Optimal any-angle path planning in static and dynamic environments
Pith reviewed 2026-07-02 19:07 UTC · model grok-4.3
The pith
Elliptical forward expansion and field-of-view scanning yield Zeta*-SIPP, an optimal any-angle planner more than twenty times faster than prior methods in dynamic settings.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
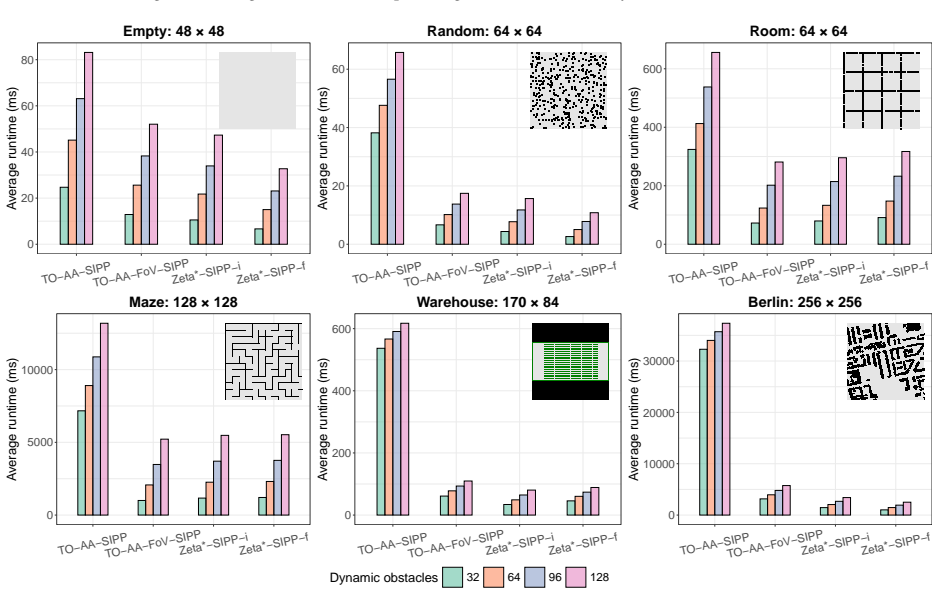
The paper shows that elliptical forward expansion and field-of-view replacements, integrated via inverted and forward scanning, produce Zeta* that matches the performance of existing static any-angle planners while extending directly to dynamic environments through Zeta*-SIPP, which is more than twenty times faster than TO-AA-SIPP yet still returns provably optimal any-angle paths.
What carries the argument
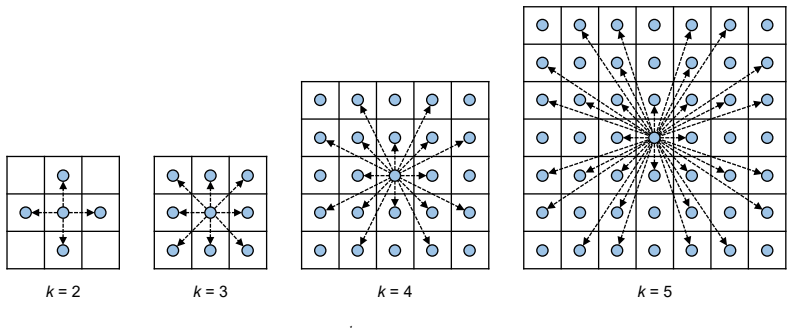
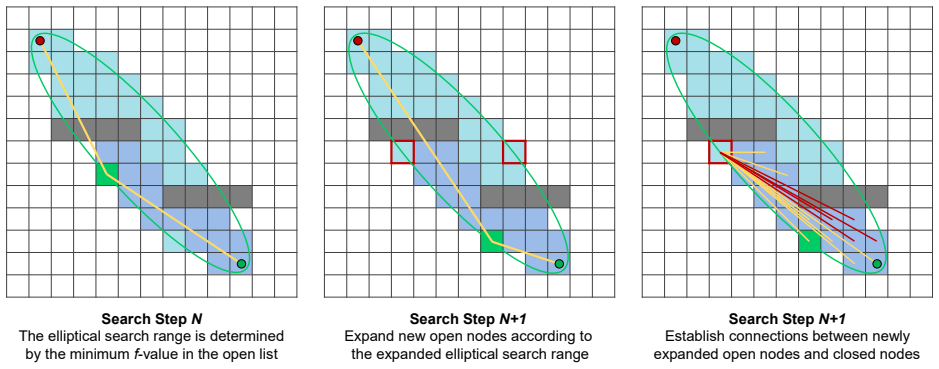
