FACTR 2: Learning External Force Sensing for Commodity Robot Arms Improves Policy Learning
Pith reviewed 2026-06-27 09:36 UTC · model grok-4.3
The pith
A neural network trained on 10 minutes of free-motion data estimates external torques on commodity robot arms as accurately as dedicated sensors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
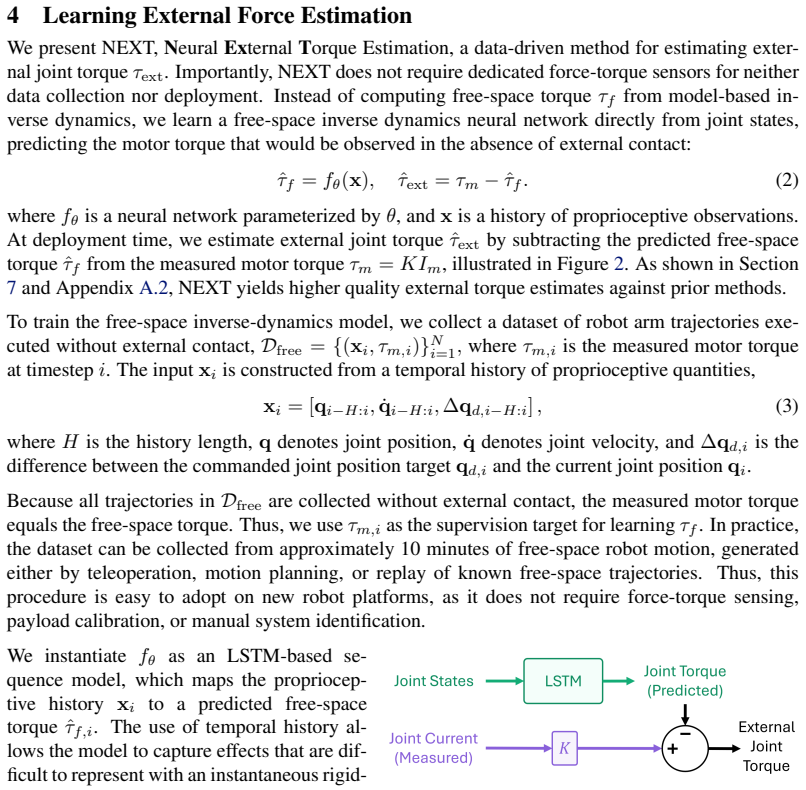
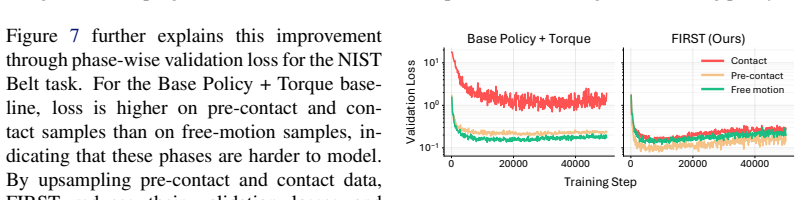
NEXT is a neural network that learns to predict external joint torques from robot state during free motion, reaching sensor-comparable accuracy after one minute of training on ten minutes of data. FIRST then uses these estimates to up-sample pre-contact and contact segments inside behavior cloning, yielding over 17 percent higher task progress than prior force-aware baselines across five long-horizon tasks. The combined system therefore supplies force awareness to off-the-shelf arms without added sensing hardware.
What carries the argument
Neural External Torque Estimation (NEXT) paired with Force-Informed Re-Sampling Training (FIRST), where NEXT supplies torque signals from free-motion data and FIRST re-weights imitation learning to emphasize contact phases.
If this is right
- Low-cost arms gain force-feedback teleoperation without added sensors.
- Behavior cloning policies improve when contact segments are up-sampled using the learned torque signal.
