Active Sensing for RIS-Aided Tracking and Power Control: A Hybrid Neuroevolution and Supervised Learning Approach
Pith reviewed 2026-07-03 22:19 UTC · model grok-4.3
The pith
A dual-agent neural framework jointly tunes RIS phases and user power for accurate energy-efficient tracking of mobile devices.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
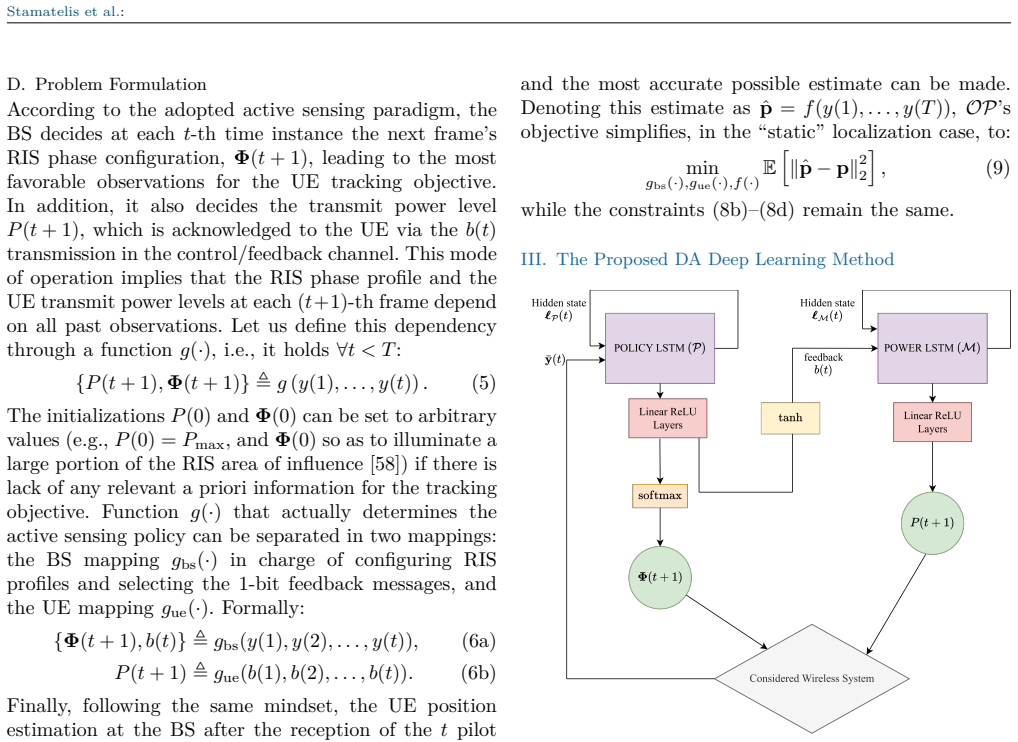
The Dual-Agent active sensing framework, trained by integrating the neuroevolution paradigm with supervised learning, jointly optimizes discrete RIS phase profiles and UE transmit power in real time. This overcomes non-differentiability of RIS responses and the strict bottleneck of single-bit feedback, enabling application to both single- and multi-antenna base stations and delivering highly accurate tracking that exceeds extended Kalman and particle filters as well as machine learning-based trackers.
What carries the argument
The Dual-Agent (DA) deep learning framework, where one neural network selects RIS phases and the second controls transmit power, trained via hybrid neuroevolution plus supervised learning.