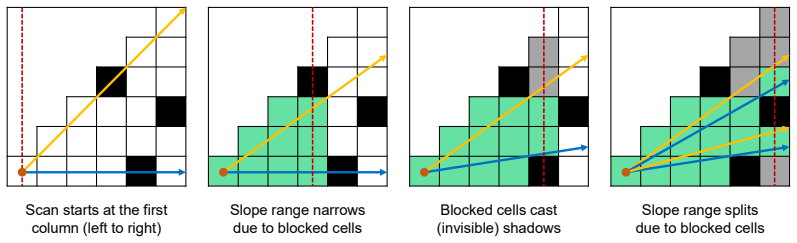
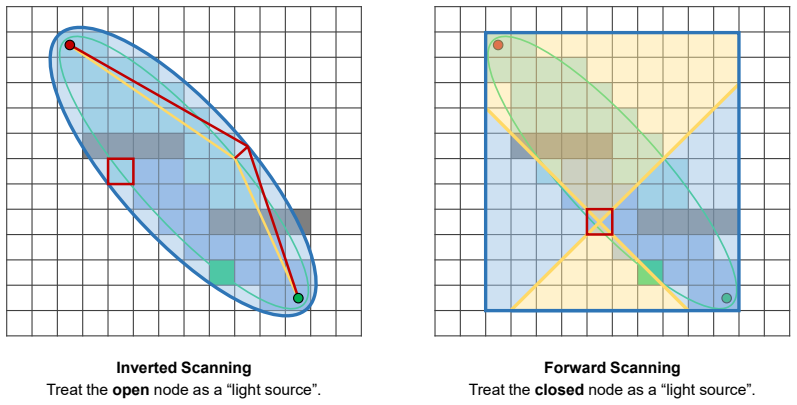
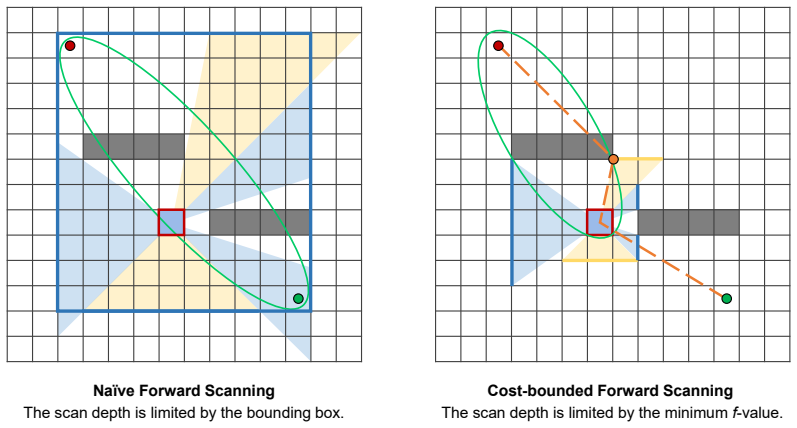
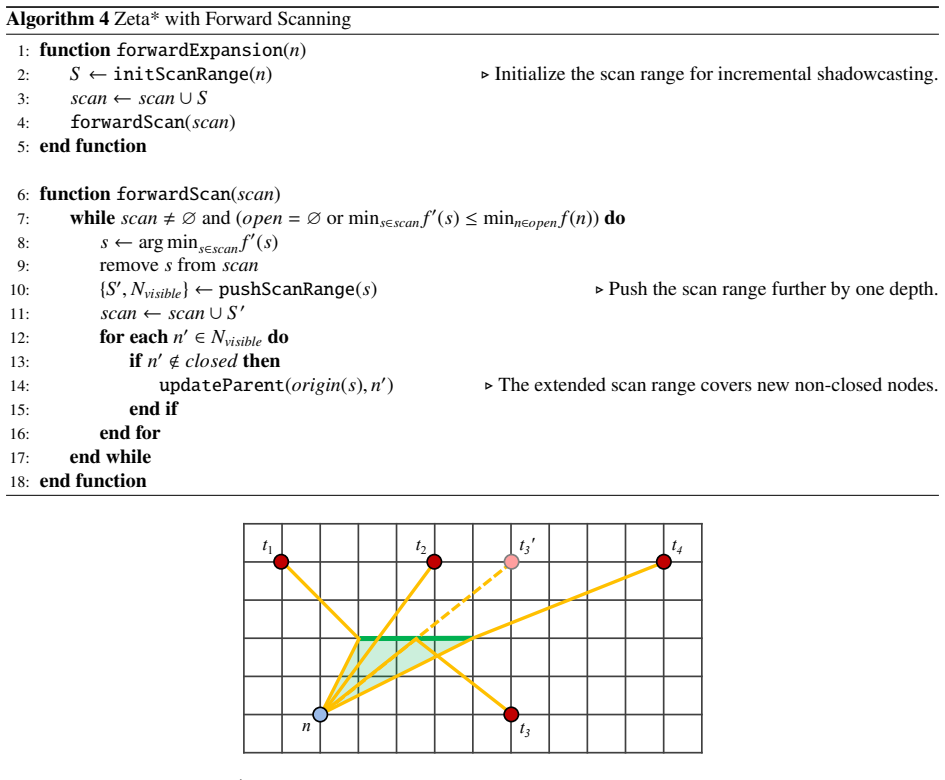
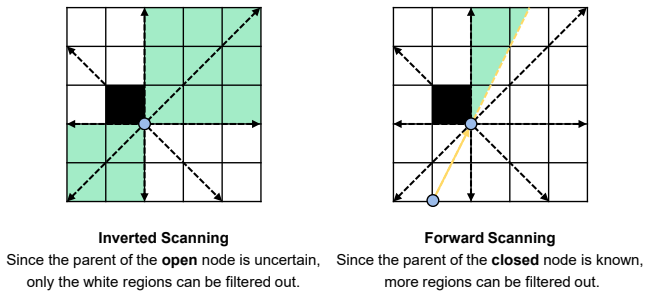
Elliptical forward expansion, which limits search to ellipse neighborhoods, combined with field-of-view visibility replacement and the choice of inverted versus forward scanning to connect nodes.
If this is right
- Zeta* achieves performance comparable to Anya in static environments yet extends more readily to other settings.
- Zeta*-SIPP handles both static and dynamic obstacles while preserving optimality.
- Inverted scanning connects visual links from open nodes and forward scanning initiates from closed nodes.
- The two acceleration techniques together make repeated optimal any-angle replanning practical for navigation among moving obstacles.
Where Pith is reading between the lines
- The same scanning and expansion ideas could be tested on three-dimensional grids to check whether the reported speedups scale beyond two dimensions.
- In applications that require frequent replanning, the reduced per-query time might allow the planner to incorporate updated obstacle predictions at higher rates.
- Direct comparison of the produced paths against known optimal solutions on standardized dynamic benchmark maps would confirm the claimed factor-of-twenty improvement holds across varied obstacle densities.
Load-bearing premise
The elliptical forward expansion and field-of-view replacements preserve optimality guarantees while accelerating search in both static and dynamic obstacle settings.
What would settle it
A concrete counterexample in which Zeta*-SIPP returns a path whose length exceeds the true shortest any-angle path in a dynamic grid instance would falsify the optimality claim.
