Power-Budgeted Underwater Vehicle Control via Constrained Reinforcement Learning
Pith reviewed 2026-06-25 21:12 UTC · model grok-4.3
The pith
Formulating average thruster power as an explicit constraint in a reinforcement learning problem lets underwater vehicles meet tasks while using less energy without tuning reward weights for each vehicle or task.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
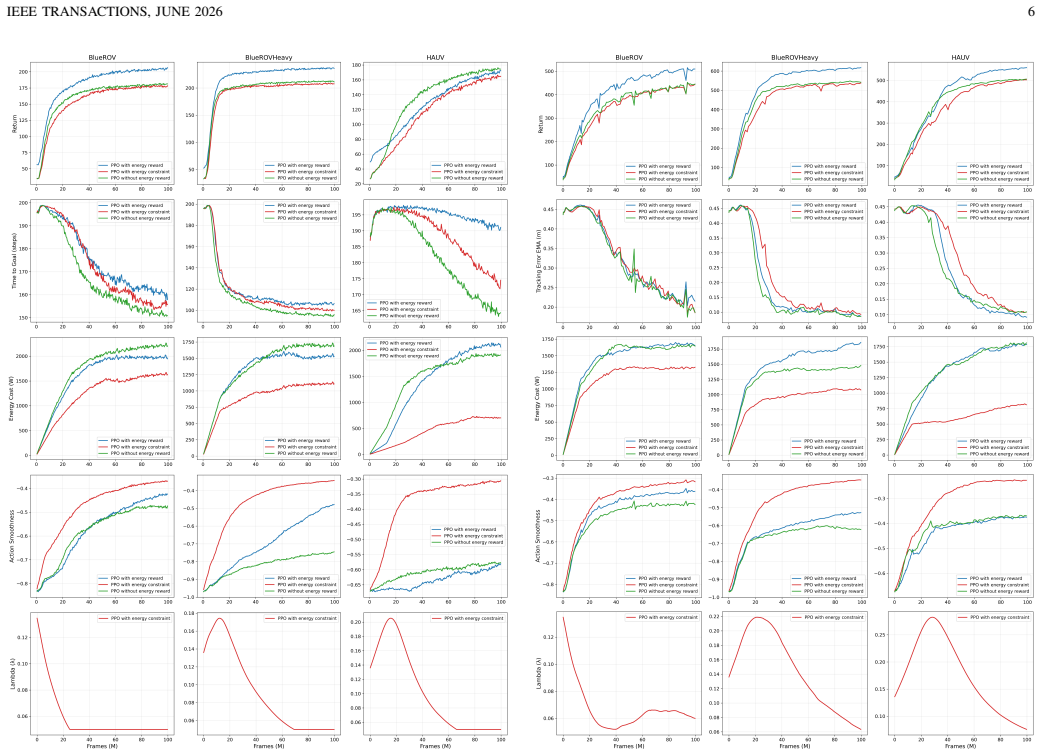
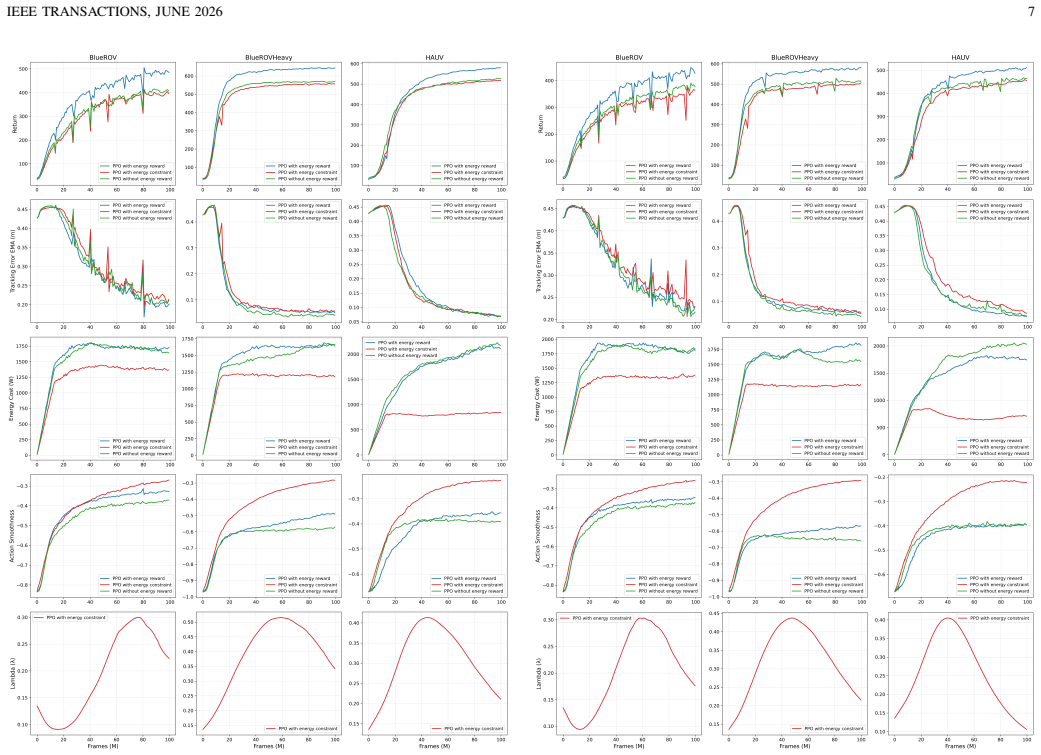
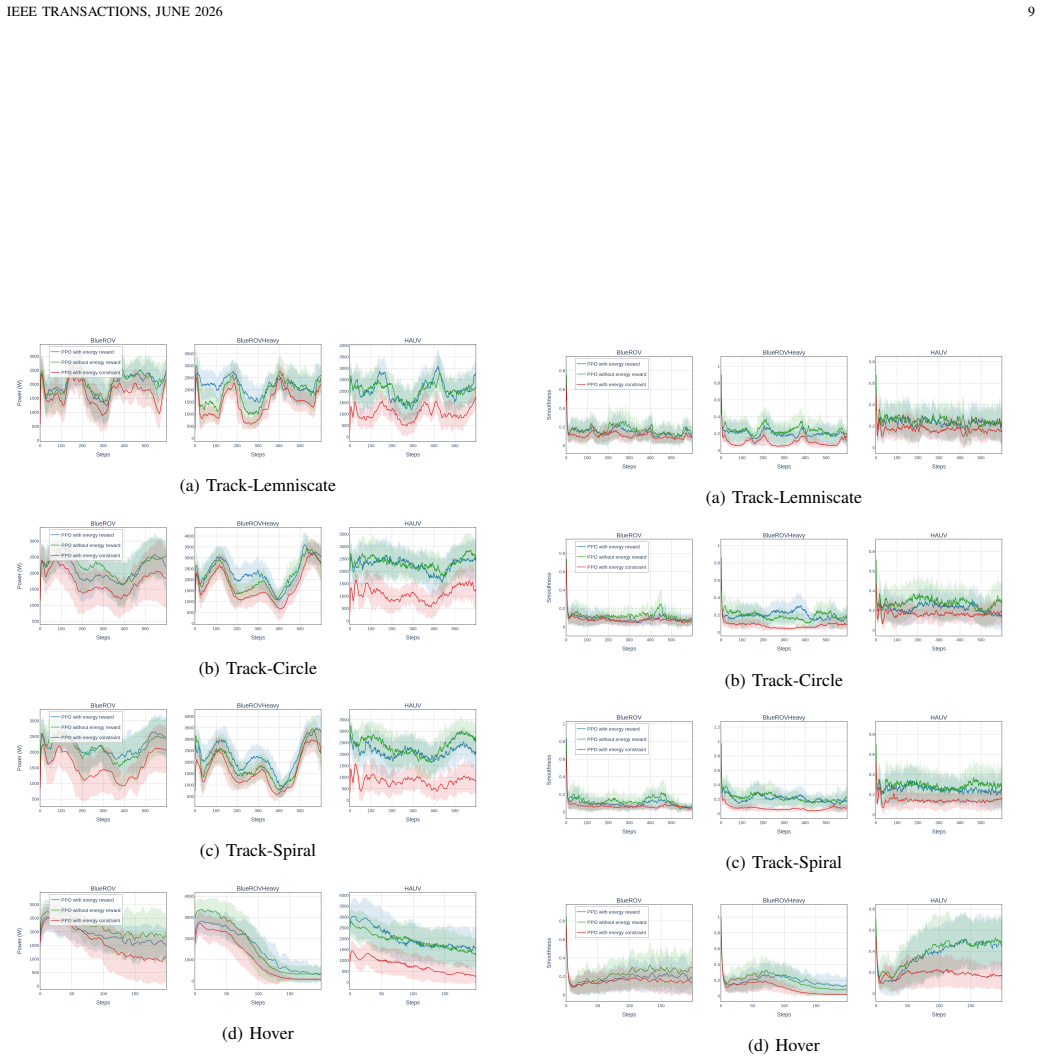
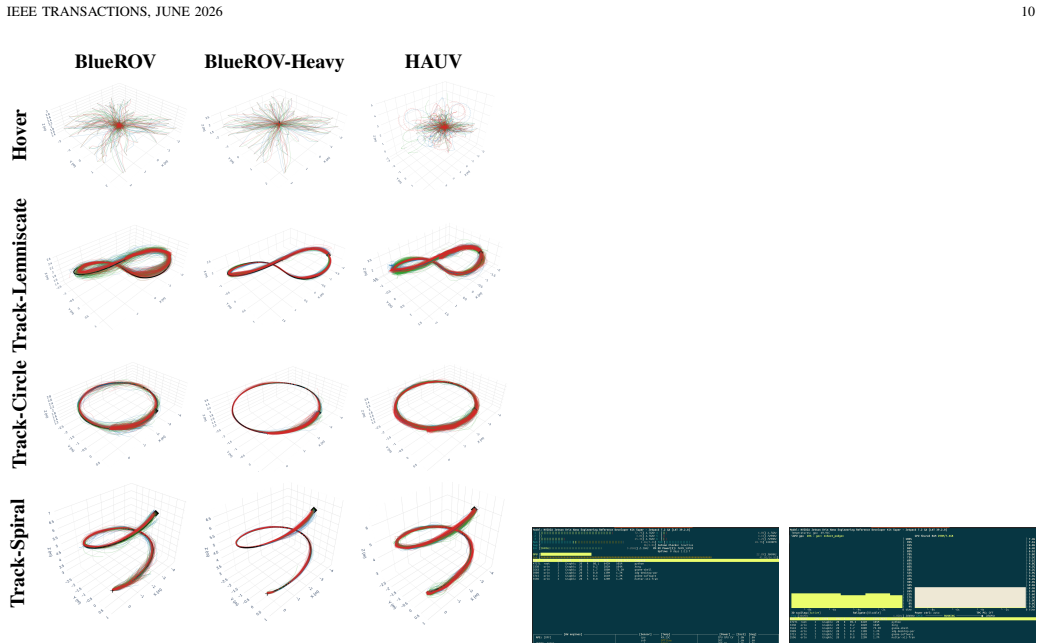
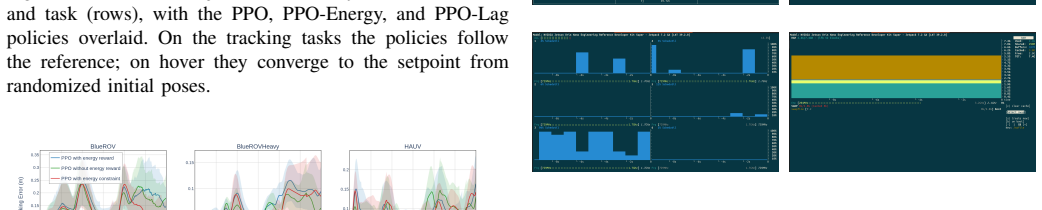
The paper formulates energy-efficient underwater control as a constrained Markov decision process in which average thruster power is subject to an explicit budget solved with a PPO-Lagrangian algorithm. The power level is set by declaring a budget in physical units, and a single dual variable is updated online to meet it for each vehicle and task without manual weight search. Across three vehicles and four tasks in simulation, the energy-constrained policy draws the least power in all twelve settings, reducing it by 14--65 percent over a task-only baseline and below an energy-reward baseline everywhere, while remaining the smoothest in ten settings and preserving task accuracy except in one