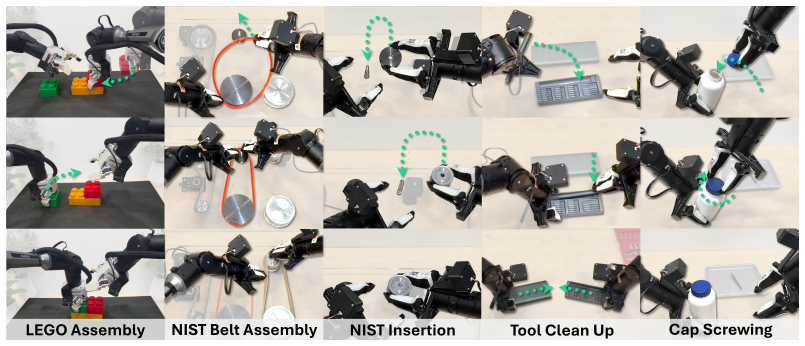
- The same hardware can now handle five different long-horizon tasks with higher completion rates.
- Force-aware manipulation becomes available on commodity platforms rather than only on research-grade arms.
Where Pith is reading between the lines
- The same free-motion training approach might extend to learning other contact signals such as slip or stiffness without dedicated hardware.
- If the method works across arm models, it could allow rapid transfer of force-sensitive skills between different low-cost platforms.
- Real-world deployment would still require checking whether torque estimates remain reliable when payloads or environments differ from the free-motion collection set.
Load-bearing premise
A network trained only on free-motion trajectories will produce accurate external torque estimates once the arm makes contact, without meaningful domain shift.
What would settle it
Measure external torques with dedicated sensors during contact-rich tasks and compare them directly to NEXT predictions; large consistent errors would show the free-motion training does not generalize.
Figures









read the original abstract
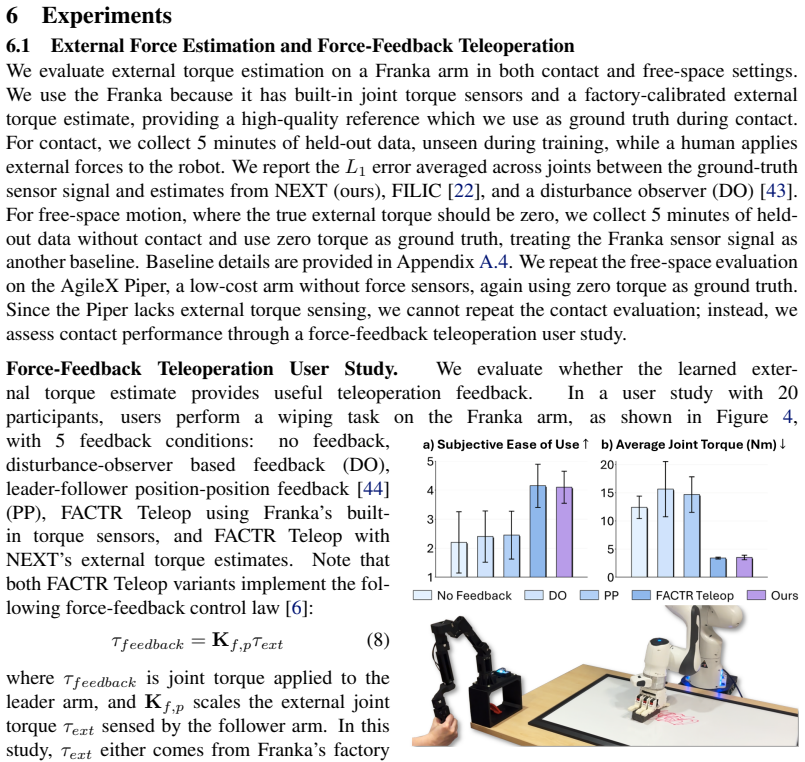
Contact-rich manipulation requires force sensitivity, but many robot arms lack dedicated force sensors due to their high cost. We present Neural External Torque Estimation (NEXT), a data-driven method that estimates external joint torques without needing any dedicated force sensors. NEXT trains in 1 minute from only 10 minutes of free-motion data, yet achieves estimates comparable to dedicated joint-torque sensors. NEXT enables force-feedback teleoperation on low-cost arms and improves policy learning through Force-Informed Re-Sampling Training (FIRST), which up-samples pre-contact and contact segments during behavior cloning. Across five long-horizon tasks, FIRST outperforms prior force-aware policies by over 17% in task progress. Together, NEXT and FIRST bring force-aware teleoperation and policy learning to off-the-shelf robots without additional sensing hardware. Video results and code are available at https://jasonjzliu.com/factr2
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents Neural External Torque Estimation (NEXT), a data-driven neural network method that estimates external joint torques on commodity robot arms after training for 1 minute on only 10 minutes of free-motion data, claiming performance comparable to dedicated joint-torque sensors. It further introduces Force-Informed Re-Sampling Training (FIRST), which uses NEXT estimates to up-sample pre-contact and contact segments during behavior cloning. Across five long-horizon tasks, FIRST is reported to outperform prior force-aware policies by over 17% in task progress. The combined approach is positioned to enable force-feedback teleoperation and improved policy learning on off-the-shelf robots without additional hardware.