Figures




read the original abstract
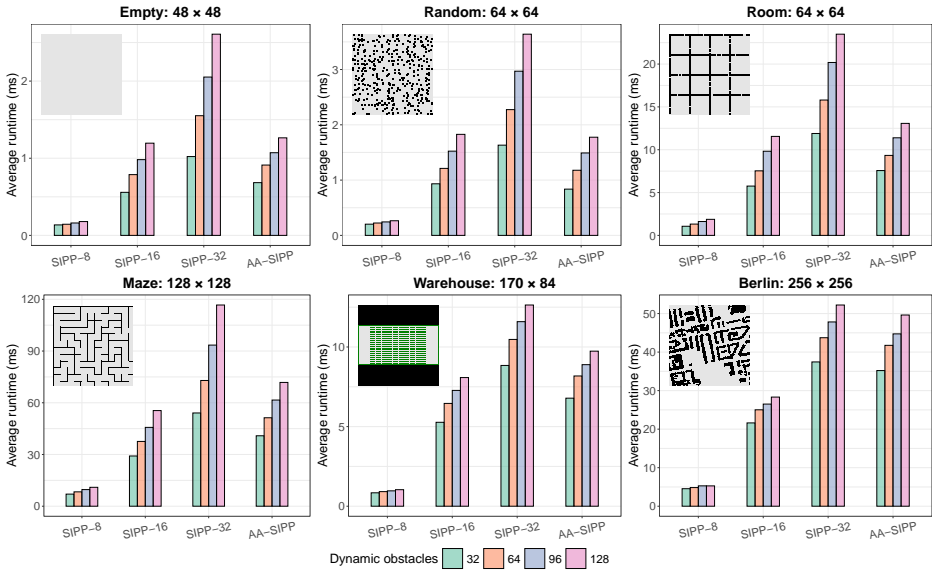
Any-angle path planning extends traditional graph-based path planning by allowing movement between any pair of vertices, rather than being restricted by predefined edges. It can find straighter and shorter paths in continuous space with graphs, making it particularly suitable for navigation in open areas such as airspaces, warehouses, and oceans. Many any-angle path-planning algorithms have been proposed, but only a few can guarantee optimal solutions, especially in the presence of dynamic obstacles. To address this challenge, this article focuses on optimal any-angle path planning on grids and introduces two general techniques that accelerate computation while preserving optimality in both static and dynamic environments: 1) elliptical forward expansion, which leverages ellipse-based neighborhoods to restrict the search space, and 2) field of view, which replaces traditional line-of-sight methods to speed up visibility checks. To integrate these two techniques, inverted and forward scanning are introduced. Inverted scanning establishes visual connections from open nodes, whereas forward scanning initiates scans from closed nodes. Building on the proposed techniques, Zeta* and Zeta*-SIPP are developed for static and dynamic environments respectively. Zeta*, when combined with forward scanning, is similar to the state-of-the-art algorithm Anya and attains comparable performance. Unlike Anya, Zeta* can be readily extended to other settings, such as dynamic environments (e.g., Zeta*-SIPP). Zeta*-SIPP, with either scanning method, is more than 20 times faster than the corresponding state-of-the-art optimal planner TO-AA-SIPP. Overall, this research identifies the key requirements for achieving optimal any-angle path planning and introduces a unified approach suitable for different environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces Zeta* for optimal any-angle path planning in static grid environments and Zeta*-SIPP for dynamic environments with moving obstacles. It proposes two acceleration techniques—elliptical forward expansion to limit the search neighborhood and field-of-view replacement for line-of-sight visibility checks—combined via inverted scanning (from open nodes) and forward scanning (from closed nodes). The central claims are that these substitutions preserve optimality guarantees and that Zeta*-SIPP (with either scanning mode) is more than 20 times faster than the state-of-the-art optimal planner TO-AA-SIPP.
Significance. If the optimality invariants hold, the work would offer a practically significant improvement for real-time navigation in dynamic settings such as warehouses or airspaces, by delivering a unified, extensible framework that extends static any-angle methods (comparable to Anya) to dynamic cases without sacrificing guarantees. The explicit handling of safe intervals in SIPP integration is a positive aspect.
major comments (2)
- [Abstract] Abstract and integration paragraph: the claim that elliptical forward expansion plus field-of-view checks (under both scanning modes) preserve optimality in dynamic settings rests on an unstated invariant that a FOV scan never omits a visibility edge that exhaustive line-of-sight would have found when safe intervals change. No formal argument, proof sketch, or counter-example verification is supplied showing that shorter any-angle paths remain considered; this directly undermines the comparison of Zeta*-SIPP to TO-AA-SIPP as optimal planners.