What carries the argument
PPO-Lagrangian algorithm that enforces an explicit average-thruster-power constraint inside a constrained Markov decision process via online dual-variable updates.
If this is right
- The constrained policy draws less power than both a task-only baseline and an energy-reward baseline in every tested vehicle-task pair.
- Task accuracy is preserved except when the declared power budget is set deliberately below the minimum needed for the task.
- The resulting control signals are the smoothest in ten of the twelve settings.
- A single dual-variable update replaces the need to search for a reward weight for each new vehicle or task.
Where Pith is reading between the lines
- The same explicit-constraint approach could be applied to other robotic platforms where a hard limit on consumption matters more than a tunable penalty term.
- Policies trained under the power constraint might transfer more readily across vehicles if the budget is expressed in the same physical units rather than a dimensionless weight.
- Extending the constraint from average power to total energy over a mission horizon would test whether the dual-variable method scales to cumulative budgets.
Load-bearing premise
The PPO-Lagrangian algorithm reliably enforces the explicit average-power constraint online while preserving task performance.
What would settle it
Deploying the same learned policies on physical underwater vehicles and measuring whether average power stays inside the declared budget while task error remains comparable to simulation results.
Figures

read the original abstract
Underwater vehicles operate from a fixed onboard energy budget that propulsion rapidly depletes, so a controller that completes its task while drawing less thruster power directly extends mission range and endurance. Reinforcement learning yields capable model-free controllers for station-keeping and trajectory tracking, but optimizing task accuracy alone drives the policy toward oscillatory, energy-wasting actuation. The established remedy subtracts an energy penalty from the reward, yet this sets the task-power trade-off through a single weight with no physical units: a target power level cannot be specified, the weight must be re-tuned for every vehicle and task, and a mismatched weight can even raise power. This paper instead formulates energy-efficient underwater control as a constrained Markov decision process in which average thruster power is subject to an explicit budget, solved with a PPO-Lagrangian algorithm. The power level is set by declaring a budget in physical units, and a single dual variable is updated online to meet it for each vehicle and task, without manual weight search. Across three vehicles and four tasks in the MarineGym simulator, the energy-constrained policy draws the least power in all twelve settings, reducing it by 14--65\% (up to 64.9\%) over a task-only baseline and below an energy-reward baseline everywhere, while remaining the smoothest in ten settings and preserving task accuracy except in one deliberately power-limited regime. Imposing energy as an explicit constraint thus offers a tuning-free route to energy-efficient underwater control that needs no per-vehicle, per-task weight search.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript formulates energy-efficient underwater vehicle control as a constrained MDP with an explicit average thruster power budget (in physical units) solved via PPO-Lagrangian. Across three vehicles and four tasks (12 settings) in the MarineGym simulator, the resulting policy is reported to consume the least power (14-65% reduction vs. task-only baseline, lower than energy-reward baseline), remain smoothest in ten settings, and preserve task accuracy except in one deliberately limited regime, providing a tuning-free alternative to reward shaping.
