FAST-LIVGO: A Degeneracy-Robust LiDAR-Inertial-Visual-GNSS Fusion Odometry
Pith reviewed 2026-06-26 20:31 UTC · model grok-4.3
The pith
A tightly coupled LiDAR-inertial-visual-GNSS system uses degeneracy detection to switch outlier rejection modes and adds Doppler plus time-differenced carrier phase constraints for drift-free long-range mapping.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The framework achieves lower accumulated drift and reduced map ghosting by tightly coupling LiDAR, inertial, visual, and GNSS measurements in an error-state iterated Kalman filter, using Doppler and time-differenced carrier phase observations for millimeter-level relative constraints without extra anchor states, and switching between LIVO-prior-guided and GNSS-aided outlier rejection according to measured LIVO degeneracy, with dynamic time warping handling spatiotemporal alignment under dynamic conditions.
What carries the argument
Degeneracy-aware dual-mode outlier rejection strategy that switches between LIVO-prior-guided rejection and GNSS-aided recovery according to the LIVO degeneracy level.
If this is right
- Long-term mapping remains consistent without drift accumulation even in geometrically degraded or textureless areas.
- Millimeter-level relative position fixes are available from GNSS without maintaining historical anchor states in the filter.
- The same filter produces usable state estimates when any single modality (LiDAR, vision, or GNSS) temporarily fails.
- Outlier rejection adapts automatically rather than relying on fixed thresholds that break in changing environments.
Where Pith is reading between the lines
- The switching logic could be extended to decide when to trust raw GNSS position fixes versus relative phase constraints in urban canyons.
- The online alignment module suggests a route to fuse additional asynchronous sensors such as wheel odometry or barometers without manual calibration.
- If degeneracy quantification generalizes, similar mode-switching could improve other multi-modal estimators that currently use static fusion weights.
Load-bearing premise
The LIVO degeneracy level can be measured accurately enough to choose the right rejection mode and the dynamic time warping alignment remains reliable at high speeds.
What would settle it
Run the system on a trajectory where LIVO degeneracy is deliberately misclassified and measure whether drift exceeds a non-switching GNSS-aided baseline on the same data.