If this is right
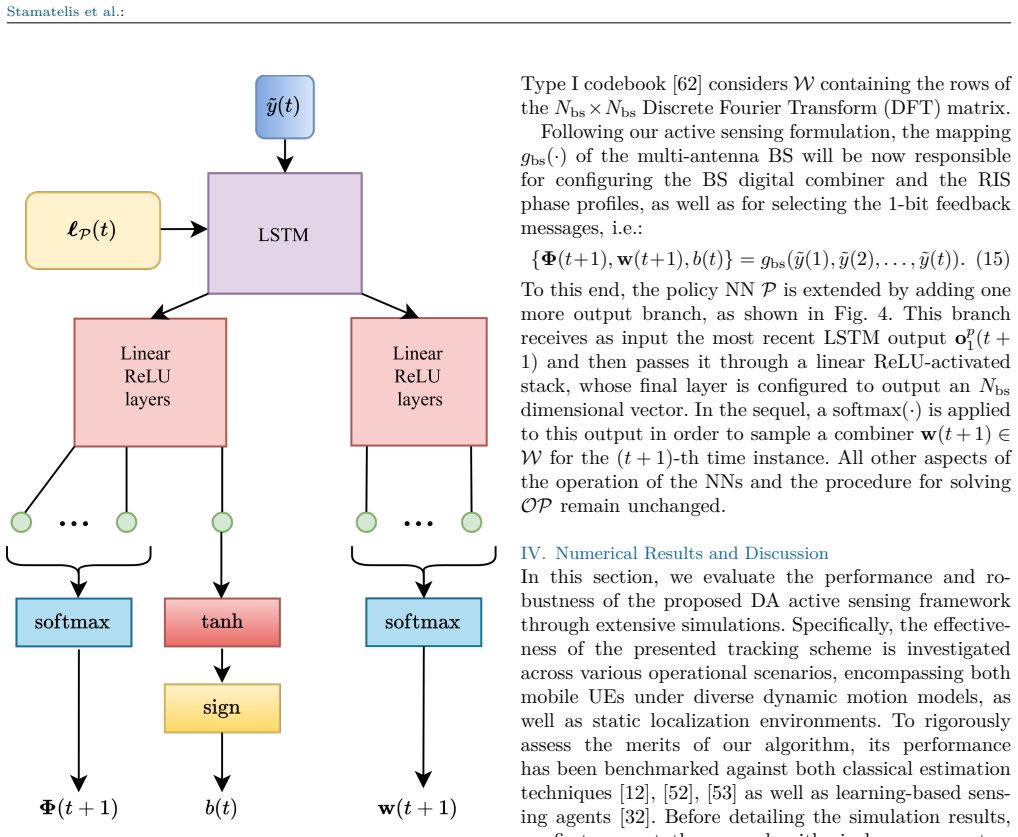
- The same framework structure works for single-antenna and multi-antenna base stations with only an added output branch for combiner selection.
- Single-bit feedback suffices for dynamic uplink power control while maintaining tracking accuracy.
- The method reduces energy use by limiting pilot transmissions through real-time power adaptation.
- Performance holds across diverse target motion models in numerical evaluations.
Where Pith is reading between the lines
- The same hybrid training pattern could apply to other wireless problems that involve discrete hardware constraints and quantized feedback.
- Extending the agents to multi-user scenarios would require only adding output dimensions for additional power decisions.
- Hardware-in-the-loop tests with measured RIS phase responses would directly check whether the simulated gains survive real non-idealities.
Load-bearing premise
The hybrid neuroevolution and supervised learning training can successfully train the agents despite the non-differentiable discrete RIS phases and the single-bit feedback bottleneck.
What would settle it
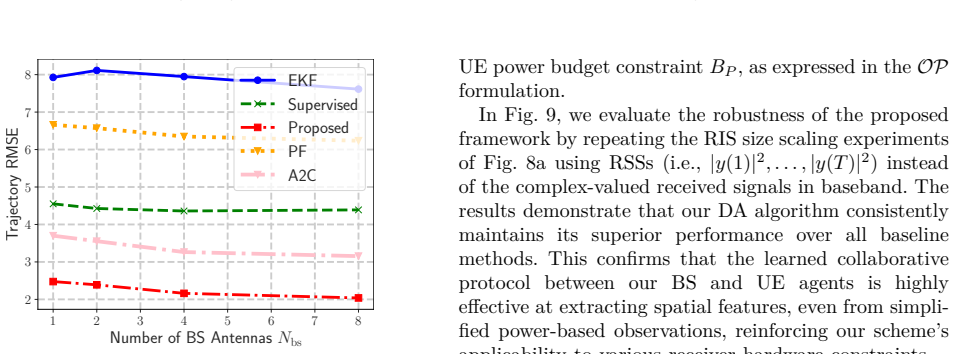
A set of tracking simulations on the same motion models where the DA framework produces higher root-mean-square error than an extended Kalman filter or particle filter.