Significance. If the generalization from free-motion training to contact-rich scenarios holds and the reported gains are robust, the work would be significant for the robotics community by removing the cost barrier to force sensing on commodity arms. The minimal data and training time requirements represent a practical strength that could accelerate adoption in manipulation research and applications.
major comments (2)
- [Results/Evaluation section] Results/Evaluation section: The claim that NEXT achieves estimates comparable to dedicated joint-torque sensors and enables the 17% policy improvement via FIRST is load-bearing on generalization to contact, yet the manuscript provides no quantitative error breakdown (e.g., RMSE or correlation) separating contact-rich segments from free-motion segments. This leaves the domain-shift concern unaddressed despite training occurring exclusively on free-motion data.
- [Policy learning experiments] Policy learning experiments: The assertion that FIRST outperforms prior force-aware policies by over 17% in task progress across five tasks lacks reported baseline details, statistical tests, ablation on the role of NEXT estimates, or variance across runs, making it impossible to assess whether the gain is attributable to the force estimates or other factors.
minor comments (1)
- The abstract states video and code availability at a URL, but the manuscript body should include a dedicated reproducibility section with hyperparameters, network architecture, and data collection protocol.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive feedback. The comments highlight important areas for strengthening the evaluation of generalization and the policy learning results. We address each major comment below and will incorporate revisions to provide the requested quantitative details and statistical analyses.
read point-by-point responses
-
Referee: [Results/Evaluation section] Results/Evaluation section: The claim that NEXT achieves estimates comparable to dedicated joint-torque sensors and enables the 17% policy improvement via FIRST is load-bearing on generalization to contact, yet the manuscript provides no quantitative error breakdown (e.g., RMSE or correlation) separating contact-rich segments from free-motion segments. This leaves the domain-shift concern unaddressed despite training occurring exclusively on free-motion data.
Authors: We agree that an explicit quantitative error breakdown on contact-rich versus free-motion segments would more directly address potential domain shift. While the overall comparable performance to dedicated sensors and the downstream policy improvements on contact-rich tasks provide supporting evidence, we will add a dedicated analysis in the revised Results/Evaluation section. This will include RMSE, MAE, and Pearson correlation computed separately on free-motion segments and on segments containing contacts (identified via ground-truth force thresholds from the evaluation setup). We will also report these metrics on held-out contact data collected after training. This revision will make the generalization claim more rigorous. revision: yes
-
Referee: [Policy learning experiments] Policy learning experiments: The assertion that FIRST outperforms prior force-aware policies by over 17% in task progress across five tasks lacks reported baseline details, statistical tests, ablation on the role of NEXT estimates, or variance across runs, making it impossible to assess whether the gain is attributable to the force estimates or other factors.
