Tactile-Proprioceptive Sensor Fusion for Contact Wrench Estimation in Whole-Body Physical Human-Robot Interaction
Pith reviewed 2026-06-29 12:15 UTC · model grok-4.3
The pith
Pneumatic tactile pads fused with motor-current proprioception reconstruct multi-axis contact forces on robot surfaces by using contact indicators that avoid friction identification.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
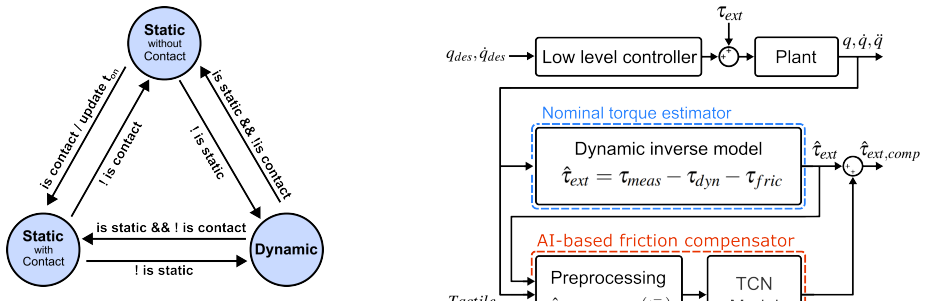
Tactile cues from pneumatic skin pads serve as contact indicators that bypass the ambiguity between frictional residues and applied external forces, enabling highly sensitive contact detection without explicit friction identification. We fuse these cues with motor-current-based proprioception to reconstruct multi-axis contact forces on the robot surface. To maintain accuracy during motion, we employ a temporal convolutional network (TCN) to mitigate friction hysteresis during stick-slip transitions, reducing uncertainty at contact onset and yielding smooth, responsive guidance.
What carries the argument
Tactile-proprioceptive fusion in which pneumatic skin pads act as binary contact detectors that gate and correct continuous proprioceptive torque estimates, with a temporal convolutional network compensating dynamic friction effects.
If this is right
- Multi-axis forces are reconstructed accurately in stationary contacts on the skin-integrated robot arm.
- Simultaneous contact force estimation and kinesthetic teaching are achieved during robot motion.
- Sensitivity and responsiveness increase across varied contact conditions relative to tactile-only and proprioceptive-only methods.
- The fusion supplies a pathway to safe and intuitive whole-body physical human-robot interaction.
Where Pith is reading between the lines
- The same fusion logic could apply to other robots equipped with both skin and joint-torque sensing without robot-specific retraining.
- Whole-body versions of the skin would allow force estimation at arbitrary surface locations rather than only at the arm.
- The contact-indicator role of the pads might reduce reliance on high-precision joint torque sensors in future collaborative robots.
Load-bearing premise
The temporal convolutional network reliably mitigates friction hysteresis during stick-slip transitions without introducing additional estimation errors or requiring extensive per-robot calibration.
What would settle it
A direct comparison showing that the fused force estimates exhibit larger errors than proprioception alone specifically at stick-slip transitions, or that light contacts remain undetected despite the tactile cue, would falsify the claimed improvement.
Figures

read the original abstract
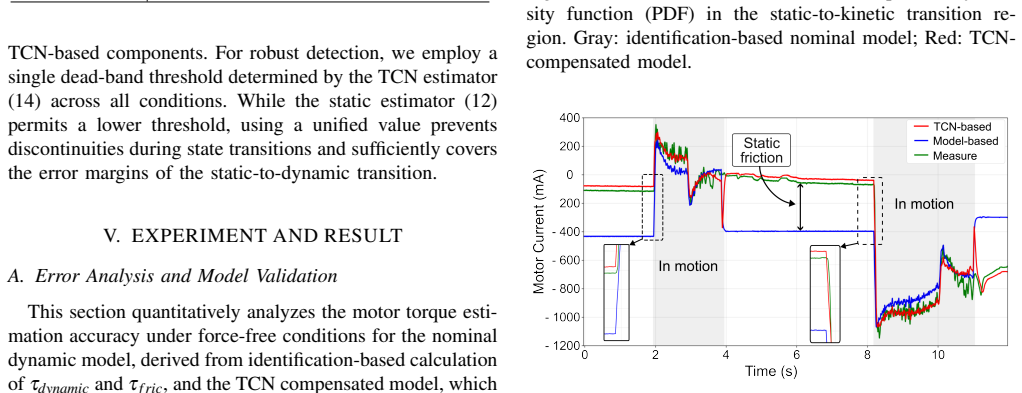
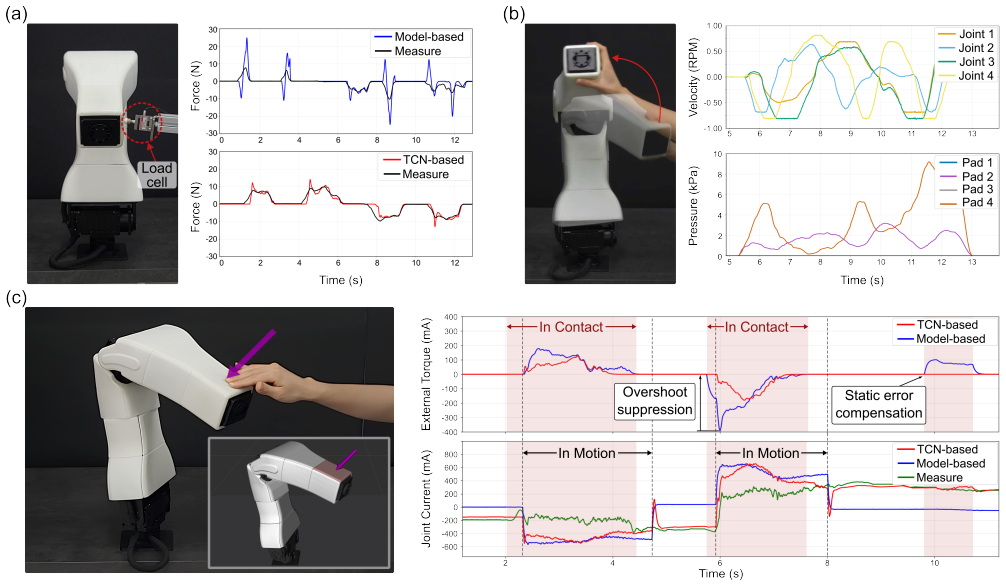