Figures





















read the original abstract
This paper studies energy efficient tracking of power-limited mobile users with the assistance of a Reconfigurable Intelligent Surface (RIS). Since localization pilot transmissions dominate the energy budget of power-constrained devices, we introduce a low-overhead feedback link from the Base Station (BS) to the user to enable dynamic uplink power control. To navigate the discrete and decentralized nature of this active sensing problem, we propose a novel Dual-Agent (DA) deep learning framework that jointly optimizes the discrete RIS phase profiles and the UE's transmit power in real time. Specifically, our approach employs a hybrid training methodology integrating the neuroevolution paradigm with supervised learning, effectively overcoming the non-differentiability of discrete phase responses from the RIS unit elements and the strict information bottleneck of single-bit feedback messages for pilot power control. The proposed DA active sensing framework can be applied with both single- and multi-antenna BSs, the latter with only minor modifications in the structure of one NN: an additional output branch with appropriate structure is included for the latter case to select a valid digital combiner from a finite set. Extensive numerical simulations demonstrate that the proposed scheme achieves highly accurate and robust tracking across diverse target motion models, outperforming extended Kalman and particle filters, as well as, machine learning-based trackers. Furthermore, in static localization, it is shown to significantly outperform traditional fingerprinting schemes, deep reinforcement learning baselines, and standard backpropagation-based estimators.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a Dual-Agent (DA) deep learning framework for energy-efficient active sensing in RIS-aided tracking and uplink power control of power-limited mobile users. It jointly optimizes discrete RIS phase profiles and UE transmit power using a hybrid neuroevolution-supervised learning approach to handle non-differentiability and single-bit feedback constraints. The framework applies to single- and multi-antenna BSs (with minor NN modifications for the latter) and is evaluated via numerical simulations, claiming superior tracking accuracy and robustness over EKF, particle filters, and ML-based trackers across motion models, plus better static localization performance than fingerprinting, DRL, and backpropagation baselines.
Significance. If the simulation-based claims hold with adequate validation, the work would contribute to practical RIS-assisted localization by demonstrating a hybrid training method that navigates discrete optimization and limited feedback in real time. This could inform energy-efficient designs for power-constrained devices in future wireless systems, with the dual-agent structure and minor multi-antenna extension offering implementation flexibility. The absence of theoretical guarantees is offset by the emphasis on empirical performance across scenarios.
major comments (2)
- [Numerical Simulations] Numerical Simulations section: the abstract and results assert outperformance via extensive simulations, but the provided description supplies no details on simulation parameters (e.g., RIS size, SNR ranges, motion model specifics), datasets, exact metrics, or statistical significance testing; without these, it is impossible to assess whether the data support the central claims of robustness and superiority over EKF/particle filters and ML baselines.
- [Proposed DA Framework] Proposed DA Framework section: the hybrid neuroevolution + supervised learning methodology is presented as overcoming non-differentiability of discrete RIS phases and the single-bit feedback bottleneck, but the manuscript does not provide a concrete description or ablation showing how the neuroevolution component specifically resolves these issues (e.g., population size, mutation operators, or integration with the supervised loss); this is load-bearing for the performance claims.
minor comments (2)
- [Abstract] Abstract: the description of the multi-antenna extension is compressed; clarify the structure of the additional output branch for digital combiner selection.
- Notation: ensure consistent use of symbols for RIS phase profiles and power control variables across sections to avoid ambiguity.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive report. The two major comments identify areas where additional clarity will strengthen the manuscript. We address each point below and will incorporate the suggested expansions in the revised version.
read point-by-point responses
-
Referee: [Numerical Simulations] Numerical Simulations section: the abstract and results assert outperformance via extensive simulations, but the provided description supplies no details on simulation parameters (e.g., RIS size, SNR ranges, motion model specifics), datasets, exact metrics, or statistical significance testing; without these, it is impossible to assess whether the data support the central claims of robustness and superiority over EKF/particle filters and ML baselines.
Authors: We agree that the current description of the simulation setup is insufficient for independent verification. In the revised manuscript we will add a dedicated subsection (or expanded table) that explicitly lists all parameters: RIS dimensions, carrier frequency, SNR ranges, exact motion models and their parameters, channel models, performance metrics (RMSE, success rate, etc.), number of Monte Carlo runs, and any statistical significance tests performed. This will directly support the robustness and superiority claims. revision: yes
-
Referee: [Proposed DA Framework] Proposed DA Framework section: the hybrid neuroevolution + supervised learning methodology is presented as overcoming non-differentiability of discrete RIS phases and the single-bit feedback bottleneck, but the manuscript does not provide a concrete description or ablation showing how the neuroevolution component specifically resolves these issues (e.g., population size, mutation operators, or integration with the supervised loss); this is load-bearing for the performance claims.
