MMD-SLAM: Structure-Enhanced Multi-Meta Gaussian Distribution-Guided Visual SLAM
Pith reviewed 2026-06-26 17:16 UTC · model grok-4.3
The pith
MMD-SLAM incorporates Atlanta World structural priors into a Multi-Meta Gaussian representation to enhance visual SLAM tracking and mapping.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
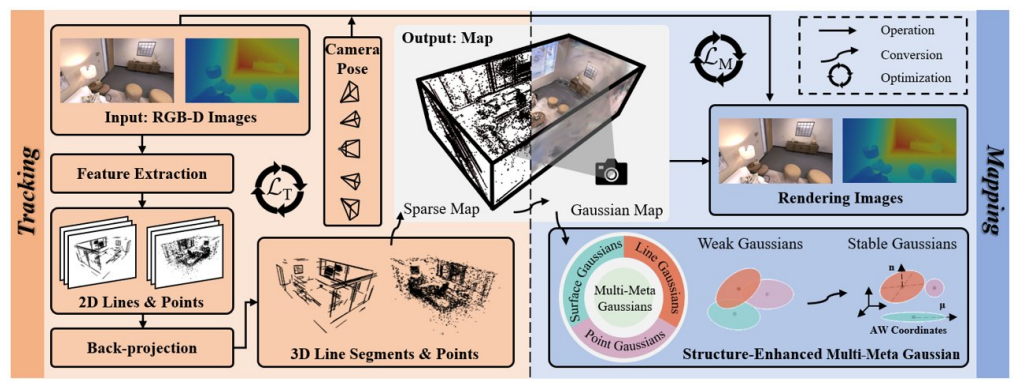
The authors claim that by guiding the Multi-Meta Gaussian distribution with the Atlanta World assumption through point-line fusion, dominant direction encoding, and Gaussian evolution, their system achieves state-of-the-art performance in both tracking accuracy and mapping quality on benchmarks like ScanNet and Replica.
What carries the argument
Multi-Meta Gaussian representation with dominant directions that encodes structural priors from the Atlanta World hypothesis for guiding photorealistic mapping and optimization.
Load-bearing premise
The Atlanta World assumption holds for the evaluated scenes and can be encoded into the Multi-Meta Gaussian representation to provide useful structural priors without introducing inconsistencies.
What would settle it
Running the system on indoor scenes that violate the Atlanta World assumption, such as those with curved surfaces or no dominant directions, and checking whether the accuracy and quality improvements over baseline Gaussian SLAM methods persist.
Figures



read the original abstract
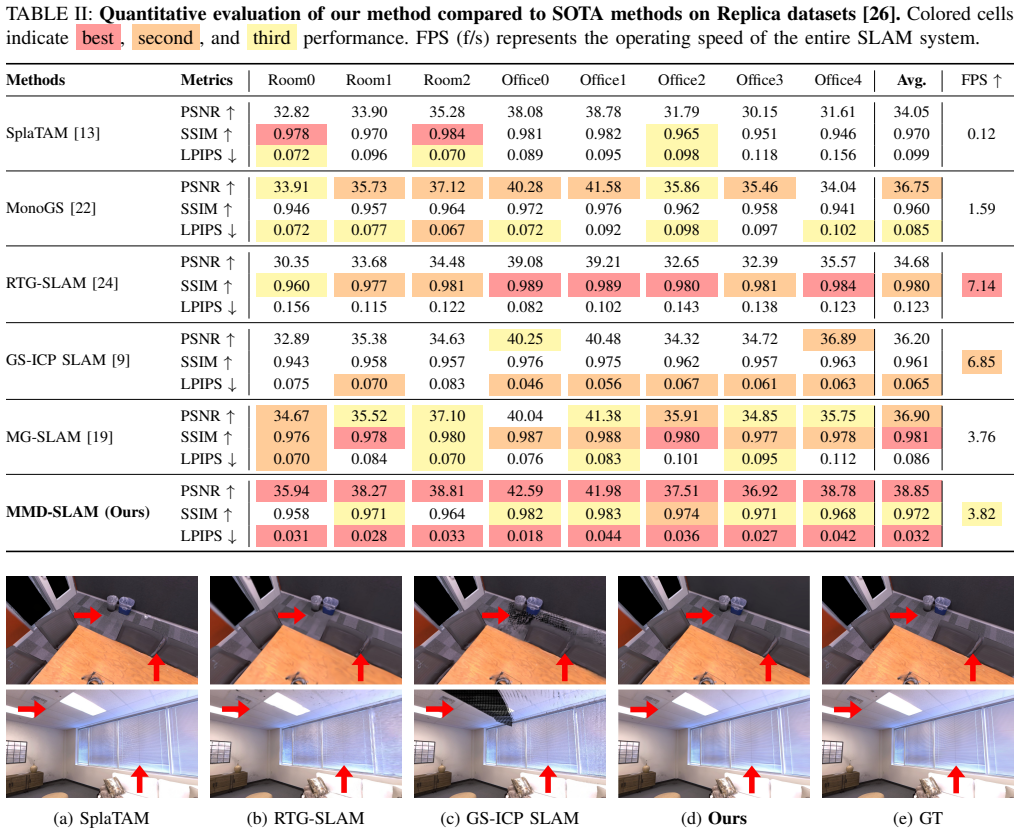
3D Gaussian Splatting (3DGS) has significantly boosted novel view synthesis and high-fidelity scene reconstruction, expanding the potential of 3DGS-based Visual Simultaneous Localization and Mapping (SLAM) methods. However, most existing systems fail to fully exploit the underlying structural information, which limits rendering quality and often leads to inconsistent maps. To address these limitations, we propose MMD-SLAM, a structure-enhanced Visual SLAM framework that leverages the Atlanta World (AW) assumption to guide a Multi-Meta Gaussian representation for photorealistic mapping. First, we introduce a point-line fusion strategy for pose optimization, where 3D line segments are