Authors: We acknowledge these omissions limit interpretability. In the revised manuscript we will expand the Policy learning experiments section to include: (1) explicit descriptions and citations for all baseline force-aware policies, (2) statistical significance testing (paired t-tests with p-values and effect sizes) on task progress across the five tasks, (3) a full ablation isolating the contribution of NEXT-derived force estimates within FIRST (comparing against versions using no force upsampling or alternative heuristics), and (4) mean and standard deviation of task progress over at least five independent training runs with different random seeds to report variance. These additions will clarify the source of the reported gains. revision: yes
Circularity Check
No significant circularity in empirical claims
full rationale
The paper describes a purely empirical, data-driven pipeline: NEXT is a neural network trained on 10 minutes of free-motion data to regress external torques, and FIRST is a re-sampling heuristic that uses those estimates to up-weight contact segments in behavior cloning. No derivation chain, first-principles equations, or uniqueness theorems are invoked; performance claims rest on reported training duration, hardware-sensor comparisons, and task-progress metrics across five tasks. These quantities are externally falsifiable through replication on physical robots and do not reduce to fitted parameters or self-citations by construction. The provided text contains no self-citation load-bearing steps or ansatz smuggling.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Neural networks trained on free-motion proprioceptive data can generalize to estimate external torques during physical contact.
Reference graph
Works this paper leans on
-
[1]
Gamma Force/Torque sensor.https://www.ati-ia.com/ products/ft/ft_models.aspx?id=gamma, 2026
ATI Industrial Automation. Gamma Force/Torque sensor.https://www.ati-ia.com/ products/ft/ft_models.aspx?id=gamma, 2026. Accessed: April 28, 2026
2026
-
[2]
6-Axis Force Torque Sensors for Robotics.https://www.botasys.com/ force-torque-sensors, 2024
Bota Systems. 6-Axis Force Torque Sensors for Robotics.https://www.botasys.com/ force-torque-sensors, 2024. Accessed: April 28, 2026
2024
-
[3]
H. Choi, J. E. Low, T. M. Huh, S. Hong, G. A. Uribe, K. A. Hoffmann, J. Di, T. G. Chen, A. A. Stanley, and M. R. Cutkosky. Coinft: A coin-sized, capacitive 6-axis force torque sensor for robotic applications.arXiv preprint arXiv:2503.19225, 2025
arXiv 2025
-
[4]
Bhirangi, T
R. Bhirangi, T. Hellebrekers, C. Majidi, and A. Gupta. Reskin:versatile, replaceable, lasting tactile skins. InCoRL, 2021
2021
-
[5]
M. Y . Cao, S. Laws, and F. R. y Baena. Six-axis force/torque sensors for robotics applications: A review.IEEE Sensors Journal, 21(24):27238–27251, 2021
2021
-
[6]
J. J. Liu, Y . Li, K. Shaw, T. Tao, R. Salakhutdinov, and D. Pathak. FACTR: Force-Attending Curriculum Training for Contact-Rich Policy Learning. InProceedings of Robotics: Science and Systems, LosAngeles, CA, USA, June 2025. doi:10.15607/RSS.2025.XXI.079
-
[7]
S. Oh, T. Takahashi, C. C. Beltran-Hernandez, Y . Kuroda, and M. Hamaya. A soft wrist with anisotropic and selectable stiffness for robust robot learning in contact-rich manipulation,
-
[8]
URLhttps://arxiv.org/abs/2602.14434
-
[9]