Figures


read the original abstract
Robust state estimation and mapping in long-term, large-scale, and highly dynamic environments remains a key challenge in robotics. Existing LiDAR-Inertial-Visual Odometry (LIVO) systems achieve strong local accuracy but suffer from accumulated drift over long distances and may fail in geometrically degraded or textureless scenes. Meanwhile, GNSS-aided fusion frameworks often rely on LiDAR or visual odometry for state prediction and outlier rejection, making them vulnerable when odometry degenerates. To address these limitations, we propose a tightly coupled LiDAR-Inertial-Visual-GNSS fusion framework based on an Error-State Iterated Kalman Filter. An online spatiotemporal alignment module using Dynamic Time Warping is introduced for highly dynamic conditions. To better exploit GNSS precision, we develop observation models based on Doppler shifts and fixed-anchor Time-Differenced Carrier Phase, providing millimeter-level relative constraints without augmenting historical anchor states. We further design a degeneracy-aware dual-mode outlier rejection strategy that switches between LIVO-prior-guided rejection and GNSS-aided recovery according to the LIVO degeneracy level. Experiments on the public M3DGR dataset and a custom 20~m/s fixed-wing UAV dataset demonstrate that our system reduces accumulated drift and map ghosting, outperforming state-of-the-art methods in accuracy and robustness.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
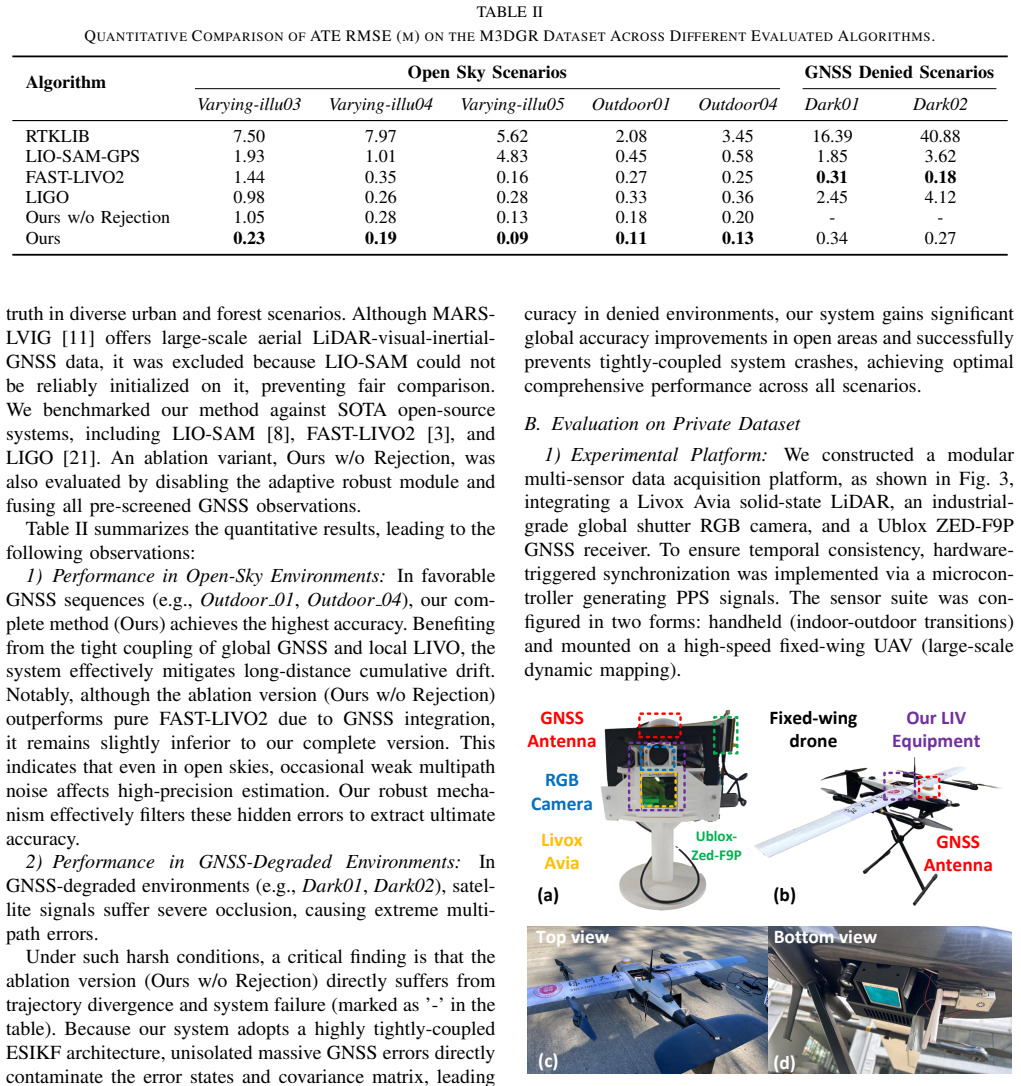
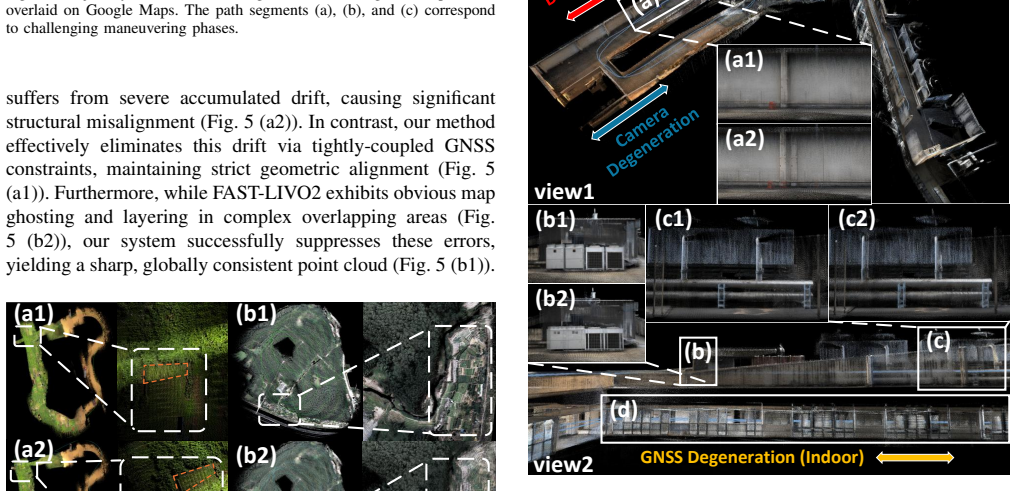
Summary. The paper proposes FAST-LIVGO, a tightly-coupled LiDAR-Inertial-Visual-GNSS odometry framework based on an Error-State Iterated Kalman Filter. It introduces an online spatiotemporal alignment module using Dynamic Time Warping for dynamic conditions, Doppler-shift and fixed-anchor Time-Differenced Carrier Phase observation models for millimeter-level relative constraints, and a degeneracy-aware dual-mode outlier rejection strategy that switches between LIVO-prior-guided rejection and GNSS-aided recovery according to the LIVO degeneracy level. Experiments on the M3DGR dataset and a custom 20 m/s fixed-wing UAV dataset are reported to show reduced accumulated drift, less map ghosting, and superior accuracy/robustness versus state-of-the-art methods.