Direct physical guidance is a natural means of teaching and interacting with robots, and robotic skins make a key contribution by enabling sensitive contact sensing and localization. This paper presents a tactile-proprioceptive sensor fusion framework for natural physical human-robot interaction. Tactile cues from pneumatic skin pads serve as contact indicators that bypass the ambiguity between frictional residues and applied external forces, enabling highly sensitive contact detection without explicit friction identification. We fuse these cues with motor-current-based proprioception to reconstruct multi-axis contact forces on the robot surface. To maintain accuracy during motion, we employ a temporal convolutional network (TCN) to mitigate friction hysteresis during stick-slip transitions, reducing uncertainty at contact onset and yielding smooth, responsive guidance. We validate the approach on a skin-integrated robot arm: (i) multi-axis forces are reconstructed in stationary contacts, and (ii) simultaneous force estimation and kinesthetic teaching are demonstrated. Results indicate improved sensitivity and responsiveness across diverse contact conditions compared with tactile-only and proprioceptive-only baselines, supporting tactile-proprioceptive fusion as a reliable pathway to safe, intuitive physical human-robot interaction.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a tactile-proprioceptive sensor fusion framework for contact wrench estimation during physical human-robot interaction. Pneumatic skin pads provide tactile contact indicators that bypass frictional ambiguity without explicit friction identification; these are fused with motor-current proprioception to reconstruct multi-axis contact forces. A temporal convolutional network (TCN) mitigates friction hysteresis during stick-slip transitions to maintain accuracy in motion. Validation occurs on a single skin-integrated robot arm, demonstrating multi-axis force reconstruction for stationary contacts and simultaneous estimation during kinesthetic teaching, with reported gains in sensitivity and responsiveness over tactile-only and proprioceptive-only baselines.
Significance. If the results hold with clear evidence that the TCN does not rely on per-robot training data, the work would offer a practical advance for safe, intuitive pHRI by enabling responsive contact sensing and force estimation without explicit friction models. The real-hardware validation spanning both stationary and dynamic kinesthetic scenarios, together with the explicit comparison to single-modality baselines, constitutes a concrete strength.
major comments (2)
- [Abstract] Abstract: the central claim that tactile cues enable contact detection 'without explicit friction identification' is load-bearing, yet the description of the TCN provides no information on its training regime, data sources, or whether training was performed exclusively on the target robot. If the TCN learns robot-specific hysteresis patterns from proprioceptive signals, the fusion no longer avoids implicit friction identification, and reported sensitivity gains may be artifacts of that calibration rather than the proposed principle.
