Valts Blukis, Jonathan Tremblay, Stephen Tyree, Yu Su, and Stan Birchfield. Robospatial: Teaching spatial understanding to 2d and 3d vision-language models for robotics. In Proceedings of the Computer Vision and Pattern Recognition Conference, pages 15768--15780, 2025 a
2025
-
[64]
Reconvla: Reconstructive vision-language-action model as effective robot perceiver
Wenxuan Song, Ziyang Zhou, Han Zhao, Jiayi Chen, Pengxiang Ding, Haodong Yan, Yuxin Huang, Feilong Tang, Donglin Wang, and Haoang Li. Reconvla: Reconstructive vision-language-action model as effective robot perceiver. arXiv preprint arXiv:2508.10333, 2025 b
-
[65]
Starvla: A lego-like codebase for vision-language-action model developing
starVLA Contributors. Starvla: A lego-like codebase for vision-language-action model developing. GitHub repository, 1 2025. URL https://github.com/starVLA/starVLA
2025
-
[66]
Gemini Robotics: Bringing AI into the Physical World
Gemini Robotics Team, Saminda Abeyruwan, Joshua Ainslie, Jean-Baptiste Alayrac, Montserrat Gonzalez Arenas, Travis Armstrong, Ashwin Balakrishna, Robert Baruch, Maria Bauza, Michiel Blokzijl, et al. Gemini robotics: Bringing ai into the physical world. arXiv preprint arXiv:2503.20020, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[67]
Octo: An Open-Source Generalist Robot Policy
Octo Model Team, Dibya Ghosh, Homer Walke, Karl Pertsch, Kevin Black, Oier Mees, Sudeep Dasari, Joey Hejna, Tobias Kreiman, Charles Xu, et al. Octo: An open-source generalist robot policy. arXiv preprint arXiv:2405.12213, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[68]
Cambrian-1: A fully open, vision-centric exploration of multimodal llms
Peter Tong, Ellis Brown, Penghao Wu, Sanghyun Woo, Adithya Jairam Vedagiri IYER, Sai Charitha Akula, Shusheng Yang, Jihan Yang, Manoj Middepogu, Ziteng Wang, et al. Cambrian-1: A fully open, vision-centric exploration of multimodal llms. Advances in Neural Information Processing Systems, 37: 0 87310--87356, 2024
2024
-
[69]
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Weiyun Wang, Zhangwei Gao, Lixin Gu, Hengjun Pu, Long Cui, Xingguang Wei, Zhaoyang Liu, Linglin Jing, Shenglong Ye, Jie Shao, et al. Internvl3. 5: Advancing open-source multimodal models in versatility, reasoning, and efficiency. arXiv preprint arXiv:2508.18265, 2025 a
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[70]
Unified vision-language-action model.arXiv preprint arXiv:2506.19850, 2025
Yuqi Wang, Xinghang Li, Wenxuan Wang, Junbo Zhang, Yingyan Li, Yuntao Chen, Xinlong Wang, and Zhaoxiang Zhang. Unified vision-language-action model. arXiv preprint arXiv:2506.19850, 2025 b
-
[71]
Chain-of-thought prompting elicits reasoning in large language models
Jason Wei, Xuezhi Wang, Dale Schuurmans, Maarten Bosma, Fei Xia, Ed Chi, Quoc V Le, Denny Zhou, et al. Chain-of-thought prompting elicits reasoning in large language models. Advances in neural information processing systems, 35: 0 24824--24837, 2022
2022
-
[72]
Tinyvla: Towards fast, data-efficient vision-language-action models for robotic manipulation
Junjie Wen, Yichen Zhu, Jinming Li, Minjie Zhu, Zhibin Tang, Kun Wu, Zhiyuan Xu, Ning Liu, Ran Cheng, Chaomin Shen, et al. Tinyvla: Towards fast, data-efficient vision-language-action models for robotic manipulation. IEEE Robotics and Automation Letters, 2025
2025
-
[73]
OmniGen2: Towards Instruction-Aligned Multimodal Generation
Chenyuan Wu, Pengfei Zheng, Ruiran Yan, Shitao Xiao, Xin Luo, Yueze Wang, Wanli Li, Xiyan Jiang, Yexin Liu, Junjie Zhou, Ze Liu, Ziyi Xia, Chaofan Li, Haoge Deng, Jiahao Wang, Kun Luo, Bo Zhang, Defu Lian, Xinlong Wang, Zhongyuan Wang, Tiejun Huang, and Zheng Liu. Omnigen2: Exploration to advanced multimodal generation. arXiv preprint arXiv:2506.18871, 2025 a