T. Buamanee, M. Kobayashi, Y . Uranishi, and H. Takemura. Bi-act: Bilateral control- based imitation learning via action chunking with transformer. In2024 IEEE Interna- tional Conference on Advanced Intelligent Mechatronics (AIM), pages 410–415, 2024. doi: 10.1109/AIM55361.2024.10637173
-
[10]
Yamane, Y
K. Yamane, Y . Li, M. Konosu, K. Inami, J. Oaki, T. Tsuji, and S. Sakaino. Design and exper- imental validation of sensorless 4-channel bilateral teleoperation for low-cost manipulators,
-
[11]
URLhttps://arxiv.org/abs/2507.06174
-
[12]
H. Shi, S. Hu, Y . Hou, W. Wang, K. Liu, and S. Song. Minimalist compliance control, 2026. URLhttps://arxiv.org/abs/2603.00913
arXiv 2026
- [13]
-
[14]
A. Zhu, Y . Tanaka, F. Rafeedi, and D. Hong. Cycloidal quasi-direct drive actuator designs with learning-based torque estimation for legged robotics. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 1–8. IEEE, 2025
2025
-
[15]
K. M. Park, J. Kim, J. Park, and F. C. Park. Learning-based real-time detection of robot collisions without joint torque sensors.IEEE Robotics and Automation Letters, 6(1):103–110,
-
[16]
doi:10.1109/LRA.2020.3033269
-
[17]
Liang and O
J. Liang and O. Kroemer. Contact localization for robot arms in motion without torque sensing. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 6322–
-
[18]
K. M. Park, Y . Park, S. Yoon, and F. C. Park. Collision detection for robot manipulators using unsupervised anomaly detection algorithms.IEEE/ASME Transactions on Mechatronics, 27 (5):2841–2851, 2022. doi:10.1109/TMECH.2021.3119057
-
[19]
Yilmaz, J
N. Yilmaz, J. Y . Wu, P. Kazanzides, and U. Tumerdem. Neural network based inverse dy- namics identification and external force estimation on the da vinci research kit. In2020 IEEE International Conference on Robotics and Automation (ICRA), pages 1387–1393. IEEE, 2020
2020
-
[20]
Zhang, H
Z. Zhang, H. Xu, Z. Yang, C. Yue, Z. Lin, H.-a. Gao, Z. Wang, and H. Zhao. Elucidating the design space of torque-aware vision-language-action models. In J. Lim, S. Song, and H.-W. Park, editors,Proceedings of The 9th Conference on Robot Learning, volume 305 of Proceedings of Machine Learning Research, pages 4019–4037. PMLR, 27–30 Sep 2025. URL https://pr...
2025
-
[21]
Kamijo, C
T. Kamijo, C. C. Beltran-Hernandez, and M. Hamaya. Learning variable compliance control from a few demonstrations for bimanual robot with haptic feedback teleoperation system. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
2024
-
[22]
J. Yu, H. Liu, Q. Yu, J. Ren, C. Hao, H. Ding, G. Huang, G. Huang, Y . Song, P. Cai, W. Zhang, and C. Lu. ForceVLA: Enhancing VLA models with a force-aware moe for contact-rich ma- nipulation. InThe Thirty-ninth Annual Conference on Neural Information Processing Systems,
-
[23]
URLhttps://openreview.net/forum?id=2845H8Ua5D
-
[24]
Z. He, H. Fang, J. Chen, H.-S. Fang, and C. Lu. Foar: Force-aware reactive policy for contact- rich robotic manipulation.IEEE Robotics and Automation Letters, 10(6):5625–5632, 2025. doi:10.1109/LRA.2025.3560871
-
[25]
W. Liu, J. Wang, Y . Wang, W. Wang, and C. Lu. Forcemimic: Force-centric imitation learning with force-motion capture system for contact-rich manipulation. In2025 IEEE International Conference on Robotics and Automation (ICRA), 2025
2025
-
[26]
H. Ge, Y . Jia, Z. Li, Y . Li, Z. Chen, R. Huang, and G. Zhou. Filic: Dual-loop force-guided imitation learning with impedance torque control for contact-rich manipulation tasks, 2025. URLhttps://arxiv.org/abs/2509.17053
Pith/arXiv arXiv 2025
-
[27]