incorporated to improve tracking robustness and provide additional constraints for mapping. Second, we design a Multi-Meta Gaussian representation with dominant directions, explicitly encoding structural priors from the AW hypothesis. Finally, we propose a Gaussian evolution strategy that adapts to scene geometry and incorporates structural cues into global optimization. Extensive experiments demonstrate that these innovations enable MMD-SLAM to achieve state-of-the-art performance in both tracking accuracy and mapping quality. e.g., our method achieves a 48.56% reduction in ATE RMSE on ScanNet and a 5.71% improvement in PSNR on Replica, compared with MonoGS.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes MMD-SLAM, a 3D Gaussian Splatting-based visual SLAM system that incorporates the Atlanta World (AW) assumption into a Multi-Meta Gaussian representation. It introduces a point-line fusion strategy for pose optimization, encodes structural priors via dominant directions in the Gaussian model, and uses a Gaussian evolution strategy for global optimization, claiming state-of-the-art results including a 48.56% reduction in ATE RMSE on ScanNet and 5.71% PSNR improvement on Replica relative to MonoGS.
Significance. If the reported gains are attributable to the AW-guided structural priors rather than ancillary components, the work could meaningfully advance consistency and accuracy in structured indoor SLAM by bridging geometric assumptions with neural rendering representations. The point-line fusion and adaptive evolution ideas are potentially reusable beyond this specific formulation.
major comments (2)
- [Abstract] The central attribution of performance gains to the AW priors requires verification that ScanNet and Replica scenes conform to the three mutually orthogonal dominant directions; the manuscript provides no quantitative check (e.g., measured angular deviation or orthogonality error) on the test data. Without this, it remains possible that the priors introduce inconsistencies rather than constraints, undermining the claim that the Multi-Meta Gaussian representation supplies useful structure enhancement.