Significance. If the constraint enforcement holds, the explicit-budget formulation removes the need for per-vehicle/per-task weight tuning that plagues reward-penalty methods and supplies a physically interpretable control knob; this is a practical contribution for energy-limited marine robotics. The work correctly credits the standard CMDP/Lagrangian machinery and demonstrates it on multiple vehicle-task pairs rather than a single case.
major comments (2)
- [Abstract, results paragraph] Abstract (results paragraph): the central claim that PPO-Lagrangian 'reliably enforces the explicit average-power constraint online' while producing the reported 14-65% reductions is load-bearing, yet no constraint-violation rates, dual-variable trajectories, or per-episode budget adherence statistics are supplied; without these the observed power savings could arise from policies that occasionally violate the budget or from simulator-specific artifacts rather than from the CMDP solution.
- [Abstract, results paragraph] Abstract (results paragraph) and MarineGym evaluation: the claim of consistent enforcement across all twelve settings rests on simulator outcomes alone; no sensitivity to the Lagrangian dual-variable update rate (the sole free hyperparameter listed) or to random seeds is reported, leaving open whether the performance edge is robust or tied to particular hyperparameter choices.
minor comments (1)
- [Methods] Notation for the power budget and the dual variable should be introduced with explicit units and update rule in the methods section to make the 'tuning-free' claim immediately verifiable.
Simulated Author's Rebuttal
We thank the referee for the constructive comments and for recognizing the practical value of the explicit power-budget formulation. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract, results paragraph] Abstract (results paragraph): the central claim that PPO-Lagrangian 'reliably enforces the explicit average-power constraint online' while producing the reported 14-65% reductions is load-bearing, yet no constraint-violation rates, dual-variable trajectories, or per-episode budget adherence statistics are supplied; without these the observed power savings could arise from policies that occasionally violate the budget or from simulator-specific artifacts rather than from the CMDP solution.
Authors: We agree that direct evidence of constraint adherence would strengthen the central claim. The PPO-Lagrangian algorithm is intended to enforce the average-power constraint via dual ascent, and our reported policies meet the budgets in all twelve settings, but the manuscript does not include violation rates or dual trajectories. In the revision we will add per-episode power traces, dual-variable evolution plots, and aggregate violation statistics to demonstrate that the observed savings result from constraint satisfaction rather than occasional breaches. revision: yes
-
Referee: [Abstract, results paragraph] Abstract (results paragraph) and MarineGym evaluation: the claim of consistent enforcement across all twelve settings rests on simulator outcomes alone; no sensitivity to the Lagrangian dual-variable update rate (the sole free hyperparameter listed) or to random seeds is reported, leaving open whether the performance edge is robust or tied to particular hyperparameter choices.
Authors: Results are averaged over five independent random seeds per vehicle-task pair, with standard deviations provided in the supplementary tables (we will cite this explicitly in the main text). The dual update rate was fixed at a conventional value of 0.01. We acknowledge that a sensitivity study is absent and will include one in the revision, varying the rate by an order of magnitude in both directions across a subset of settings to confirm robustness. revision: yes
Circularity Check
Standard constrained RL with external budget; no reduction to inputs
full rationale
The paper formulates energy-efficient control as a constrained MDP with average thruster power as an explicit external budget (in physical units) and applies the standard PPO-Lagrangian algorithm whose dual-variable updates are taken from the established CMDP literature. Reported power reductions (14-65%) and smoothness comparisons are empirical outcomes from MarineGym simulations across 12 vehicle-task pairs, not quantities that reduce by construction to fitted constants, self-citations, or renamed ansatzes. The central claim therefore remains independent of the paper's own inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- Lagrangian dual-variable update rate
axioms (1)
- domain assumption Underwater vehicle dynamics and power consumption can be represented as a Markov decision process whose state includes position, velocity, and instantaneous power draw.