H. Xue, J. Ren, W. Chen, G. Zhang, Y . Fang, G. Gu, H. Xu, and C. Lu. Reactive diffusion policy: Slow-fast visual-tactile policy learning for contact-rich manipulation. InProceedings of Robotics: Science and Systems (RSS), 2025
2025
-
[28]
X. B. Peng, A. Kumar, G. Zhang, and S. Levine. Advantage-weighted regression: Simple and scalable off-policy reinforcement learning.arXiv preprint arXiv:1910.00177, 2019
Pith/arXiv arXiv 1910
-
[29]
Z. Wang, A. Novikov, K. Zolna, J. T. Springenberg, S. Reed, B. Shahriari, N. Siegel, J. Merel, C. Gulcehre, N. Heess, and N. de Freitas. Critic regularized regression.Advances in Neural Information Processing Systems, 33:7768–7778, 2020. 10
2020
-
[30]
A. Nair, A. Gupta, M. Dalal, and S. Levine. Awac: Accelerating online reinforcement learning with offline datasets.arXiv preprint arXiv:2006.09359, 2020
Pith/arXiv arXiv 2006
-
[31]
S. M. Xie, H. Pham, X. Dong, N. Du, H. Liu, Y . Lu, P. S. Liang, Q. V . Le, T. Ma, and A. W. Yu. Doremi: Optimizing data mixtures speeds up language model pretraining.Advances in Neural Information Processing Systems, 36:69798–69818, 2023
2023
-
[32]
Hejna, C
J. Hejna, C. A. Bhateja, Y . Jiang, K. Pertsch, and D. Sadigh. Remix: Optimizing data mix- tures for large scale imitation learning. In P. Agrawal, O. Kroemer, and W. Burgard, ed- itors,Proceedings of The 8th Conference on Robot Learning, volume 270 ofProceedings of Machine Learning Research, pages 145–164. PMLR, 06–09 Nov 2025. URLhttps: //proceedings.ml...
2025
-
[33]
Ilyas, S
A. Ilyas, S. M. Park, L. Engstrom, G. Leclerc, and A. Madry. Datamodels: Understanding predictions with data and data with predictions. InICML, 2022
2022
-
[34]
S. Dass, A. Khaddaj, L. Engstrom, A. Madry, A. Ilyas, and R. Mart ´ın-Mart´ın. DataMIL: Selecting data for robot imitation learning with datamodels. InThe F ourteenth International Conference on Learning Representations, 2026. URLhttps://openreview.net/forum? id=AcTsKglDdh
2026
-
[35]
Hejna, S
J. Hejna, S. Mirchandani, A. Balakrishna, A. Xie, A. Wahid, J. Tompson, P. Sanketi, D. Shah, C. Devin, and D. Sadigh. Robot data curation with mutual information estimators. InRobotics: Science and Systems (RSS), 2025
2025
-
[36]
Zhang, Y
Y . Zhang, Y . Xie, H. Liu, R. Shah, M. Wan, L. Fan, and Y . Zhu. Scizor: Self-supervised data curation for large-scale imitation learning. InIEEE International Conference on Robotics and Automation (ICRA), 2026
2026
-
[37]
Y . J. Ma, J. Hejna, C. Fu, D. Shah, J. Liang, Z. Xu, S. Kirmani, P. Xu, D. Driess, T. Xiao, et al. Vision language models are in-context value learners. InThe Thirteenth International Conference on Learning Representations, 2024
2024
-
[38]
Q. Chen, J. Yu, M. Schwager, P. Abbeel, F. Shentu, and P. Wu. SARM: Stage-aware re- ward modeling for long horizon robot manipulation. InThe F ourteenth International Con- ference on Learning Representations, 2026. URLhttps://openreview.net/forum?id= aemqAxScl9
2026
-
[39]
A. S. Chen, A. M. Lessing, Y . Liu, and C. Finn. Curating demonstrations using online experi- ence. InProceedings of Robotics: Science and Systems, 2025. doi:10.15607/RSS.2025.XXI. 071
-
[40]
C. Agia, R. Sinha, J. Yang, R. Antonova, M. Pavone, H. Nishimura, M. Itkina, and J. Bohg. Cupid: Curating data your robot loves with influence functions. In J. Lim, S. Song, and H.-W. Park, editors,Proceedings of The 9th Conference on Robot Learning, volume 305 of Proceedings of Machine Learning Research, pages 2907–2932. PMLR, 27–30 Sep 2025. URL https:/...