- [Experiments] No ablation isolating the AW-encoded dominant directions from the point-line fusion strategy or the Gaussian evolution component is reported. Consequently the 48.56% ATE and 5.71% PSNR figures cannot be confidently ascribed to the structure-enhancement mechanism that constitutes the paper's primary contribution.
minor comments (1)
- [Abstract] The abstract refers to 'extensive experiments' but supplies no dataset splits, sequence counts, or statistical significance measures for the reported metrics.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below and will revise the manuscript accordingly to strengthen the validation of our claims.
read point-by-point responses
-
Referee: [Abstract] The central attribution of performance gains to the AW priors requires verification that ScanNet and Replica scenes conform to the three mutually orthogonal dominant directions; the manuscript provides no quantitative check (e.g., measured angular deviation or orthogonality error) on the test data. Without this, it remains possible that the priors introduce inconsistencies rather than constraints, undermining the claim that the Multi-Meta Gaussian representation supplies useful structure enhancement.
Authors: We acknowledge that the manuscript does not include a quantitative verification of how well the ScanNet and Replica scenes conform to the Atlanta World assumption. Although the AW model is a standard prior for indoor man-made environments, we agree that reporting measured angular deviations or orthogonality errors would provide stronger support for attributing gains to the structural priors. In the revision we will add this analysis, computing and tabulating the average angular deviation from orthogonality for the dominant directions extracted across the test sequences. revision: yes
-
Referee: [Experiments] No ablation isolating the AW-encoded dominant directions from the point-line fusion strategy or the Gaussian evolution component is reported. Consequently the 48.56% ATE and 5.71% PSNR figures cannot be confidently ascribed to the structure-enhancement mechanism that constitutes the paper's primary contribution.
Authors: We agree that the current experiments do not isolate the AW-encoded dominant directions from the point-line fusion and Gaussian evolution components, making it difficult to attribute the reported gains specifically to the structure-enhancement mechanism. We will add dedicated ablation studies in the revised manuscript that disable the AW priors while retaining the other modules, thereby quantifying the incremental contribution of the Multi-Meta Gaussian structural encoding to tracking and rendering metrics. revision: yes
Circularity Check
No circularity detected; empirical claims rest on independent experiments
full rationale
The provided abstract and description introduce a new Multi-Meta Gaussian representation guided by the Atlanta World assumption, a point-line fusion strategy, and a Gaussian evolution strategy. These are presented as novel design choices whose value is demonstrated via empirical comparisons (ATE RMSE on ScanNet, PSNR on Replica) against external baselines such as MonoGS. No equations, fitted parameters renamed as predictions, self-definitional loops, or load-bearing self-citations appear in the text. The AW assumption is invoked as an external structural prior rather than derived from the method itself. The derivation chain is therefore self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Atlanta World assumption holds for the scenes and supplies usable structural priors
invented entities (1)
-
Multi-Meta Gaussian representation with dominant directions
no independent evidence
Forward citations
Cited by 2 Pith papers
-
MyGO-Splat: Multi-Objective Closed-Loop Geometric Feedback for RGB-Only Gaussian SLAM
MyGO-Splat is a closed-loop RGB-only Gaussian SLAM system that rasterizes depth and normals from the map to supervise pose optimization and align monocular depth priors for scale consistency.
-
PanoImager: Geometry-Guided Novel View Synthesis and Reconstruction from Sparse Panoramic Views
PanoImager is an SfM-free pipeline combining feed-forward priors, geometry-conditioned diffusion view completion, and depth-guided 3DGS optimization to reconstruct from sparse panoramic images.