- [Validation] Validation section: experiments are confined to a single skin-integrated arm with no cross-configuration or cross-robot testing reported. This limits the ability to substantiate that the TCN-based mitigation generalizes without extensive per-robot calibration, which directly affects the claim of a reliable pathway to safe pHRI.
minor comments (2)
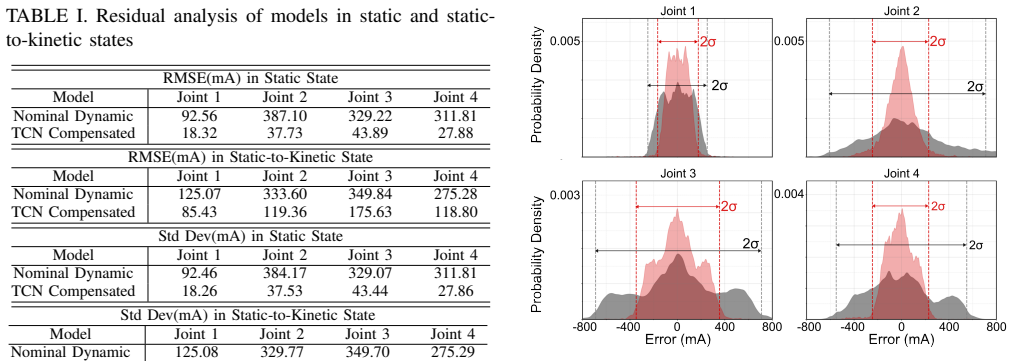
- [Abstract] The abstract would be strengthened by inclusion of at least one quantitative metric (e.g., force RMSE or detection latency) supporting the stated improvements over baselines.
- Notation for the fused wrench estimate and the TCN input features should be defined explicitly at first use to improve readability for readers outside the immediate subfield.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments point-by-point below, clarifying the role of the tactile modality and the scope of the validation while committing to textual revisions where needed.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that tactile cues enable contact detection 'without explicit friction identification' is load-bearing, yet the description of the TCN provides no information on its training regime, data sources, or whether training was performed exclusively on the target robot. If the TCN learns robot-specific hysteresis patterns from proprioceptive signals, the fusion no longer avoids implicit friction identification, and reported sensitivity gains may be artifacts of that calibration rather than the proposed principle.
Authors: The core mechanism for bypassing explicit friction identification is the use of pneumatic tactile pads as binary contact indicators; these signals are generated by pressure changes upon physical contact and do not depend on modeling or estimating friction coefficients. The TCN operates downstream on the fused proprioceptive stream solely to capture temporal dynamics during stick-slip transitions. Training data for the TCN was collected on the experimental platform, but this constitutes learning of temporal filtering behavior rather than identification of friction parameters. We will revise the methods and abstract to explicitly describe the TCN training regime, data sources, and the separation between tactile contact detection and proprioceptive temporal modeling. revision: yes
-
Referee: [Validation] Validation section: experiments are confined to a single skin-integrated arm with no cross-configuration or cross-robot testing reported. This limits the ability to substantiate that the TCN-based mitigation generalizes without extensive per-robot calibration, which directly affects the claim of a reliable pathway to safe pHRI.
Authors: The validation is indeed restricted to a single robot arm, and we do not present cross-robot or cross-configuration results. The manuscript demonstrates feasibility, baseline comparisons, and real-time performance on the reported hardware. We will revise the validation and discussion sections to explicitly acknowledge this scope limitation and to qualify the generalization statement as requiring platform-specific TCN training data when moving to new robots. revision: yes
Circularity Check
No circularity: derivation relies on empirical fusion and validation, not self-referential reductions
full rationale
The abstract and description present a sensor fusion method using pneumatic tactile cues as contact indicators combined with motor-current proprioception, plus a TCN for hysteresis mitigation. No equations, fitted parameters renamed as predictions, or self-citation chains are shown that reduce the central claims to inputs by construction. Validation on a single arm for stationary and kinesthetic cases is described as independent testing. This matches the default expectation of self-contained work; the skeptic concern about TCN training is external speculation not supported by quoted paper text.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Physical human– robot collaboration: Robotic systems, learning methods, collaborative strategies, sensors, and actuators,
U. E. Ogenyi, J. Liu, C. Yang, Z. Ju, and H. Liu, “Physical human– robot collaboration: Robotic systems, learning methods, collaborative strategies, sensors, and actuators,”IEEE transactions on cybernetics, vol. 51, no. 4, pp. 1888–1901, 2019