Reference graph
Works this paper leans on
-
[1]
Computer Vision: A Reference Guide , pages=
Pinhole camera model , author=. Computer Vision: A Reference Guide , pages=. 2021 , publisher=
2021
-
[2]
IEEE Transactions on Image Processing , volume=
A precision analysis of camera distortion models , author=. IEEE Transactions on Image Processing , volume=. 2017 , publisher=
2017
-
[3]
Proceedings of IEEE Conference on Computer Vision and Pattern Recognition , pages=
Self-calibration of the intrinsic parameters of cameras for active vision systems , author=. Proceedings of IEEE Conference on Computer Vision and Pattern Recognition , pages=. 1993 , organization=
1993
-
[4]
2007 IEEE Conference on Computer Vision and Pattern Recognition , pages=
Fast keypoint recognition in ten lines of code , author=. 2007 IEEE Conference on Computer Vision and Pattern Recognition , pages=. 2007 , organization=
2007
-
[5]
IEEE transactions on vehicular technology , volume=
A multi-sensor fusion positioning strategy for intelligent vehicles using global pose graph optimization , author=. IEEE transactions on vehicular technology , volume=. 2021 , publisher=
2021
-
[6]
Artificial Intelligence and Renewables Towards an Energy Transition 4 , pages=
Optical flow based on Lucas-Kanade method for motion estimation , author=. Artificial Intelligence and Renewables Towards an Energy Transition 4 , pages=. 2021 , organization=
2021
-
[7]
IEEE Transactions on Multimedia , volume=
Recurrent spatial pyramid CNN for optical flow estimation , author=. IEEE Transactions on Multimedia , volume=. 2018 , publisher=
2018
-
[8]
Proceedings 2000 International Conference on Image Processing (Cat
Optical flow estimation using forward-backward constraint equation , author=. Proceedings 2000 International Conference on Image Processing (Cat. No. 00CH37101) , volume=. 2000 , organization=
2000
-
[9]
2020 IEEE international conference on robotics and automation (ICRA) , pages=
Visual odometry revisited: What should be learnt? , author=. 2020 IEEE international conference on robotics and automation (ICRA) , pages=. 2020 , organization=
2020
-
[10]
IEEE Transactions on automatic control , volume=
The singular value decomposition: Its computation and some applications , author=. IEEE Transactions on automatic control , volume=. 1980 , publisher=
1980
-
[11]
IEEE transactions on pattern analysis and machine intelligence , volume=
An efficient solution to the five-point relative pose problem , author=. IEEE transactions on pattern analysis and machine intelligence , volume=. 2004 , publisher=
2004
-
[12]
Journal of Computer Vision , volume=
Performance evaluation of RANSAC family , author=. Journal of Computer Vision , volume=
-
[13]
IEEE Sensors Journal , volume=
Impact assessment of various IMU error sources on the relative accuracy of the GNSS/INS systems , author=. IEEE Sensors Journal , volume=. 2020 , publisher=
2020
-
[14]
IEEE Robotics and Automation Letters , volume=
Deep imu bias inference for robust visual-inertial odometry with factor graphs , author=. IEEE Robotics and Automation Letters , volume=. 2022 , publisher=
2022
-
[15]
IEEE Transactions on Neural Systems and Rehabilitation Engineering , volume=
A probability distribution model-based approach for foot placement prediction in the early swing phase with a wearable imu sensor , author=. IEEE Transactions on Neural Systems and Rehabilitation Engineering , volume=. 2021 , publisher=
2021
-
[16]
IEEE transactions on robotics , volume=
Vins-mono: A robust and versatile monocular visual-inertial state estimator , author=. IEEE transactions on robotics , volume=. 2018 , publisher=
2018
-
[17]
IEEE Transactions on Robotics , volume=
GVINS: Tightly coupled GNSS--visual--inertial fusion for smooth and consistent state estimation , author=. IEEE Transactions on Robotics , volume=. 2022 , publisher=
