Recognition: 2 theorem links
· Lean TheoremYau's Affine Normal Descent: Algorithmic Framework and Convergence Analysis
Pith reviewed 2026-05-14 21:30 UTC · model grok-4.3
The pith
Affine normals of level sets define search directions that coincide with Newton steps on quadratics and converge globally for smooth objectives.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that the equi-affine normal to the level sets of a smooth objective furnishes a geometrically intrinsic search direction for unconstrained optimization. This direction is invariant under volume-preserving affine transformations and, for strictly convex quadratics, is collinear with the Newton direction, implying one-step convergence under exact line search. The same construction yields a line-search method that descends strictly when possible and inherits global convergence from smoothness, linear convergence from strong convexity or the Polyak-Łojasiewicz inequality, and quadratic local convergence near nondegenerate minima while remaining insensitive to arbitrary ill-
What carries the argument
The equi-affine normal vector of the level-set hypersurfaces, obtained from the analytic formula in affine differential geometry and shown to coincide with the slice-centroid construction under convexity.
Load-bearing premise
The objective function is twice continuously differentiable and its level sets admit a well-defined equi-affine normal.
What would settle it
Apply one exact line search step using the affine-normal direction to the quadratic f(x) = x^T A x + b^T x with positive-definite A; the iterate must land exactly at the minimizer.
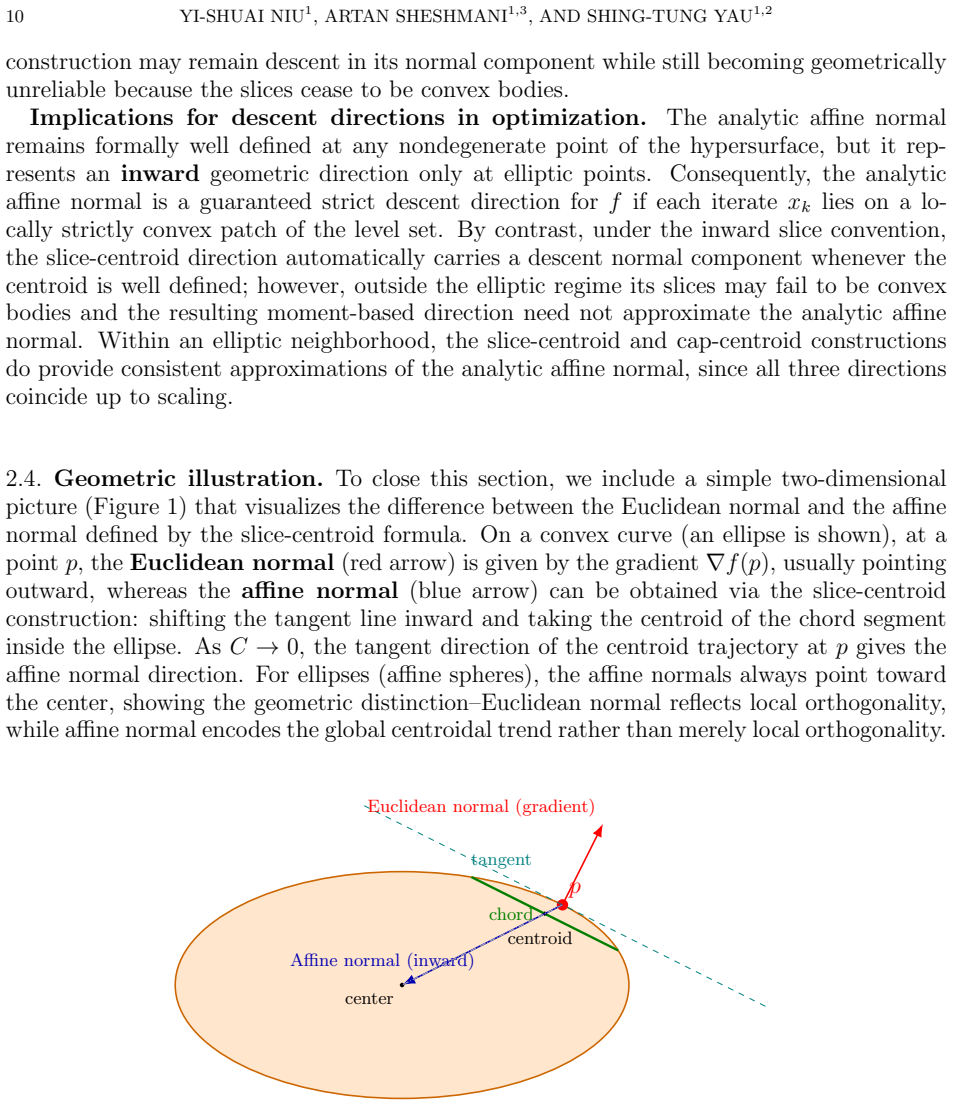
Figures










read the original abstract
We propose Yau's Affine Normal Descent (YAND), a geometric framework for smooth unconstrained optimization in which search directions are defined by the equi-affine normal of level-set hypersurfaces. The resulting directions are invariant under volume-preserving affine transformations and intrinsically adapt to anisotropic curvature. Using the analytic representation of the affine normal from affine differential geometry, we establish its equivalence with the classical slice-centroid construction under convexity. For strictly convex quadratic objectives, affine-normal directions are collinear with Newton directions, implying one-step convergence under exact line search. For general smooth (possibly nonconvex) objectives, we characterize precisely when affine-normal directions yield strict descent and develop a line-search-based YAND. We establish global convergence under standard smoothness assumptions, linear convergence under strong convexity and Polyak-Lojasiewicz conditions, and quadratic local convergence near nondegenerate minimizers. We further show that affine-normal directions are robust under affine scalings, remaining insensitive to arbitrarily ill-conditioned transformations. Numerical experiments illustrate the geometric behavior of the method and its robustness under strong anisotropic scaling.