Significance. If the degeneracy quantification and dual-mode switching are shown to function reliably, the framework would address a practical limitation in existing LIVO and GNSS-aided systems for long-term operation in geometrically degraded or highly dynamic scenes. The use of TDCP without augmenting historical states and the DTW alignment module are potentially useful technical contributions, but their impact cannot be assessed without explicit validation of the switching logic.
major comments (3)
- [Abstract and method description of dual-mode rejection] The central claim of improved robustness rests on the degeneracy-aware dual-mode outlier rejection, yet the manuscript supplies no explicit definition or formula for the 'LIVO degeneracy level' (e.g., eigenvalue ratio of the information matrix, covariance trace, or innovation statistic), no threshold value, and no ablation or failure-case analysis when the detector errs. This directly undermines the reported gains on both the M3DGR and 20 m/s UAV datasets.
- [Abstract and DTW alignment module] The online spatiotemporal alignment module is asserted to function correctly 'under highly dynamic conditions' using Dynamic Time Warping, but no quantitative validation, failure cases, or timing analysis at 20 m/s is provided; if DTW misaligns, the claimed advantage over prior LIVO or GNSS frameworks disappears.
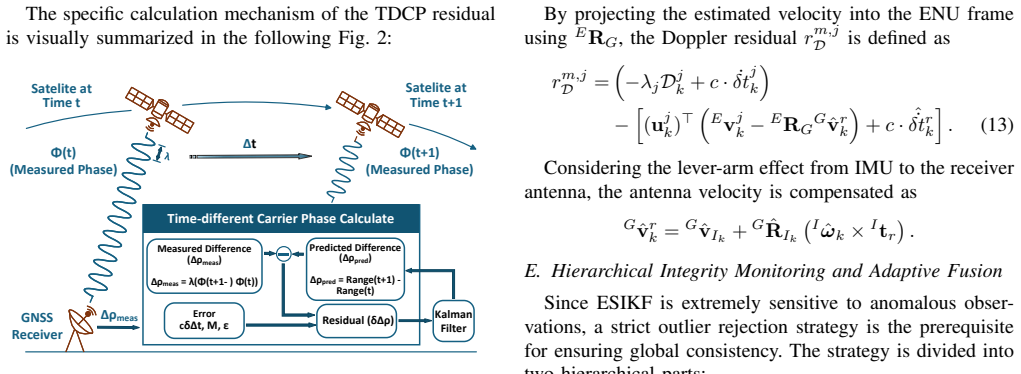
- [Observation models section] The Doppler and fixed-anchor TDCP observation models are stated to deliver millimeter-level relative constraints without augmenting historical anchor states, but the manuscript does not detail the linearization, covariance derivation, or how these models interact with the ESIKF update when LIVO degenerates.
minor comments (1)
- [Abstract] The abstract and experimental claims would benefit from explicit numerical results (e.g., absolute trajectory error values, drift rates) rather than qualitative statements about 'reduced accumulated drift'.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments on our manuscript. We address each major comment point by point below and will incorporate the requested clarifications and analyses in the revised version.
read point-by-point responses
-
Referee: [Abstract and method description of dual-mode rejection] The central claim of improved robustness rests on the degeneracy-aware dual-mode outlier rejection, yet the manuscript supplies no explicit definition or formula for the 'LIVO degeneracy level' (e.g., eigenvalue ratio of the information matrix, covariance trace, or innovation statistic), no threshold value, and no ablation or failure-case analysis when the detector errs. This directly undermines the reported gains on both the M3DGR and 20 m/s UAV datasets.