2022
-
[18]
IEEE International Conference on Robotics and Automation , volume=
g2o: A general framework for graph optimization , author=. IEEE International Conference on Robotics and Automation , volume=
-
[19]
IEEE Transactions on Intelligent Transportation Systems , volume=
Robust localization in map changing environments based on hierarchical approach of sliding window optimization and filtering , author=. IEEE Transactions on Intelligent Transportation Systems , volume=. 2020 , publisher=
2020
-
[20]
University of Southern California, Tech
Sliding window filters for SLAM , author=. University of Southern California, Tech. Rep , year=
-
[21]
2011 IEEE intelligent vehicles symposium (IV) , pages=
Precise timestamping and temporal synchronization in multi-sensor fusion , author=. 2011 IEEE intelligent vehicles symposium (IV) , pages=. 2011 , organization=
2011
-
[22]
The International Journal of Robotics Research , volume=
Vision meets robotics: The kitti dataset , author=. The International Journal of Robotics Research , volume=. 2013 , publisher=
2013
-
[23]
Space Science Reviews , volume=
Magnetic coordinate systems , author=. Space Science Reviews , volume=. 2017 , publisher=
2017
-
[24]
IEEE Transactions on Vehicular Technology , volume=
An integrated GNSS/UWB/DR/VMM positioning strategy for intelligent vehicles , author=. IEEE Transactions on Vehicular Technology , volume=. 2020 , publisher=
2020
-
[25]
Journal of Traffic and Transportation Engineering , volume=
Two-stage UWB positioning algorithm of intelligent vehicle , author=. Journal of Traffic and Transportation Engineering , volume=. 2021 , publisher=
2021
-
[26]
Sensors , volume=
Research on a simulation method of the millimeter wave radar virtual test environment for intelligent driving , author=. Sensors , volume=. 2020 , publisher=
2020
-
[27]
arXiv preprint arXiv:1901.03642 , year=
A general optimization-based framework for global pose estimation with multiple sensors , author=. arXiv preprint arXiv:1901.03642 , year=
Pith/arXiv arXiv 1901
-
[28]
2014 , school=
A Ceres solver based bundle adjustment module , author=. 2014 , school=
2014
-
[29]
Proceedings of the 13th international technical meeting of the satellite division of the institute of navigation (ION GPS 2000) , pages=
Multi-base RTK positioning using virtual reference stations , author=. Proceedings of the 13th international technical meeting of the satellite division of the institute of navigation (ION GPS 2000) , pages=
2000
-
[30]
IEEE transactions on robotics , volume=
ORB-SLAM: a versatile and accurate monocular SLAM system , author=. IEEE transactions on robotics , volume=. 2015 , publisher=
2015
-
[31]
IEEE robotics & automation magazine , volume=
Visual odometry [tutorial] , author=. IEEE robotics & automation magazine , volume=. 2011 , publisher=
2011
-
[32]
IEEE Sensors Journal , volume=
A high-precision and low-cost IMU-based indoor pedestrian positioning technique , author=. IEEE Sensors Journal , volume=. 2020 , publisher=
2020
-
[33]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
LiDAR positioning for indoor precision navigation , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , pages=
-
[34]
2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) , pages=
A radio frequency identification system for accurate indoor localization , author=. 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) , pages=. 2011 , organization=
2011
-
[35]
IEEE Internet of Things Journal , volume=
Improving GPS code phase positioning accuracy in urban environments using machine learning , author=. IEEE Internet of Things Journal , volume=. 2020 , publisher=
2020
-
[36]
IEEE Transactions on Industrial Electronics , volume=