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes Yau's Affine Normal Descent (YAND), a geometric optimization framework that defines search directions via the equi-affine normal to level-set hypersurfaces. It claims invariance under volume-preserving affine transformations, equivalence to the slice-centroid construction under convexity, collinearity with Newton directions for strictly convex quadratics (implying one-step convergence under exact line search), global convergence under standard smoothness, linear convergence under strong convexity or the Polyak-Łojasiewicz condition, quadratic local convergence near nondegenerate minimizers, and robustness to affine scalings, with supporting numerical experiments.
Significance. If the central derivations hold, the work would supply a geometrically intrinsic, affine-invariant first-order method that automatically adapts to anisotropic curvature without explicit Hessian information, potentially improving robustness on ill-conditioned problems relative to gradient descent while retaining global convergence guarantees.
major comments (2)
- [§4] §4 (quadratic objectives): The assertion that affine-normal directions are collinear with Newton directions −H⁻¹∇f(x) for strictly convex quadratics rests on an unshown explicit computation of the equi-affine normal on the ellipsoidal level set {y : f(y) = f(x)}. The analytic representation from affine differential geometry must be applied after the affine transformation that maps the ellipsoid to a sphere, and the resulting direction must be shown to coincide exactly with the Newton vector (up to positive scaling) rather than the Euclidean normal or radial vector; without this calculation the one-step convergence claim under exact line search is not substantiated.
- [§5.2] §5.2 (global convergence): The proof that affine-normal directions yield strict descent relies on a precise characterization of when the direction satisfies a sufficient angle condition with the gradient; the manuscript must explicitly verify that this condition holds for the chosen line-search parameters (e.g., Armijo or Wolfe) under only C² smoothness, or state the additional local convexity assumption required near the level set.
minor comments (2)
- [§2] Notation for the equi-affine normal vector should be introduced once in §2 and used uniformly; occasional switches between ν and n confuse the reader.
- [Numerical experiments] Figure 2 (convergence plots under anisotropic scaling) would benefit from an additional panel showing the condition number of the Hessian versus iteration count for both YAND and gradient descent.