Reference graph
Works this paper leans on
-
[1]
Edlines: A real-time line segment detector with a false detection control,
C. Akinlar and C. Topal, “Edlines: A real-time line segment detector with a false detection control,”Pattern Recognition Letters, vol. 32, no. 13, pp. 1633–1642, 2011
2011
-
[2]
Orb-slam3: An accurate open-source library for visual, visual-inertial, and multimap slam,
C. Campos, R. Elvira, J. J. G. Rodriguez, J. M. M. Montiel, and J. D. Tardos, “Orb-slam3: An accurate open-source library for visual, visual-inertial, and multimap slam,”IEEE Transactions on Robotics, vol. 37, no. 6, pp. 1874–1890, 2021
2021
-
[3]
SAGE: Spatial-visual adaptive graph exploration for efficient visual place recognition,
S. Chen, C. Wang, R. Xu, Peixingtian, yukun Song, J. Lin, W. Xu, jingyizhang, L. Guo, and S. Xu, “SAGE: Spatial-visual adaptive graph exploration for efficient visual place recognition,” inThe Fourteenth International Conference on Learning Representations, 2026
2026
-
[4]
Orbeez-slam: A real-time monocular visual slam with orb features and nerf-realized mapping,
C.-M. Chung, Y .-C. Tseng, Y .-C. Hsu, X.-Q. Shi, Y .-H. Hua, J.-F. Yeh, W.-C. Chen, Y .-T. Chen, and W. H. Hsu, “Orbeez-slam: A real-time monocular visual slam with orb features and nerf-realized mapping,” in2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, Conference Proceedings, pp. 9400–9406
2023
-
[5]
Scannet: Richly-annotated 3d reconstructions of indoor scenes,
A. Dai, A. X. Chang, M. Savva, M. Halber, T. Funkhouser, and M. Nießner, “Scannet: Richly-annotated 3d reconstructions of indoor scenes,” inProceedings of the IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition (CVPR), 2017, Conference Proceedings, pp. 5828–5839
2017
-
[6]
Bundle- fusion: Real-time globally consistent 3d reconstruction using on-the- fly surface reintegration,
A. Dai, M. Nießner, M. Zollh ¨ofer, S. Izadi, and C. Theobalt, “Bundle- fusion: Real-time globally consistent 3d reconstruction using on-the- fly surface reintegration,”ACM Transactions on Graphics, vol. 36, no. 4, p. 1, 2017
2017
-
[7]
Plvs: A slam system with points, lines, volumetric mapping, and 3d incremental segmentation,
L. Freda, “Plvs: A slam system with points, lines, volumetric mapping, and 3d incremental segmentation,”arXiv preprint arXiv:2309.10896, 2023
-
[8]
Hs- slam: Hybrid representation with structural supervision for improved dense slam,
Z. Gong, F. Tosi, Y . Zhang, S. Mattoccia, and M. Poggi, “Hs- slam: Hybrid representation with structural supervision for improved dense slam,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 8464–8470
2025
-
[9]
Rgbd gs-icp slam,
S. Ha, J. Yeon, and H. Yu, “Rgbd gs-icp slam,” inProceedings of the European Conference on Computer Vision (ECCV). Springer, 2024, pp. 180–197
2024
-
[10]
2d gaussian splat- ting for geometrically accurate radiance fields,
B. Huang, Z. Yu, A. Chen, A. Geiger, and S. Gao, “2d gaussian splat- ting for geometrically accurate radiance fields,” inACM SIGGRAPH, 2024, Conference Proceedings, pp. 1–11
2024
-
[11]
Photo-slam: Real-time simultaneous localization and photorealistic mapping for monocular stereo and rgb-d cameras,
H. Huang, L. Li, H. Cheng, and S.-K. Yeung, “Photo-slam: Real-time simultaneous localization and photorealistic mapping for monocular stereo and rgb-d cameras,” inProceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition (CVPR), 2024, Conference Proceedings, pp. 21 584–21 593
2024
-
[12]
Di-fusion: Online implicit 3d reconstruction with deep priors,