- [Abstract] The manuscript asserts large speedups (more than 20x) while preserving optimality, yet provides neither the full derivation of the optimality invariant for dynamic obstacles nor the experimental tables/figures with raw timing and path-length data needed to verify the claim. Without these, the speedup result cannot be assessed as comparing equivalent optimal planners.
minor comments (2)
- Notation for the two scanning modes and their interaction with SIPP safe intervals should be defined explicitly before the algorithm descriptions.
- The relationship between Zeta* (static) and Zeta*-SIPP (dynamic) would benefit from a short table contrasting the two algorithms' data structures and termination conditions.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for clearer presentation of optimality arguments and supporting data. We address each major comment below with clarifications drawn from the manuscript and indicate where revisions can strengthen the submission without altering its core claims.
read point-by-point responses
-
Referee: [Abstract] Abstract and integration paragraph: the claim that elliptical forward expansion plus field-of-view checks (under both scanning modes) preserve optimality in dynamic settings rests on an unstated invariant that a FOV scan never omits a visibility edge that exhaustive line-of-sight would have found when safe intervals change. No formal argument, proof sketch, or counter-example verification is supplied showing that shorter any-angle paths remain considered; this directly undermines the comparison of Zeta*-SIPP to TO-AA-SIPP as optimal planners.
Authors: The manuscript's sections on Zeta*-SIPP integration explicitly address how safe-interval handling combines with elliptical expansion and FOV scanning to maintain all relevant visibility edges. Inverted scanning from open nodes and forward scanning from closed nodes ensure that any visibility connection within the ellipse that would be found by exhaustive LOS is still considered, because FOV replacement is defined to replicate the same neighbor set under the current safe intervals. We acknowledge that a compact proof sketch is not highlighted in the abstract or integration paragraph and can add one in revision to make the invariant explicit, including a brief argument that no shorter any-angle path is omitted when intervals update. revision: partial
-
Referee: [Abstract] The manuscript asserts large speedups (more than 20x) while preserving optimality, yet provides neither the full derivation of the optimality invariant for dynamic obstacles nor the experimental tables/figures with raw timing and path-length data needed to verify the claim. Without these, the speedup result cannot be assessed as comparing equivalent optimal planners.
Authors: The full derivation of the optimality invariant for dynamic obstacles appears in the Zeta*-SIPP analysis sections, which show that the scanning modes and FOV substitution preserve the same search frontier as exhaustive methods while respecting safe intervals. The experimental results section already contains tables and figures reporting average speedups, path lengths, and success rates against TO-AA-SIPP. To aid verification we can append the underlying raw timing and path-length values in a supplementary table during revision. revision: yes
Circularity Check
No significant circularity; algorithmic claims rest on external comparisons and stated techniques
full rationale
The paper develops Zeta* and Zeta*-SIPP by introducing elliptical forward expansion and field-of-view visibility checks, integrated via inverted/forward scanning. These are presented as extensions of standard any-angle search (e.g., similar to Anya) with explicit performance benchmarks against TO-AA-SIPP. No equations reduce claimed speedups or optimality to fitted parameters defined on the same data, no self-citation chains justify core invariants, and no renaming of known results occurs. The derivation is self-contained against external planners and does not exhibit any of the enumerated circular patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Grid-based discretization allows any-angle movement between vertices while preserving optimality when visibility checks are exact.