Authors: We acknowledge that the manuscript would benefit from a more explicit algorithmic description of the neuroevolution component. In the revision we will expand the relevant subsection to include population size, mutation and crossover operators, selection mechanism, and the precise manner in which the neuroevolution output is combined with the supervised loss. We will also add a short ablation study isolating the contribution of the neuroevolution stage versus pure supervised learning, thereby clarifying how non-differentiability and the single-bit constraint are handled. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper's central contribution is a Dual-Agent deep learning framework using hybrid neuroevolution and supervised learning to jointly optimize discrete RIS phases and UE transmit power. All performance claims (tracking accuracy, robustness across motion models, outperformance of EKF/particle filters/fingerprinting/DRL baselines) are presented as outcomes of extensive numerical simulations rather than closed-form derivations or predictions. No equations or steps reduce a claimed result to a fitted parameter or self-citation by construction; the hybrid training methodology is introduced as a practical solution to non-differentiability and single-bit feedback, with results framed as empirical evidence. The derivation chain is therefore self-contained against external simulation benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Joint active RIS configuration and user power control for localization: A neuroevolution-based approach,
G. Stamateliset al., “Joint active RIS configuration and user power control for localization: A neuroevolution-based approach,” inProc. IEEE ICASSP, (Barcelona, Spain), 2026
2026
-
[2]
Localization methods for a mobile robot in urban environments,
A. Georgiev and P. Allen, “Localization methods for a mobile robot in urban environments,”IEEE Trans. Robot., vol. 20, no. 5, pp. 851–864, 2004
2004
-
[3]
SeqPolar: Sequence matching of polarized LiDAR map with HMM for intelligent vehicle localization,
Q. Taoet al., “SeqPolar: Sequence matching of polarized LiDAR map with HMM for intelligent vehicle localization,”IEEE Trans. Veh. Technol., vol. 71, no. 7, pp. 7071–7083, 2022
2022
-
[4]
A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications,
S. Kuuttiet al., “A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications,”IEEE Intern. Things J., vol. 5, no. 2, pp. 829–846, 2018
2018
-
[5]
Enabling optimization-based localization for IoT devices,
P. N. Beuchatet al., “Enabling optimization-based localization for IoT devices,”IEEE Intern. Things J., vol. 6, no. 3, pp. 5639–5650, 2019
2019
-
[6]
Survey of localization systems in internet of things,
K. F. Bradaiet al., “Survey of localization systems in internet of things,” Mobile Netw Appl, vol. 24, p. 761–785, 2019
2019
-
[7]
High-accuracy localization for assisted living: 5G systems will turn multipath channels from foe to friend,
K. Witrisalet al., “High-accuracy localization for assisted living: 5G systems will turn multipath channels from foe to friend,”IEEE Signal Process. Mag., vol. 33, no. 2, pp. 59–70, 2016
2016
-
[8]
Reconfigurable intelligent surfaces for 6G: Emerging hardware architectures, applications, and open challenges,
E. Basar, G. C. Alexandropoulos, Y . Liu, Q. Wu, S. Jin, C. Yuen, O. A. Dobre, and R. Schober, “Reconfigurable intelligent surfaces for 6G: Emerging hardware architectures, applications, and open challenges,” IEEE Veh. Technol. Mag., vol. 19, no. 3, pp. 27–47, 2024
2024
-
[9]
Reconfigurable intelligent surface aided wireless local- ization,
Y . Liuet al., “Reconfigurable intelligent surface aided wireless local- ization,” inProc. IEEE ICC, (Montreal, Canada), 2021
2021
-
[10]
Near-field localization with a reconfigurable intelligent surface acting as lens,