Authors: We acknowledge that the current manuscript does not supply an explicit formula or threshold for the LIVO degeneracy level, nor an ablation study of the switching logic. In the revision we will add a dedicated subsection that defines the degeneracy metric as the ratio of the smallest to largest eigenvalue of the LIVO information matrix, states the numerical threshold used, and presents an ablation study (including synthetic failure cases of the detector) on both datasets to demonstrate the contribution of the dual-mode strategy. revision: yes
-
Referee: [Abstract and DTW alignment module] The online spatiotemporal alignment module is asserted to function correctly 'under highly dynamic conditions' using Dynamic Time Warping, but no quantitative validation, failure cases, or timing analysis at 20 m/s is provided; if DTW misaligns, the claimed advantage over prior LIVO or GNSS frameworks disappears.
Authors: We agree that the manuscript currently lacks quantitative validation and timing results for the DTW module. The revision will include timing benchmarks, alignment-error statistics, and a discussion of failure modes (e.g., under rapid acceleration) evaluated on the 20 m/s UAV dataset, allowing readers to assess reliability under the claimed dynamic conditions. revision: yes
-
Referee: [Observation models section] The Doppler and fixed-anchor TDCP observation models are stated to deliver millimeter-level relative constraints without augmenting historical anchor states, but the manuscript does not detail the linearization, covariance derivation, or how these models interact with the ESIKF update when LIVO degenerates.
Authors: The observation-models section in the present manuscript is high-level and omits the requested derivations. We will expand it with the explicit linearization equations for both Doppler and fixed-anchor TDCP measurements, the corresponding covariance derivations, and a step-by-step description of their incorporation into the ESIKF update, highlighting the behavior when LIVO degeneracy is detected. revision: yes
Circularity Check
No significant circularity; claims rest on external dataset validation
full rationale
The paper presents a tightly-coupled LIVO-GNSS fusion system using an Error-State Iterated Kalman Filter, DTW-based alignment, Doppler/TDCP observations, and a degeneracy-aware dual-mode rejection strategy. All load-bearing claims (reduced drift, robustness in degenerate scenes) are justified by direct experimental comparison against SOTA methods on the independent public M3DGR dataset and a custom 20 m/s UAV dataset. No equations, parameters, or performance metrics are shown to be defined in terms of the result itself, fitted to a subset and then re-predicted, or justified solely by self-citation chains. The degeneracy level is invoked for mode switching but is not demonstrated to be self-referential or tautological by construction. This is a standard engineering contribution whose central results remain falsifiable against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Resilient Distributed Event-Triggered Joint Localization and Target Tracking for Coopera- tive Perception,
Y . Cui, C. Sheng, B. Min, B. Zhu, and M. Li, “Resilient Distributed Event-Triggered Joint Localization and Target Tracking for Coopera- tive Perception,”Automatica, vol. 191, pp. 113114, 2026
2026
-
[2]
CamV ox: A Low-cost and Accurate Lidar-assisted Visual SLAM System,
Y . Zhu, C. Zheng, C. Yuan, X. Huang, and X. Hong, “CamV ox: A Low-cost and Accurate Lidar-assisted Visual SLAM System,” inIEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 5049–5055
2021
-
[3]
FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry,
C. Zheng, W. Xu, Z. Zou, T. Hua, C. Yuan, D. He, B. Zhou, Z. Liu, J. Lin, F. Zhu, Y . Ren, R. Wang, F. Meng, and F. Zhang, “FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry,”IEEE Transactions on Robotics, vol. 41, pp. 326–346, 2025
2025
-
[4]
R3LIVE: A Robust, Real-time, RGB-colored, LiDAR-Inertial-Visual tightly-coupled state Estimation and mapping package,
J. Lin and F. Zhang, “R3LIVE: A Robust, Real-time, RGB-colored, LiDAR-Inertial-Visual tightly-coupled state Estimation and mapping package,” inIEEE International Conference on Robotics and Automa- tion (ICRA), 2022, pp. 10672-10678
2022
-
[5]
LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping,
T. Shan, B. Englot, C. Ratti, and D. Rus, “LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping,” inIEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 5692-5698
2021
-
[6]
VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator,
T. Qin, P. Li, and S. Shen, “VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator,”IEEE Transactions on Robotics, vol. 34, no. 2, pp. 1004-1020, 2018
2018
-
[7]
FAST- RTFM: Fast RGB–Thermal Fusion for Point Cloud Mapping in Low- Light Environments,
J. Xu, T. Ye, S. Shi, M. He, C. Zheng, T. Huang, and Y . Cui, “FAST- RTFM: Fast RGB–Thermal Fusion for Point Cloud Mapping in Low- Light Environments,”IEEE/ASME Transactions on Mechatronics, pp. 1–11, 2026, doi: 10.1109/TMECH.2026.3681437
-
[8]
LIO- SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping,
T. Shan, B. Englot, D. Meyers, W. Wang, C. Ratti, and D. Rus, “LIO- SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 5135-5142
2020
-
[9]
A General Optimisation-Based Framework for Global Pose Estimation With Multiple Sensors,
T. Qinet al., “A General Optimisation-Based Framework for Global Pose Estimation With Multiple Sensors,”IET Cyber-Syst. Robot., vol. 7, no. 1, Art. no. e70023, 2025
2025
-
[10]
Towards Robust Sensor-Fusion Ground SLAM: A Comprehensive Benchmark and a Resilient Framework,
D. Zhanget al., “Towards Robust Sensor-Fusion Ground SLAM: A Comprehensive Benchmark and a Resilient Framework,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS), pp. 8894–8901, 2025
2025
-
[11]
MARS- LVIG dataset: A multi-sensor aerial robots SLAM dataset for LiDAR- visual-inertial-GNSS fusion,
H. Li, Y . Zou, N. Chen, J. Lin, X. Liu, W. Xu, C. Zheng, R. Li, D. He, F. Kong, Y . Cai, Z. Liu, S. Zhou, K. Xue, and F. Zhang, “MARS- LVIG dataset: A multi-sensor aerial robots SLAM dataset for LiDAR- visual-inertial-GNSS fusion,”The International Journal of Robotics Research, vol. 43, no. 8, pp. 1114–1127, 2024
2024
-
[12]
R2LIVE: A Robust, Real- Time, LiDAR-Inertial-Visual Tightly-Coupled State Estimator and Mapping,
J. Lin, C. Zheng, W. Xu, and F. Zhang, “R2LIVE: A Robust, Real- Time, LiDAR-Inertial-Visual Tightly-Coupled State Estimator and Mapping,”IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7469-7476, 2021
2021
-
[13]
SVO: Fast semi-direct monocular visual odometry,
C. Forster, M. Pizzoli, and D. Scaramuzza, “SVO: Fast semi-direct monocular visual odometry,” inIEEE International Conference on Robotics and Automation (ICRA), 2014, pp. 15-22
2014
-
[14]
FAST-LIVO: Fast and Tightly-coupled Sparse-Direct LiDAR-Inertial-Visual Odom- etry,
C. Zheng, Q. Zhu, W. Xu, X. Liu, G. Guo, and F. Zhang, “FAST-LIVO: Fast and Tightly-coupled Sparse-Direct LiDAR-Inertial-Visual Odom- etry,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
2022
-
[15]
V oxelMap: A V oxel- based Efficient and Accurate LiDAR Odometry,