J. Huang, S. S. Huang, H. Song, and S. M. Hu, “Di-fusion: Online implicit 3d reconstruction with deep priors,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2021, Conference Proceedings, pp. 8928–8937
2021
-
[13]
Splatam: Splat track & map 3d gaussians for dense rgb-d slam,
N. Keetha, J. Karhade, K. M. Jatavallabhula, G. Yang, S. Scherer, D. Ramanan, and J. Luiten, “Splatam: Splat track & map 3d gaussians for dense rgb-d slam,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024, Conference Proceedings, pp. 21 357–21 366
2024
-
[14]
3d gaussian splatting for real-time radiance field rendering,
B. Kerbl, G. Kopanas, T. Leimk ¨uhler, and G. Drettakis, “3d gaussian splatting for real-time radiance field rendering,”ACM Transactions on Graphics, vol. 42, no. 4, pp. 1–14, 2023
2023
-
[15]
Garad-slam: 3d gaussian splatting for real-time anti dynamic slam,
M. Li, W. Chen, N. Cheng, J. Xu, D. Li, and H. Wang, “Garad-slam: 3d gaussian splatting for real-time anti dynamic slam,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 11 047–11 053
2025
-
[16]
Slam- x: Generalizable dynamic removal for nerf and gaussian splatting slam,
M. Li, D. Li, S. Hu, K. Wang, Z. Zhao, and H. Wang, “Slam- x: Generalizable dynamic removal for nerf and gaussian splatting slam,” inProceedings of the 33rd ACM International Conference on Multimedia, 2025, pp. 1132–1140
2025
-
[17]
Sgs-slam: Semantic gaussian splatting for neural dense slam,
M. Li, S. Liu, H. Zhou, G. Zhu, N. Cheng, T. Deng, and H. Wang, “Sgs-slam: Semantic gaussian splatting for neural dense slam,” in Proceedings of the European Conference on Computer Vision (ECCV). Springer, 2024, pp. 163–179
2024
-
[18]
Convex relaxation for robust vanishing point estimation in manhattan world,
B. Liao, Z. Zhao, H. Li, Y . Zhou, Y . Zeng, H. Li, and P. Liu, “Convex relaxation for robust vanishing point estimation in manhattan world,” inProceedings of the Computer Vision and Pattern Recognition Conference, 2025, pp. 15 823–15 832
2025
-
[19]
Mg-slam: Structure gaussian splatting slam with manhattan world hy- pothesis,
S. Liu, T. Deng, H. Zhou, L. Li, H. Wang, D. Wang, and M. Li, “Mg-slam: Structure gaussian splatting slam with manhattan world hy- pothesis,”IEEE Transactions on Automation Science and Engineering, vol. 22, pp. 17 034–17 049, 2025
2025
-
[20]
Aligning cyber space with physical world: A comprehensive survey on embodied ai,
Y . Liu, W. Chen, Y . Bai, X. Liang, G. Li, W. Gao, and L. Lin, “Aligning cyber space with physical world: A comprehensive survey on embodied ai,”IEEE/ASME Transactions on Mechatronics, 2025
2025
-
[21]
Ngel-slam: Neural implicit representation-based global consistent low-latency slam system,
Y . Mao, X. Yu, Z. Zhang, K. Wang, Y . Wang, R. Xiong, and Y . Liao, “Ngel-slam: Neural implicit representation-based global consistent low-latency slam system,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 6952–6958
2024
-
[22]
Gaussian splatting slam,
H. Matsuki, R. Murai, P. H. Kelly, and A. J. Davison, “Gaussian splatting slam,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024, Conference Proceedings, pp. 18 039–18 048
2024
-
[23]
Nerf: Representing scenes as neural radiance fields for view synthesis,
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoor- thi, and R. Ng, “Nerf: Representing scenes as neural radiance fields for view synthesis,”Communications of the ACM, vol. 65, no. 1, pp. 99–106, 2022
2022
-
[24]
Rtg-slam: Real-time 3d reconstruction at scale using gaussian splat- ting,