Reference graph
Works this paper leans on
-
[1]
Artificial Intelligence 301, 103560
Path-length analysis for grid-based path planning. Artificial Intelligence 301, 103560. doi:10.1016/j.artint.2021.103560. Bergstr¨om, B.,
-
[2]
Algorithm for computer control of a digital plotter. IBM Systems Journal 4, 25–30. doi: 10.1147/sj.41.0025. Choi, S., Lee, J.Y ., Yu, W.,
-
[3]
Fast any-angle path planning on grid maps with non-collision pruning, in: 2010 IEEE International Conference on Robotics and Biomimetics, IEEE. pp. 1051–1056. doi: 10.1109/ROBIO.2010.5723473. Choi, S., Yu, W.,
-
[4]
Any-angle path planning on non-uniform costmaps, in: 2011 IEEE International Conference on Robotics and Automation, IEEE. pp. 5615–5621. doi: 10.1109/ICRA.2011.5979769. Cui, M.L., Harabor, D.D., Grastien, A.,
-
[5]
Journal of Artificial Intelligence Research 39, 533–579
Theta*: Any-angle path planning on grids. Journal of Artificial Intelligence Research 39, 533–579. doi: 10.1613/jair.2994. Debenham, E.R., Solis-Oba, R.,
-
[6]
Field D*: An interpolation-based path planner and replanner, in: Robotics Research: Results of the 12th Interna- tional Symposium ISRR, Springer. pp. 239–253. doi:10.1007/978-3-540-48113-3_22 . Gammell, J.D., Barfoot, T.D., Srinivasa, S.S.,
-
[7]
The Interna- tional Journal of Robotics Research 39, 543–567
Batch informed trees (BIT*): Informed asymptotically optimal anytime search. The Interna- tional Journal of Robotics Research 39, 543–567. doi: 10.1177/0278364919890396. Gammell, J.D., Srinivasa, S.S., Barfoot, T.D.,
-
[8]
Informed RRT*: Optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic, in: 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2997–3004. doi:10.1109/ IROS.2014.6942976. Gammell, J.D., Srinivasa, S.S., Barfoot, T.D.,
-
[9]
Batch informed trees (BIT*): Sampling-based optimal planning via the heuristically guided search of implicit random geometric graphs, in: 2015 IEEE International Conference on Robotics and Automation (ICRA), pp. 3067–3074. doi:10.1109/ICRA.2015.7139620. Harabor, D.D.,
-
[10]
Journal of Artificial Intelligence Research 56, 89–118
Optimal any-angle pathfinding in practice. Journal of Artificial Intelligence Research 56, 89–118. doi: 10.1613/jair.5007. Hart, P.E., Nilsson, N.J., Raphael, B.,
-
[11]
IEEE Transactions on Systems Science and Cybernetics 4, 100–107
A formal basis for the heuristic determination of minimum cost paths. IEEE Transactions on Systems Science and Cybernetics 4, 100–107. doi: 10.1109/TSSC.1968.300136. Hechenberger, R., Stuckey, P.J., Harabor, D., Le Bodic, P., Cheema, M.A.,
-
[12]
Online computation of euclidean shortest paths in two dimensions, in: Proceedings of the International Conference on Automated Planning and Scheduling, pp. 134–142. doi: 10.1609/icaps.v30i1.6654. Ibrahim, I., Gillis, J., Decr ´e, W., Swevers, J.,
-
[13]
IEEE Robotics and Automation Letters doi: 10.1109/LRA.2024.3460409
Exact wavefront propagation for globally optimal one-to-all path planning on 2d cartesian grids. IEEE Robotics and Automation Letters doi: 10.1109/LRA.2024.3460409. Lai, Y .K., Vadakkepat, P., Xiang, C.,
-
[14]
Robotics and Autonomous Systems 172, 104606
R2: Optimal vector-based and any-angle 2D path planning with non-convex obstacles. Robotics and Autonomous Systems 172, 104606. doi: 10.1016/j.robot.2023.104606. Milazzo, A.,
-
[15]
Improving efficiency in any-angle path-planning algorithms, in: 2012 6th IEEE International Conference Intelligent Systems, IEEE. pp. 213–218. doi: 10.1109/IS.2012.6335138. Nash, A., Koenig, S.,
-
[16]
Any-angle path planning. AI Magazine 34, 85–107. doi: 10.1609/aimag.v34i4.2512. Nash, A., Koenig, S., Likhachev, M.,
-
[17]