1901
-
[2]
Effortless creation of safe robots from modules through self-programming and self- verification,
M. Althoff, A. Giusti, S. B. Liu, and A. Pereira, “Effortless creation of safe robots from modules through self-programming and self- verification,”Science Robotics, vol. 4, no. 31, p. eaaw1924, 2019
2019
-
[3]
Collision detection, identification, and localization on the dlr sara robot with sensing redundancy,
M. Iskandar, O. Eiberger, A. Albu-Sch ¨affer, A. De Luca, and A. Diet- rich, “Collision detection, identification, and localization on the dlr sara robot with sensing redundancy,” in2021 IEEE international conference on robotics and automation (ICRA). IEEE, 2021, pp. 3111–3117
2021
-
[4]
External torque estimation using higher order sliding-mode observer for robot manipulators,
S. K. Kommuri, S. Han, and S. Lee, “External torque estimation using higher order sliding-mode observer for robot manipulators,” IEEE/ASME Transactions on Mechatronics, vol. 27, no. 1, pp. 513– 523, 2021
2021
-
[5]
Joint torque estimation using base force-torque sensor to facilitate physical human- robot interaction (phri),
S. K. Das, M. N. Saadatzi, S. Abubakar, and D. O. Popa, “Joint torque estimation using base force-torque sensor to facilitate physical human- robot interaction (phri),” in2019 IEEE 15th International Conference on Automation Science and Engineering (CASE). IEEE, 2019, pp. 1367–1372
2019
-
[6]
External force estimation using joint torque sensors for a robot manipulator,
J. Choi, S. Kanget al., “External force estimation using joint torque sensors for a robot manipulator,” in2012 IEEE International Confer- ence on Robotics and Automation. IEEE, 2012, pp. 4507–4512
2012
-
[7]
Sensorless collision detection for safe human-robot collaboration,
S.-D. Lee, M.-C. Kim, and J.-B. Song, “Sensorless collision detection for safe human-robot collaboration,” in2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2015, pp. 2392–2397
2015
-
[8]
Ladrc-based sensorless force control for robotic joint considering static friction,
B. Xu, P. Xu, and B. Li, “Ladrc-based sensorless force control for robotic joint considering static friction,”IEEE Transactions on Instrumentation and Measurement, 2024
2024
-
[9]
Motor-current-based estimation of cartesian contact forces and torques for robotic manipulators and its application to force control,
A. Wahrburg, J. B ¨os, K. D. Listmann, F. Dai, B. Matthias, and H. Ding, “Motor-current-based estimation of cartesian contact forces and torques for robotic manipulators and its application to force control,”IEEE Transactions on Automation Science and Engineering, vol. 15, no. 2, pp. 879–886, 2017
2017
-
[10]
Contact force estimation of robot manipulators with imperfect dynamic model: On gaussian process adaptive disturbance kalman filter,
Y . Wei, S. Lyu, W. Li, X. Yu, Z. Wang, and L. Guo, “Contact force estimation of robot manipulators with imperfect dynamic model: On gaussian process adaptive disturbance kalman filter,”IEEE Transac- tions on Automation Science and Engineering, vol. 21, no. 3, pp. 3524– 3537, 2023
2023
-
[11]
Sensorless estimation of contact using deep- learning for human-robot interaction,
S. Shan and Q.-C. Pham, “Sensorless estimation of contact using deep- learning for human-robot interaction,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 12 935–12 941
2024
-
[12]
Contact force estimation using uncertain torque model and friction models for robot manipulator,
J. Shim, S. Lee, D. Jeon, and J.-I. Ha, “Contact force estimation using uncertain torque model and friction models for robot manipulator,” IEEE Transactions on Industrial Electronics, vol. 71, no. 10, pp. 12 634–12 644, 2024
2024
-
[13]
A pinn-based friction-inclusive dynamics modeling method for industrial robots,
H. Hu, Z. Shen, and C. Zhuang, “A pinn-based friction-inclusive dynamics modeling method for industrial robots,”IEEE Transactions on Industrial Electronics, 2024
2024
-
[14]
A comprehensive realization of robot skin: Sensors, sensing, control, and applications,
G. Cheng, E. Dean-Leon, F. Bergner, J. R. G. Olvera, Q. Leboutet, and P. Mittendorfer, “A comprehensive realization of robot skin: Sensors, sensing, control, and applications,”Proceedings of the IEEE, vol. 107, no. 10, pp. 2034–2051, 2019