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[74]
RoboMIND: Benchmark on Multi-embodiment Intelligence Normative Data for Robot Manipulation
Kun Wu, Chengkai Hou, Jiaming Liu, Zhengping Che, Xiaozhu Ju, Zhuqin Yang, Meng Li, Yinuo Zhao, Zhiyuan Xu, Guang Yang, et al. Robomind: Benchmark on multi-embodiment intelligence normative data for robot manipulation. arXiv preprint arXiv:2412.13877, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[75]
RoboCOIN: An Open-Sourced Bimanual Robotic Data Collection for Integrated Manipulation
Shihan Wu, Xuecheng Liu, Shaoxuan Xie, Pengwei Wang, Xinghang Li, Bowen Yang, Zhe Li, Kai Zhu, Hongyu Wu, Yiheng Liu, et al. Robocoin: An open-sourced bimanual robotic data collection for integrated manipulation. arXiv preprint arXiv:2511.17441, 2025 b
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[76]
A Pragmatic VLA Foundation Model
Wei Wu, Fan Lu, Yunnan Wang, Shuai Yang, Shi Liu, Fangjing Wang, Shuailei Ma, He Sun, Yong Wang, Zhenqi Qiu, Houlong Xiong, Ziyu Wang, Shuai Zhou, Yiyu Ren, Kejia Zhang, Hui Yu, Jingmei Zhao, Qian Zhu, Ran Cheng, Yong-Lu Li, Yongtao Huang, Xing Zhu, Yujun Shen, and Kecheng Zheng. A pragmatic vla foundation model. arXiv preprint arXiv:2601.18692v1, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[77]
HY-Embodied-0.5: Embodied Foundation Models for Real-World Agents
Tencent Robotics X and HY Vision Team. Hy-embodied-0.5: Embodied foundation models for real-world agents. arXiv preprint arXiv:2604.07430, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[78]
SANA: Efficient High-Resolution Image Synthesis with Linear Diffusion Transformers
Enze Xie, Junsong Chen, Junyu Chen, Han Cai, Haotian Tang, Yujun Lin, Zhekai Zhang, Muyang Li, Ligeng Zhu, Yao Lu, et al. Sana: Efficient high-resolution image synthesis with linear diffusion transformers. arXiv preprint arXiv:2410.10629, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[79]
An Yang, Anfeng Li, Baosong Yang, Beichen Zhang, Binyuan Hui, Bo Zheng, Bowen Yu, Chang Gao, Chengen Huang, Chenxu Lv, et al. Qwen3 technical report. arXiv preprint arXiv:2505.09388, 2025 a
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[80]
Ganlin Yang, Tianyi Zhang, Haoran Hao, Weiyun Wang, Yibin Liu, Dehui Wang, Guanzhou Chen, Zijian Cai, Junting Chen, Weijie Su, et al. Vlaser: Vision-language-action model with synergistic embodied reasoning. arXiv preprint arXiv:2510.11027, 2025 b
-
[81]
Magma: A foundation model for multimodal ai agents
Jianwei Yang, Reuben Tan, Qianhui Wu, Ruijie Zheng, Baolin Peng, Yongyuan Liang, Yu Gu, Mu Cai, Seonghyeon Ye, Joel Jang, et al. Magma: A foundation model for multimodal ai agents. In Proceedings of the computer vision and pattern recognition conference, pages 14203--14214, 2025 c
2025
-
[82]
Thinking in Space: How Multimodal Large Language Models See, Remember, and Recall Spaces
Jihan Yang, Shusheng Yang, Anjali Gupta, Rilyn Han, Li Fei-Fei, and Saining Xie. Thinking in Space: How Multimodal Large Language Models See, Remember and Recall Spaces . arXiv preprint arXiv:2412.14171, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[83]
Visual spatial tuning.arXiv preprint arXiv:2511.05491, 2025
Rui Yang, Ziyu Zhu, Yanwei Li, Jingjia Huang, Shen Yan, Siyuan Zhou, Zhe Liu, Xiangtai Li, Shuangye Li, Wenqian Wang, et al. Visual spatial tuning. arXiv preprint arXiv:2511.05491, 2025 d
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.