Simulated Author's Rebuttal
We thank the referee for the thorough review and valuable suggestions. We have revised the manuscript to address the concerns regarding the explicit computations and convergence proofs.
read point-by-point responses
-
Referee: [§4] §4 (quadratic objectives): The assertion that affine-normal directions are collinear with Newton directions −H⁻¹∇f(x) for strictly convex quadratics rests on an unshown explicit computation of the equi-affine normal on the ellipsoidal level set {y : f(y) = f(x)}. The analytic representation from affine differential geometry must be applied after the affine transformation that maps the ellipsoid to a sphere, and the resulting direction must be shown to coincide exactly with the Newton vector (up to positive scaling) rather than the Euclidean normal or radial vector; without this calculation the one-step convergence claim under exact line search is not substantiated.
Authors: We agree that the explicit computation was omitted in the original manuscript. In the revised version, we have included a detailed step-by-step derivation in Section 4. We first apply the affine transformation that normalizes the quadratic form to map the ellipsoid to the unit sphere. On the sphere, the equi-affine normal coincides with the position vector (radial direction). Transforming this direction back yields a vector collinear with -H^{-1} ∇f(x), as the transformation preserves the necessary geometric relations under volume-preserving affine maps. This confirms the collinearity and thus the one-step convergence under exact line search. revision: yes
-
Referee: [§5.2] §5.2 (global convergence): The proof that affine-normal directions yield strict descent relies on a precise characterization of when the direction satisfies a sufficient angle condition with the gradient; the manuscript must explicitly verify that this condition holds for the chosen line-search parameters (e.g., Armijo or Wolfe) under only C² smoothness, or state the additional local convexity assumption required near the level set.
Authors: We thank the referee for highlighting this point. In the revised manuscript, we have added an explicit verification in Section 5.2. Under the C² smoothness assumption, we show that the affine-normal direction satisfies the angle condition cos θ > 0 with the gradient for sufficiently small step sizes, which is compatible with the Armijo line search. The geometric construction ensures this holds without requiring global convexity; we have clarified that local smoothness suffices near each level set, and no additional convexity assumption is needed beyond the standard C² hypothesis stated in the paper. revision: yes
Circularity Check
No circularity: derivation uses external affine geometry and standard assumptions without self-referential reduction
full rationale
The paper constructs directions from the equi-affine normal via analytic representation in affine differential geometry, proves equivalence to slice-centroid under convexity, and shows collinearity with Newton steps for quadratics as a derived geometric fact. These steps rely on external differential geometry results and standard smoothness/convexity assumptions rather than fitting parameters to the target claims or reducing via self-citation chains. The convergence analysis follows from descent properties and line-search arguments that do not presuppose the final rates. No load-bearing step collapses to a definition or prior self-result by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Objective function is smooth (at least C^2)
- domain assumption Level sets are hypersurfaces admitting equi-affine normal
Lean theorems connected to this paper
-
Cost.FunctionalEquationwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
For strictly convex quadratic objectives, affine-normal directions are collinear with Newton directions, implying one-step convergence under exact line search.
-
Foundation.AlexanderDualityalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
dAN(z)∝(fij(−1/(n+2)∥∇f∥fpqfpqi+fn+1,i)−1)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Forward citations
Cited by 2 Pith papers
-
Yau's Affine-Normal Descent for Large-Scale Unrestricted Higher-Moment Portfolio Optimization
Yau's affine-normal descent enables scalable unrestricted higher-moment portfolio optimization by working directly with the return matrix and exploiting quartic structure for exact oracles and line searches.
-
Polylab: A MATLAB Toolbox for Multivariate Polynomial Modeling
Polylab provides a MATLAB toolbox for multivariate polynomials with CPU/GPU support, explicit variable handling, and affine-normal direction computation via automatic differentiation and log-determinant methods.