Z. Abu-Shabanet al., “Near-field localization with a reconfigurable intelligent surface acting as lens,” inProc. IEEE ICC, (Montreal, Canada), 2021
2021
-
[11]
Towards ubiquitous positioning by leveraging reconfig- urable intelligent surface,
H. Zhanget al., “Towards ubiquitous positioning by leveraging reconfig- urable intelligent surface,”IEEE Commun. Let, vol. 25, no. 1, pp. 284– 288, 2021
2021
-
[12]
Wireless fingerprinting localization in smart environments using reconfigurable intelligent surfaces,
C. L. Nguyenet al., “Wireless fingerprinting localization in smart environments using reconfigurable intelligent surfaces,”IEEE Access, vol. 9, pp. 135526–135541, 2021
2021
-
[13]
Leveraging RIS-enabled smart signal propagation for solving infeasible localization problems: Scenarios, key research directions, and open challenges,
K. Keykhosraviet al., “Leveraging RIS-enabled smart signal propagation for solving infeasible localization problems: Scenarios, key research directions, and open challenges,”IEEE Veh. Technol. Mag., vol. 18, no. 2, pp. 20–28, 2023
2023
-
[14]
RISs and sidelink communications in smart cities: The key to seamless localization and sensing,
H. Chenet al., “RISs and sidelink communications in smart cities: The key to seamless localization and sensing,”IEEE Commun. Mag., vol. 61, no. 8, pp. 140–146, 2023
2023
-
[15]
Reconfigurable intelligent surfaces for energy effi- ciency in wireless communication,
C. Huanget al., “Reconfigurable intelligent surfaces for energy effi- ciency in wireless communication,”IEEE Trans. Wireless Commun., vol. 18, no. 8, pp. 4157–4170, 2019
2019
-
[16]
Reconfigurable intelligent surfaces for rich scattering wireless communications: Recent experiments, chal- lenges, and opportunities,
G. C. Alexandropouloset al., “Reconfigurable intelligent surfaces for rich scattering wireless communications: Recent experiments, chal- lenges, and opportunities,”IEEE Commun. Mag., vol. 59, no. 6, pp. 28– 34, 2021
2021
-
[17]
Towards smart and reconfigurable environment: Intelligent reflecting surface aided wireless network,
Q. Wu and R. Zhang, “Towards smart and reconfigurable environment: Intelligent reflecting surface aided wireless network,”IEEE Commun. Mag., vol. 58, no. 1, pp. 106–112, 2020
2020
-
[18]
RIS-enabled smart wireless environ- ments: Deployment scenarios, network architecture, bandwidth and area of influence,
G. C. Alexandropouloset al., “RIS-enabled smart wireless environ- ments: Deployment scenarios, network architecture, bandwidth and area of influence,”EURASIP J. Wireless Commun. Netw., vol. 103, pp. 1–38, 2023
2023
-
[19]
Asymptotically optimal closed-form phase configuration of 1-bit RISs via sign alignment,
K. Stylianopouloset al., “Asymptotically optimal closed-form phase configuration of 1-bit RISs via sign alignment,” inProc. IEEE SPAWC, (Lucca, Italy), 2024
2024
-
[20]
Reconfigurable intelligent surface assisted multiuser MISO systems exploiting deep reinforcement learning,
C. Huanget al., “Reconfigurable intelligent surface assisted multiuser MISO systems exploiting deep reinforcement learning,”IEEE J. Sel. Areas Commun., vol. 38, no. 8, pp. 1839–1850, 2020
2020
-
[21]
Online RIS configu- ration learning for arbitrary large numbers of 1-bit phase resolution elements,
K. Stylianopoulos and G. C. Alexandropoulos, “Online RIS configu- ration learning for arbitrary large numbers of 1-bit phase resolution elements,” inProc. IEEE SPAWC, (Oulu, Finland), 2022
2022
-
[22]
Pervasive machine learning for smart radio environments enabled by reconfigurable intelligent surfaces,
G. C. Alexandropouloset al., “Pervasive machine learning for smart radio environments enabled by reconfigurable intelligent surfaces,”Proc. IEEE, vol. 110, no. 9, pp. 1494–1525, 2022
2022
-
[23]
Deep contextual bandits for orchestrating multi-user MISO systems with multiple RISs,
K. Stylianopouloset al., “Deep contextual bandits for orchestrating multi-user MISO systems with multiple RISs,” inProc. IEEE ICC, (Seoul, South Korea), 2022