Z. Peng, T. Shao, Y . Liu, J. Zhou, Y . Yang, J. Wang, and K. Zhou, “Rtg-slam: Real-time 3d reconstruction at scale using gaussian splat- ting,” inACM SIGGRAPH, 2024, Conference Proceedings, pp. 1–11
2024
-
[25]
Atlanta world: An expectation max- imization framework for simultaneous low-level edge grouping and camera calibration in complex man-made environments,
G. Schindler and F. Dellaert, “Atlanta world: An expectation max- imization framework for simultaneous low-level edge grouping and camera calibration in complex man-made environments,” inProceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). IEEE, 2004, pp. I–I
2004
-
[26]
The Replica Dataset: A Digital Replica of Indoor Spaces
J. Straub, T. Whelan, L. Ma, Y . Chen, E. Wijmans, S. Green, J. J. Engel, R. Mur-Artal, C. Ren, and S. Verma, “The replica dataset: A digital replica of indoor spaces,”arXiv preprint arXiv:1906.05797, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1906
-
[27]
A benchmark for the evaluation of rgb-d slam systems,
J. Sturm, N. Engelhard, F. Endres, W. Burgard, and D. Cremers, “A benchmark for the evaluation of rgb-d slam systems,” in2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2012, Conference Proceedings, pp. 573–580
2012
-
[28]
Imap: Implicit map- ping and positioning in real-time,
E. Sucar, S. K. Liu, J. Ortiz, and A. J. Davison, “Imap: Implicit map- ping and positioning in real-time,” inProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), 2021, Confer- ence Proceedings, pp. 6209–6218
2021
-
[29]
Focus on local: Finding reliable discriminative regions for visual place recognition,
C. Wang, S. Chen, Y . Song, R. Xu, Z. Zhang, J. Zhang, H. Yang, Y . Zhang, K. Fu, S. Du,et al., “Focus on local: Finding reliable discriminative regions for visual place recognition,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 39, no. 7, 2025, pp. 7536–7544
2025
-
[30]
Elasticfusion: Dense slam without a pose graph
T. Whelan, S. Leutenegger, R. F. Salas-Moreno, B. Glocker, and A. J. Davison, “Elasticfusion: Dense slam without a pose graph.” in Robotics: Science and Systems (RSS), vol. 11, no. 3. Rome, 2015
2015
-
[31]
An efficient and robust line segment matching approach based on lbd descriptor and pairwise geometric consistency,
L. Zhang and R. Koch, “An efficient and robust line segment matching approach based on lbd descriptor and pairwise geometric consistency,” Journal of visual communication and image representation, vol. 24, no. 7, pp. 794–805, 2013
2013
-
[32]
Balf: Simple and efficient blur aware local feature detector,
Z. Zhao, “Balf: Simple and efficient blur aware local feature detector,” inProceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2024, pp. 3362–3372
2024
-
[33]
Advances in global solvers for 3d vision,
Z. Zhao, H. Yang, B. Liao, Y . Zeng, S. Yan, Y . Gu, P. Liu, Y . Zhou, H. Li, and J. Civera, “Advances in global solvers for 3d vision,”arXiv preprint arXiv:2602.14662, 2026
-
[34]
Fgo-slam: Enhancing gaussian slam with globally consistent opacity radiance field,
F. Zhu, Y . Zhao, Z. Chen, B. Yu, and H. Zhu, “Fgo-slam: Enhancing gaussian slam with globally consistent opacity radiance field,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 11 075–11 081
2025
-
[35]
Nice-slam: Neural implicit scalable encoding for slam,
Z. Zhu, S. Peng, V . Larsson, W. Xu, H. Bao, Z. Cui, M. R. Oswald, and M. Pollefeys, “Nice-slam: Neural implicit scalable encoding for slam,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022, Conference Proceedings, pp. 12 776–12 786
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.