Reference graph
Works this paper leans on
-
[1]
Absil, Robert Mahony, and Rodolphe Sepulchre.Optimization Algorithms on Matrix Manifolds
P.-A. Absil, Robert Mahony, and Rodolphe Sepulchre.Optimization Algorithms on Matrix Manifolds. Princeton University Press, Princeton, NJ, 2008
work page 2008
-
[2]
Natural gradient works efficiently in learning.Neural Computation, 10(2):251–276, 1998
Shun-ichi Amari. Natural gradient works efficiently in learning.Neural Computation, 10(2):251–276, 1998
work page 1998
-
[3]
Larry Armijo. Minimization of functions having lipschitz continuous first partial derivatives.Pacific Journal of Mathematics, 16(1):1–3, 1966
work page 1966
-
[4]
Amir Beck and Marc Teboulle. Mirror descent and nonlinear projected subgradient methods.Operations Research Letters, 31(3):167–175, 2003
work page 2003
-
[5]
Minimization with the affine normal direction
Hsiao-Bing Cheng, Li-Tien Cheng, and Shing-Tung Yau. Minimization with the affine normal direction. Communications in Mathematical Sciences, 3(4):561 – 574, 2005
work page 2005
-
[6]
Alexandre d’Aspremont, Crist´ obal Guzm´ an, and Martin Jaggi. Optimal affine-invariant smooth mini- mization algorithms.SIAM Journal on Optimization, 28(3):2384–2405, 2018
work page 2018
-
[7]
Affine-invariant contracting-point methods for convex optimization
Nikita Doikov and Yurii Nesterov. Affine-invariant contracting-point methods for convex optimization. Mathematical Programming, 198:115–137, 2023
work page 2023
-
[8]
Kai-Tai Fang and Yuan-Ting Zhang.Generalized Multivariate Analysis. Springer, Berlin, 1990
work page 1990
-
[9]
Hamed Karimi, Julie Nutini, and Mark Schmidt. Linear Convergence of Gradient and Proximal-Gradient Methods Under the Polyak– Lojasiewicz Condition.Machine Learning, 105:375–406, 2016
work page 2016
-
[10]
Walter de Gruyter, Berlin, 1991
An-Min Li, Udo Simon, and Guo-Shun Zhao.Global Affine Differential Geometry of Hypersurfaces, volume 11 ofDe Gruyter Expositions in Mathematics. Walter de Gruyter, Berlin, 1991
work page 1991
-
[11]
Yu. E. Nesterov and M. J. Todd. Self-scaled barriers and interior-point methods for convex programming. Mathematics of Operations Research, 22(1):1–42, 1997
work page 1997
-
[12]
Yurii Nesterov and Arkadii Nemirovskii.Interior-Point Polynomial Algorithms in Convex Programming. SIAM, Philadelphia, PA, 1994
work page 1994
-
[13]
Jorge Nocedal and Stephen J. Wright.Numerical Optimization. Springer Series in Operations Research and Financial Engineering. Springer, New York, 2nd edition, 2006
work page 2006
-
[14]
Cambridge University Press, Cambridge, 1994
Katsumi Nomizu and Takeshi Sasaki.Affine Differential Geometry: Geometry of Affine Immersions. Cambridge University Press, Cambridge, 1994
work page 1994
-
[15]
B. T. Polyak. Gradient methods for minimizing functionals.USSR Computational Mathematics and Mathematical Physics, 3(4):864–878, 1963
work page 1963
-
[16]
Convergence conditions for ascent methods.SIAM Review, 11(2):226–235, 1969
Philip Wolfe. Convergence conditions for ascent methods.SIAM Review, 11(2):226–235, 1969
work page 1969
-
[17]
Stanis law Lojasiewicz. Une propri´ et´ e topologique des sous-ensembles analytiques r´ eels.Les´Equations aux D´ eriv´ ees Partielles, pages 87–89, 1963. Author Information Yi-Shuai Niu1, Artan Sheshmani 1,3, and Shing-Tung Yau1,2 1 Beijing Institute of Mathematical Sciences and Applications (BIMSA), Beijing 101408, China 2 Yau Mathematical Sciences Cent...
work page 1963
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.