2022
-
[24]
Evolving multi-branch attention convolutional neural networks for online RIS configuration,
G. Stamateliset al., “Evolving multi-branch attention convolutional neural networks for online RIS configuration,”IEEE Trans. Cogn. Commun. Netw., vol. 12, pp. 14–28, 2025
2025
-
[25]
Sequential design of experiments,
H. Chernoff, “Sequential design of experiments,”Ann. Math. Stat., vol. 30, no. 3, pp. 755–770, 1959
1959
-
[26]
Chernoff test for strong-or-weak radar models,
M. Franceschettiet al., “Chernoff test for strong-or-weak radar models,” IEEE Trans. Signal Process., vol. 65, no. 2, pp. 289–302, 2017
2017
-
[27]
Active hypothesis testing for anomaly detec- tion,
K. Cohen and Q. Zhao, “Active hypothesis testing for anomaly detec- tion,”IEEE Trans. Inf. Theory, vol. 61, no. 3, pp. 1432–1450, 2015
2015
-
[28]
Deep active learning approach to adaptive beamform- ing for mmWave initial alignment,
F. Sohrabiet al., “Deep active learning approach to adaptive beamform- ing for mmWave initial alignment,” inProc. IEEE ICASSP, (Toronto, Canada), 2021
2021
-
[29]
Active hypothesis testing in un- known environments using recurrent neural networks and model free reinforcement learning,
G. Stamatelis and N. Kalouptsidis, “Active hypothesis testing in un- known environments using recurrent neural networks and model free reinforcement learning,” inProc. EUSIPCO, (Helsinki, Finland), 2023
2023
-
[30]
Active sensing for communications by learning,
F. Sohrabiet al., “Active sensing for communications by learning,”IEEE J. Sel. Areas Commun, vol. 40, no. 6, pp. 1780–1794, 2022
2022
-
[31]
Single- and multi-agent private active sensing: A deep neuroevolution approach,
G. Stamateliset al., “Single- and multi-agent private active sensing: A deep neuroevolution approach,” inProc. IEEE ICC, (Denver, Colorado, USA), 2024
2024
-
[32]
Localization with reconfigurable intelligent surface: An active sensing approach,
Z. Zhanget al., “Localization with reconfigurable intelligent surface: An active sensing approach,”IEEE Trans. Wireless Commun., vol. 23, no. 7, pp. 7698–7711, 2024
2024
-
[33]
Long short-term memory,
S. Hochreiter and J. Schmidhuber, “Long short-term memory,”Neural Computation, vol. 9, no. 8, pp. 1735–1780, 1997
1997
-
[34]
Lagrangian deep learning for private RIS-aided localization: An active sensing approach,
G. Stamatelis and G. C. Alexandropoulos, “Lagrangian deep learning for private RIS-aided localization: An active sensing approach,” inProc. IEEE ICASSP, (Barcelona, Spain), 2026
2026
-
[35]
Reconfigurable intelligent surfaces for wireless commu- nications: Overview of hardware designs, channel models, and estima- tion techniques,
M. Jianet al., “Reconfigurable intelligent surfaces for wireless commu- nications: Overview of hardware designs, channel models, and estima- tion techniques,”Intell. Converg. Netw., vol. 3, no. 1, pp. 1–32, 2022
2022
-
[36]
MIMO communications with 1-bit RIS: Asymp- totic analysis and over-the-air channel diagonalization,
P. Gavriilidiset al., “MIMO communications with 1-bit RIS: Asymp- totic analysis and over-the-air channel diagonalization,” inProc. IEEE Asilomar, (Pacific Grove, USA), October 2025
2025
-
[37]
Wideband sub-THz reconfigurable intelligent surface using planar tightly coupled dipoles,
Y . Zhouet al., “Wideband sub-THz reconfigurable intelligent surface using planar tightly coupled dipoles,”IEEE Antennas and Wireless Propagation Letters, vol. 23, pp. 3659–3663, November 2024
2024
-
[38]
Energy conservation in wireless sensor networks: A survey,
G. Anastasiet al., “Energy conservation in wireless sensor networks: A survey,”Ad Hoc Netw., vol. 7, no. 3, pp. 537–568, 2009
2009
-
[39]
Energy-aware wireless microsensor networks,
V . Raghunathanet al., “Energy-aware wireless microsensor networks,” IEEE Signal Process. Mag., vol. 19, no. 2, pp. 40–50, 2002
2002
-
[40]
Wireless integrated network sensors,