Lazy Theta*: Any-angle path planning and path length analysis in 3D, in: Proceedings of the AAAI Conference on Artificial Intelligence, pp. 147–154. doi:10.1609/aaai.v24i1.7566. Oh, S., Leong, H.W.,
-
[18]
Strict Theta*: Shorter motion path planning using taut paths, in: Proceedings of the International Conference on Automated Planning and Scheduling, pp. 253–257. doi: 10.1609/icaps.v26i1.13744. Phillips, M., Likhachev, M.,
-
[19]
SIPP: Safe interval path planning for dynamic environments, in: 2011 IEEE International Conference on Robotics and Automation, pp. 5628–5635. doi: 10.1109/ICRA.2011.5980306. Rivera, N., Hern ´andez, C., Hormaz ´abal, N., Baier, J.A.,
-
[20]
Journal of Artificial Intelligence Research 67, 81–113
The 2 k neighborhoods for grid path planning. Journal of Artificial Intelligence Research 67, 81–113. doi: 10.1613/jair.1.11383. Russell, S.J., Norvig, P.,
-
[21]
Artificial Intelligence 302, 103624
Fast optimal and bounded suboptimal Euclidean pathfinding. Artificial Intelligence 302, 103624. doi: 10.1016/j.artint.2021.103624. Silver, D.,
-
[22]
Cooperative pathfinding, in: Proceedings of the AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment, 32 pp. 117–122. doi: 10.1609/aiide.v1i1.18726. Sinyukov, D.A., Padir, T.,
-
[23]
Cwave: Theory and practice of a fast single-source any-angle path planning algorithm. Robotica 38, 207–234. doi:10.1017/S0263574719000560. ˇSiˇsl´ak, D., V olf, P., Pechoucek, M.,
-
[24]
Accelerated A* trajectory planning: Grid-based path planning comparison, in: Proceedings of the 19th International Conference on Automated Planning & Scheduling (ICAPS), Citeseer. pp. 74–81. doi:10.1609/icaps.v25i1.13724. Stern, R., Sturtevant, N.R., Felner, A., Koenig, S., Ma, H., Walker, T.T., Li, J., Atzmon, D., Cohen, L., Kumar, T.K.S., Boyarski, E., ...
-
[25]
1109/TCIAIG.2012.2197681. Uras, T., Koenig, S., 2015a. An empirical comparison of any-angle path-planning algorithms, in: Proceedings of the International Symposium on Combinatorial Search, pp. 206–210. doi: 10.1609/socs.v6i1.18382. Uras, T., Koenig, S., 2015b. Speeding-up any-angle path-planning on grids, in: Proceedings of the International Conference o...
-
[26]
Any-angle pathfinding for multiple agents based on SIPP algorithm, in: Proceedings of the International Conference on Automated Planning and Scheduling, pp. 586–594. doi: 10.1609/icaps.v27i1.13856. Yakovlev, K., Andreychuk, A.,
-
[27]
Towards time-optimal any-angle path planning with dynamic obstacles, in: Proceedings of the International Conference on Automated Planning and Scheduling, pp. 405–414. doi: 10.1609/icaps.v31i1.15986. Yakovlev, K., Andreychuk, A., Stern, R.,
-
[28]
Optimal and bounded suboptimal any-angle multi-agent pathfinding, in: 2024 IEEE /RSJ Interna- tional Conference on Intelligent Robots and Systems (IROS), IEEE. pp. 7996–8001. doi:10.1109/IROS58592.2024.10801691. Yap, P., Burch, N., Holte, R., Schaeffer, J.,
-
[29]
Block A*: Database-driven search with applications in any-angle path-planning, in: Proceedings of the AAAI Conference on Artificial Intelligence, pp. 120–125. doi:10.1609/aaai.v25i1.7813. Zou, Y ., Borst, C.,
-
[30]
Zeta*-SIPP: Improved time-optimal any-angle safe-interval path planning, in: Proceedings of the 33rd International Joint Conference on Artificial Intelligence, pp. 6823–6830. doi:10.24963/ijcai.2024/754. Zou, Y ., Borst, C.,
-
[31]
International Journal of Human-Computer Studies 203, 103573
Algorithmic transparency in path planning: A visual approach to enhancing human understanding. International Journal of Human-Computer Studies 203, 103573. doi: 10.1016/j.ijhcs.2025.103573. 33
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.