C. Yuan, W. Xu, X. Liu, X. Hong, and F. Zhang, “V oxelMap: A V oxel- based Efficient and Accurate LiDAR Odometry,” inIEEE International Conference on Robotics and Automation (ICRA), 2022
2022
-
[16]
V oxel-SLAM: A Complete, Accurate, and Versa- tile LiDAR-Inertial SLAM System,
Z. Liu, H. Li, C. Yuan, X. Liu, J. Lin, R. Li, C. Zheng, B. Zhou, W. Liu, and F. Zhang, “V oxel-SLAM: A Complete, Accurate, and Versa- tile LiDAR-Inertial SLAM System,”Advanced Intelligent Systems, p. e202501081, 2026
2026
-
[17]
Factor Graph Optimization for GNSS/INS Integration: A Comparison With the Extended Kalman Filter,
W. Wen, T. Pfeifer, X. Bai, and L. -T. Hsu, “Factor Graph Optimization for GNSS/INS Integration: A Comparison With the Extended Kalman Filter,”IEEE Transactions on Intelligent Transportation Systems, vol. 22, no. 5, pp. 3156-3171, 2021
2021
-
[18]
Graph-based sensor fusion of GNSS Doppler and carrier phase observations for precise vehicle localization,
T. Suzuki and N. Kubo, “Graph-based sensor fusion of GNSS Doppler and carrier phase observations for precise vehicle localization,”GPS Solutions, vol. 24, no. 4, pp. 1-13, 2020
2020
-
[19]
GVINS: Tightly Coupled GNSS–Visual–Inertial Fusion for Smooth and Consistent State Esti- mation,
S. Cao, X. Lu, and S. Shen, “GVINS: Tightly Coupled GNSS–Visual–Inertial Fusion for Smooth and Consistent State Esti- mation,”IEEE Transactions on Robotics, vol. 38, no. 4, pp. 2004-2021, 2022
2004
-
[20]
Tightly Coupled 3D Lidar Inertial Odom- etry and Mapping with GNSS,
H. Ye, Y . Chen, and M. Liu, “Tightly Coupled 3D Lidar Inertial Odom- etry and Mapping with GNSS,” inIEEE International Conference on Robotics and Automation (ICRA), 2020
2020
-
[21]
LIGO: A Tightly Coupled LiDAR- Inertial-GNSS Odometry Based on a Hierarchy Fusion Framework for Global Localization With Real-Time Mapping,
D. He, H. Li, and J. Yin, “LIGO: A Tightly Coupled LiDAR- Inertial-GNSS Odometry Based on a Hierarchy Fusion Framework for Global Localization With Real-Time Mapping,”IEEE Transactions on Robotics, vol. 41, pp. 1224–1244, 2025
2025
-
[22]
FAST-Calib: LiDAR-Camera Extrinsic Calibration in One Second,
C. Zheng and F. Zhang, “FAST-Calib: LiDAR-Camera Extrinsic Calibration in One Second,”IEEE Robotics and Automation Letter, pp. 1–5, 2026
2026
-
[23]
M ¨uller,Information Retrieval for Music and Motion
M. M ¨uller,Information Retrieval for Music and Motion. Springer, 2007
2007
-
[24]
Online Temporal Calibration for Monocular Visual-Inertial Systems,
T. Qin and S. Shen, “Online Temporal Calibration for Monocular Visual-Inertial Systems,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, pp. 3662-3669
2018
-
[25]
Indirect Kalman Filter for 3D Attitude Estimation,
N. Trawny and S. I. Roumeliotis, “Indirect Kalman Filter for 3D Attitude Estimation,”University of Minnesota, Dept. of Comp. Sci. & Eng., Tech. Rep. 2005-002, 2005
2005
-
[26]
Development of the low-cost RTK- GPS receiver with an open source program package RTKLIB,
T. Takasu and A. Yasuda, “Development of the low-cost RTK- GPS receiver with an open source program package RTKLIB,” in International Symposium on GPS/GNSS, 2009
2009
-
[27]
LOAM: Lidar Odometry and Mapping in Real-time,
J. Zhang and S. Singh, “LOAM: Lidar Odometry and Mapping in Real-time,” inRobotics: Science and Systems, vol. 2, no. 9, 2014
2014
-
[28]
FAST- LIVO2 on Resource-Constrained Platforms: LiDAR-Inertial-Visual Odometry With Efficient Memory and Computation,
B. Zhou, C. Zheng, Z. Wang, F. Zhu, Y . Cai, and F. Zhang, “FAST- LIVO2 on Resource-Constrained Platforms: LiDAR-Inertial-Visual Odometry With Efficient Memory and Computation,”IEEE Robotics and Automation Letters, vol. 10, no. 8, pp. 7931–7938, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.