2034
-
[15]
A biomimetic elastomeric robot skin using electrical impedance and acoustic to- mography for tactile sensing,
K. Park, H. Yuk, M. Yang, J. Cho, H. Lee, and J. Kim, “A biomimetic elastomeric robot skin using electrical impedance and acoustic to- mography for tactile sensing,”Science Robotics, vol. 7, no. 67, p. eabm7187, 2022
2022
-
[16]
Large-scale vision-based tactile sensing for robot links: Design, modeling, and evaluation,
L. Van Duong and V . A. Ho, “Large-scale vision-based tactile sensing for robot links: Design, modeling, and evaluation,”IEEE Transactions on Robotics, vol. 37, no. 2, pp. 390–403, 2021
2021
-
[17]
Coboskin: Soft robot skin with variable stiffness for safer human–robot collaboration,
G. Pang, G. Yang, W. Heng, Z. Ye, X. Huang, H.-Y . Yang, and Z. Pang, “Coboskin: Soft robot skin with variable stiffness for safer human–robot collaboration,”IEEE Transactions on Industrial Elec- tronics, vol. 68, no. 4, pp. 3303–3314, 2021
2021
-
[18]
Learning contact- rich whole-body manipulation with example-guided reinforcement learning,
J. A. Barreiros, A. ¨O. ¨Onol, M. Zhang, S. Creasey, A. Goncalves, A. Beaulieu, A. Bhat, K. M. Tsui, and A. Alspach, “Learning contact- rich whole-body manipulation with example-guided reinforcement learning,”Science Robotics, vol. 10, no. 105, p. eads6790, 2025
2025
-
[19]
Low-cost and easy-to-build soft robotic skin for safe and contact-rich human–robot collaboration,
K. Park, K. Shin, S. Yamsani, K. Gim, and J. Kim, “Low-cost and easy-to-build soft robotic skin for safe and contact-rich human–robot collaboration,”IEEE Transactions on Robotics, vol. 40, pp. 2327– 2338, 2024
2024
-
[20]
icub whole-body control through force regulation on rigid non-coplanar contacts,
F. Nori, S. Traversaro, J. Eljaik, F. Romano, A. Del Prete, and D. Pucci, “icub whole-body control through force regulation on rigid non-coplanar contacts,”Frontiers in Robotics and AI, vol. 2, p. 6, 2015
2015
-
[21]
Estimation of contact forces using a virtual force sensor,
E. Magrini, F. Flacco, and A. De Luca, “Estimation of contact forces using a virtual force sensor,” in2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2014, pp. 2126– 2133
2014
-
[22]
Contact force estimation by fusing current and tactile information through kf for robot arm,
Y . Tian, C. Guang, R. Luo, S. Bao, J. Yuan, L. Du, and Z. Hu, “Contact force estimation by fusing current and tactile information through kf for robot arm,” in2024 IEEE International Conference on Robotics and Biomimetics (ROBIO). IEEE, 2024, pp. 2259–2264
2024
-
[23]
Dynamic friction model with thermal and load dependency: modeling, compensation, and external force estima- tion,
M. Iskandar and S. Wolf, “Dynamic friction model with thermal and load dependency: modeling, compensation, and external force estima- tion,” in2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 7367–7373
2019
-
[24]
A new model for control of systems with friction,
C. C. De Wit, H. Olsson, K. J. Astrom, and P. Lischinsky, “A new model for control of systems with friction,”IEEE Transactions on automatic control, vol. 40, no. 3, pp. 419–425, 1995
1995
-
[25]
The generalized maxwell- slip model: a novel model for friction simulation and compensation,
F. Al-Bender, V . Lampaert, and J. Swevers, “The generalized maxwell- slip model: a novel model for friction simulation and compensation,” IEEE Transactions on automatic control, vol. 50, no. 11, pp. 1883– 1887, 2005
2005
-
[26]
Papras: Plug-and-play robotic arm system,
J. Kim, D. C. Mathur, K. Shin, and S. Taylor, “Papras: Plug-and-play robotic arm system,”arXiv preprint arXiv:2302.09655, 2023
-
[27]
Human intention-oriented variable admittance control with power envelope regulation in physical human-robot interaction,
J. Chen and P. I. Ro, “Human intention-oriented variable admittance control with power envelope regulation in physical human-robot interaction,”Mechatronics, vol. 84, p. 102802, 2022
2022
-
[28]
Variable admittance control for safe physical human–robot interaction considering intuitive human intention,
L. Han, L. Zhao, Y . Huang, and W. Xu, “Variable admittance control for safe physical human–robot interaction considering intuitive human intention,”Mechatronics, vol. 97, p. 103098, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.