2025
-
[41]
Jubien, M
A. Jubien, M. Gautier, and A. Janot. Dynamic identification of the kuka lwr robot using motor torques and joint torque sensors data. In19th IF AC World Congress, 2014
2014
-
[42]
Haddadin, A
S. Haddadin, A. De Luca, and A. Albu-Sch ¨affer. Robot collisions: A survey on detection, isolation, and identification.IEEE Transactions on Robotics, 33(6):1292–1312, 2017
2017
-
[43]
Linderoth, A
M. Linderoth, A. Stolt, A. Robertsson, and R. Johansson. Robotic force estimation using motor torques and modeling of low velocity friction disturbances. In2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 3550–3556, 2013. 11
2013
-
[44]
N. M. Kircanski and A. A. Goldenberg. An experimental study of nonlinear stiffness, hystere- sis, and friction effects in robot joints with harmonic drives and torque sensors.The Interna- tional Journal of Robotics Research, 16(2):214–239, 1997
1997
-
[45]
Reuss, N
M. Reuss, N. van Duijkeren, R. Krug, P. Becker, V . Shaj, and G. Neumann. End-to-end learning of hybrid inverse dynamics models for precise and compliant impedance control. InRobotics: Science and Systems, 2022
2022
-
[46]
X. Liu, C. Gong, and qiang liu. Flow straight and fast: Learning to generate and transfer data with rectified flow. InThe Eleventh International Conference on Learning Representations,
-
[47]
URLhttps://openreview.net/forum?id=XVjTT1nw5z
-
[48]
Mamedov and S
S. Mamedov and S. Mikhel. Practical aspects of model-based collision detection.Frontiers in Robotics and AI, 7:571574, 2020
2020
-
[49]
P. F. Hokayem and M. W. Spong. Bilateral teleoperation: An historical survey.Au- tomatica, 42(12):2035–2057, 2006. ISSN 0005-1098. doi:https://doi.org/10.1016/j. automatica.2006.06.027. URLhttps://www.sciencedirect.com/science/article/ pii/S0005109806002871
work page doi:10.1016/j 2035
-
[50]
M. Reuss, ¨O. E. Ya˘gmurlu, F. Wenzel, and R. Lioutikov. Multimodal diffusion transformer: Learning versatile behavior from multimodal goals. InProceedings of Robotics: Science and Systems, Delft, Netherlands, July 2024. doi:10.15607/RSS.2024.XX.121
-
[51]
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn. Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware. InProceedings of Robotics: Science and Systems, Daegu, Republic of Korea, July 2023. doi:10.15607/RSS.2023.XIX.016
-
[52]
C. Gaz, M. Cognetti, A. Oliva, P. Robuffo Giordano, and A. De Luca. Dynamic identifi- cation of the franka emika panda robot with retrieval of feasible parameters using penalty- based optimization.IEEE Robotics and Automation Letters, 4(4):4147–4154, 2019. doi: 10.1109/LRA.2019.2931248
-
[53]
agx arm urdf: Agilex robot arm urdf models.https://github.com/ agilexrobotics/agx_arm_urdf, 2026
AgileX Robotics. agx arm urdf: Agilex robot arm urdf models.https://github.com/ agilexrobotics/agx_arm_urdf, 2026. Accessed: 2026-05-11
2026
-
[54]
P. Wu, Y . Shentu, Z. Yi, X. Lin, and P. Abbeel. GELLO: A general, low-cost, and intuitive teleoperation framework for robot manipulators. In2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 12156–12163. IEEE, 2024. doi:10.1109/ IROS58592.2024.10801581
arXiv 2024
-
[55]
O. Sim ´eoni, H. V . V o, M. Seitzer, F. Baldassarre, M. Oquab, C. Jose, V . Khalidov, M. Szafraniec, S. Yi, M. Ramamonjisoa, et al. Dinov3.arXiv preprint arXiv:2508.10104, 2025
Pith/arXiv arXiv 2025
-
[56]
Shaw and D
K. Shaw and D. Pathak. Leap hand v2: Dexterous, low-cost anthropomorphic hybrid rigid soft hand for robot learning. In2nd Workshop on Dexterous Manipulation: Design, Perception and Control (RSS). 12 Appendix Videos of our results and code to recreate our system are available on our website athttps:// jasonjzliu.com/factr2 A NEXT Implementation Details A.1...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.