G. J. Pottie and W. J. Kaiser, “Wireless integrated network sensors,” Commun. ACM, vol. 43, no. 5, p. 51–58, 2000
2000
-
[41]
Bayesian user localization and tracking for reconfig- urable intelligent surface aided MIMO systems,
B. Tenget al., “Bayesian user localization and tracking for reconfig- urable intelligent surface aided MIMO systems,”IEEE J. Sel. Top. Signal Process, vol. 16, no. 5, pp. 1040–1054, 2022
2022
-
[42]
Performance limit and phase design for near-field tracking with reconfigurable intelligent surface,
B. Wanget al., “Performance limit and phase design for near-field tracking with reconfigurable intelligent surface,”Digital Signal Process., vol. 167, p. 105426, 2025
2025
-
[43]
Multi-user tracking in reconfigurable intelligent surface aided near-field wireless communications system,
Y . Meiet al., “Multi-user tracking in reconfigurable intelligent surface aided near-field wireless communications system,”Appl. Sci., vol. 14, no. 1, 2024
2024
-
[44]
Yu and M
X. Yu and M. Gen,Introduction to Evolutionary Algorithms. Springer London, 2010
2010
-
[45]
Efficient reinforcement learning through symbiotic evolution,
D. E. Moriarty and R. Miikkulainen, “Efficient reinforcement learning through symbiotic evolution,”Mach. Learn., no. AI94-224, pp. 11–32, 1996
1996
-
[46]
Co-evolving recurrent neurons learn deep memory POMDPs,
F. J. Gomez and J. Schmidhuber, “Co-evolving recurrent neurons learn deep memory POMDPs,” inProc. GECCO, (Washington, DC, USA), 2005
2005
-
[47]
F. Petroskiet al., “Deep neuroevolution: Genetic algorithms are a com- petitive alternative for training deep neural networks for reinforcement learning,”arXiv preprint: 1712.06567, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[48]
Evolution Strategies as a Scalable Alternative to Reinforcement Learning
T. Salimanset al., “Evolution strategies as a scalable alternative to reinforcement learning,”arXiv preprint: 1703.03864, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[49]
Back to basics: Benchmarking canonical evolution strategies for playing atari,
P. Chrabaszczet al., “Back to basics: Benchmarking canonical evolution strategies for playing atari,” inProc. IJCAI, (Stockholm, Sweden), 2018
2018
-
[50]
Ultra-low power receivers for IoT applications: A review,
D. D. Wentzloffet al., “Ultra-low power receivers for IoT applications: A review,” inProc. IEEE CICC, (Virtual), 2020
2020
-
[51]
Ultra-low power wake-up radio for 5G IoT,
A. Froytloget al., “Ultra-low power wake-up radio for 5G IoT,”IEEE Commun. Mag., vol. 57, no. 3, pp. 111–117, 2019
2019
-
[52]
An approach to target tracking,
M. Gruber, “An approach to target tracking,” technical report, MIT Lincoln Laboratory, Lexington, MA, 1967
1967
-
[53]
Particle learning and smoothing,
C. M. Carvalhoet al., “Particle learning and smoothing,”Statistical Science, vol. 25, no. 1, pp. 88–106, 2010
2010
-
[54]
On the impact of control signaling in RIS- empowered wireless communications,
F. Saggeseet al., “On the impact of control signaling in RIS- empowered wireless communications,”IEEE Open J. Commun. Soc, vol. 5, pp. 4383–4399, 2024
2024
-
[55]
Analytic framework for the effective rate of MISO fading channels,
M. Matthaiouet al., “Analytic framework for the effective rate of MISO fading channels,”IEEE Trans. Commun., vol. 60, no. 6, pp. 1741–1751, 2012. 15
2012
-
[56]
Position aided beam alignment for millimeter wave backhaul systems with large phased arrays,
G. C. Alexandropoulos, “Position aided beam alignment for millimeter wave backhaul systems with large phased arrays,” inProc. IEEE CAMSAP, (Curacao, Dutch Antilles), 2017
2017
-
[57]
Noncoherent MIMO communications: Theoretical foundation, design approaches, and future challenges,
K.-H. Ngoet al., “Noncoherent MIMO communications: Theoretical foundation, design approaches, and future challenges,”IEEE Open J. Veh. Technol., vol. 7, pp. 381–401, 2026
2026
-
[58]