Ceiling-based visual positioning for an indoor mobile robot with monocular vision , author=. IEEE Transactions on Industrial Electronics , volume=. 2009 , publisher=
2009
-
[37]
IEEE Transactions on Instrumentation and Measurement , volume=
Distributed indoor positioning system with inertial measurements and map matching , author=. IEEE Transactions on Instrumentation and Measurement , volume=. 2014 , publisher=
2014
-
[38]
IEEE Transactions on Intelligent Transportation Systems , volume=
In-car positioning and navigation technologies—A survey , author=. IEEE Transactions on Intelligent Transportation Systems , volume=. 2009 , publisher=
2009
-
[39]
GPS Solutions , volume=
Absolute positioning with single-frequency GPS receivers , author=. GPS Solutions , volume=. 2002 , publisher=
2002
-
[40]
Transportation research part C: emerging technologies , volume=
Evaluation of GPS-based methods of relative positioning for automotive safety applications , author=. Transportation research part C: emerging technologies , volume=. 2012 , publisher=
2012
-
[41]
2013 IEEE/RSJ international conference on intelligent robots and systems , pages=
A robust and modular multi-sensor fusion approach applied to MAV navigation , author=. 2013 IEEE/RSJ international conference on intelligent robots and systems , pages=. 2013 , organization=
2013
-
[42]
IEEE Sensors Journal , volume=
Robust State Estimation via Maximum Correntropy EKF on Matrix Lie Groups With Application to Low-Cost INS/GPS-Integrated Navigation System , author=. IEEE Sensors Journal , volume=. 2023 , publisher=
2023
-
[43]
Journal of Multivariate Analysis , volume=
Robust regression function estimation , author=. Journal of Multivariate Analysis , volume=. 1984 , publisher=
1984
-
[44]
A survey of ranging techniques for vehicle localization in intelligence transportation system: challenges and opportunities , author=. Int. J. Electr. Comput. Eng , volume=
-
[45]
IEEE Transactions on Intelligent Vehicles , year=
Cooperative localization in transportation 5.0 , author=. IEEE Transactions on Intelligent Vehicles , year=
-
[46]
Nature machine intelligence , volume=
Deep learning-based robust positioning for all-weather autonomous driving , author=. Nature machine intelligence , volume=. 2022 , publisher=
2022
-
[47]
2011 , publisher=
Handbook of Marine Craft Hydrodynamics and Motion Control , author=. 2011 , publisher=
2011
-
[48]
arXiv preprint arXiv:1707.06347 , year=
Proximal Policy Optimization Algorithms , author=. arXiv preprint arXiv:1707.06347 , year=
-
[49]
1999 , publisher=
Constrained Markov Decision Processes , author=. 1999 , publisher=
1999
-
[50]
International Conference on Machine Learning (ICML) , pages=
Constrained Policy Optimization , author=. International Conference on Machine Learning (ICML) , pages=
-
[51]
arXiv preprint arXiv:1910.01708 , year=
Benchmarking Safe Exploration in Deep Reinforcement Learning , author=. arXiv preprint arXiv:1910.01708 , year=
Pith/arXiv arXiv 1910
-
[52]
International Conference on Machine Learning (ICML) , pages=
Responsive Safety in Reinforcement Learning by PID Lagrangian Methods , author=. International Conference on Machine Learning (ICML) , pages=
-
[53]
arXiv preprint arXiv:2108.10470 , year=
Isaac Gym: High Performance GPU-Based Physics Simulation for Robot Learning , author=. arXiv preprint arXiv:2108.10470 , year=
-
[54]
2024 , howpublished=
2024
-
[55]
Robotics and Autonomous Systems , volume=
Adaptive Low-Level Control of Autonomous Underwater Vehicles Using Deep Reinforcement Learning , author=. Robotics and Autonomous Systems , volume=. 2018 , publisher=
2018
-
[56]
Proceedings of the OCEANS Conference , year=
Deep Reinforcement Learning for Energy-Efficient Motion Control of Underwater Vehicles , author=. Proceedings of the OCEANS Conference , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.