Near-field hierarchical beam management for RIS-enabled millimeter wave multi-antenna systems,
G. C. Alexandropouloset al., “Near-field hierarchical beam management for RIS-enabled millimeter wave multi-antenna systems,” inProc. IEEE SAM, (Trondheim, Norway), 2022
2022
-
[59]
Krishnamurthy,Partially Observed Markov Decision Processes: Fil- tering, Learning and Controlled Sensing
V . Krishnamurthy,Partially Observed Markov Decision Processes: Fil- tering, Learning and Controlled Sensing. Cambridge University Press, 2nd ed., 2025
2025
-
[60]
The complexity of Markov decision processes,
C. H. Papadimitriou and J. N. Tsitsiklis, “The complexity of Markov decision processes,”Math. Operat. Research, vol. 12, no. 3, pp. 441– 450, 1987
1987
-
[61]
The complexity of decentralized control of Markov decision processes,
D. S. Bernsteinet al., “The complexity of decentralized control of Markov decision processes,”Math. Operat. Research, vol. 27, no. 4, pp. 819–840, 2002
2002
-
[62]
NR; physical layer procedure for data (Release 15),
3GPP, “NR; physical layer procedure for data (Release 15),” 2017
2017
-
[63]
Accelerated neural evolution through cooperatively coevolved synapses,
F. Gomezet al., “Accelerated neural evolution through cooperatively coevolved synapses,”J. Mach. Learn. Res., vol. 9, no. 31, pp. 937–965, 2008
2008
-
[64]
Indoor path loss measurements and modeling in an open-space office at 2.4 ghz and 5.8 ghz in the presence of people,
S. Kaddouriet al., “Indoor path loss measurements and modeling in an open-space office at 2.4 ghz and 5.8 ghz in the presence of people,” in Proc. IEEE PIMRC, (Bologna, Italy), 2018
2018
-
[65]
Application of the extended Kalman filter to ballistic trajectory estimation,
R. E. Larsonet al., “Application of the extended Kalman filter to ballistic trajectory estimation,”Stanford Research Institute, Tech. Rep., 1967
1967
-
[66]
Sequential monte carlo methods under model uncer- tainty,
I. Urtcagaet al., “Sequential monte carlo methods under model uncer- tainty,” inProc. IEEE SSP, (Palma de Mallorca, Spain), 2016
2016
-
[67]
Asynchronous methods for deep reinforcement learning,
V . Mnihet al., “Asynchronous methods for deep reinforcement learning,” inProc. ICML, (NY , USA), 2016
2016
-
[68]
Benchmarking Batch Deep Reinforcement Learning Algorithms
A. Rayet al., “Benchmarking safe exploration in deep reinforcement learning,”arXiv preprint: 1910.01708, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1910
-
[69]
Stable-baselines3: Reliable reinforcement learning implementations,
A. Raffinet al., “Stable-baselines3: Reliable reinforcement learning implementations,”J. Mach. Learn. Research, vol. 22, no. 268, pp. 1–8, 2021
2021
-
[70]
Pygad: An intuitive genetic algorithm python library,
A. F. Gad, “Pygad: An intuitive genetic algorithm python library,” Multimedia Tools and Applications, pp. 1–14, 2023
2023
-
[71]
Active sensing for localization with reconfigurable intelligent surface,
Z. Zhanget al., “Active sensing for localization with reconfigurable intelligent surface,” inProc. IEEE ICC, (Rome, Italy), 2023
2023
-
[72]
Multi-agent actor-critic with harmonic annealing pruning for dynamic spectrum access systems,
G. Stamateliset al., “Multi-agent actor-critic with harmonic annealing pruning for dynamic spectrum access systems,” inProc. EUSIPCO, (Palermo, Italy), 2025
2025
-
[73]
KalmanNet: Neural network aided kalman filtering for partially known dynamics,
G. Revachet al., “KalmanNet: Neural network aided kalman filtering for partially known dynamics,”IEEE Trans. Signal Process., vol. 70, pp. 1532–1547, 2022
2022
-
[74]
Filtering Markov jump systems with partially known dynamics: A model-based deep learning approach,
G. Stamatelis and G. C. Alexandropoulos, “Filtering Markov jump systems with partially known dynamics: A model-based deep learning approach,”IEEE Trans. Signal Process., 2026 (to appear)
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.