Edge-Based QoS-Aware Adaptive Task Placement: A Closed-Loop Control in Multi-Robot Systems
Pith reviewed 2026-06-28 18:00 UTC · model grok-4.3
The pith
QoS-aware adaptive task placement controller reduces deadline violations and tail latency by dynamically switching placements in edge multi-robot systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
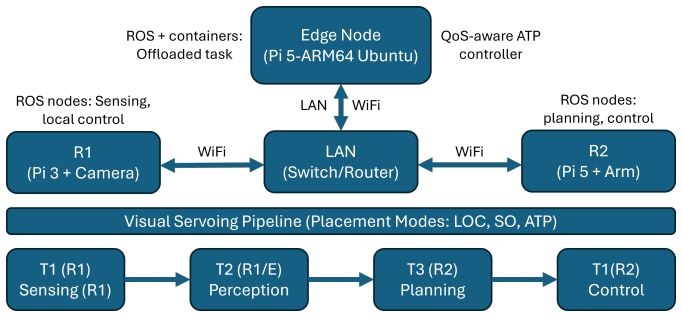
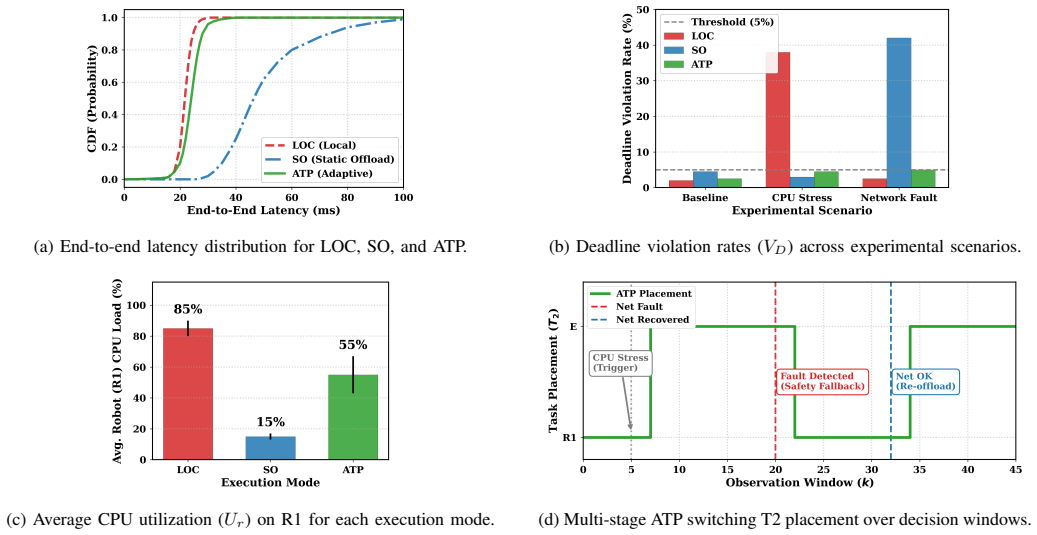
In a Raspberry Pi testbed running a camera-to-manipulator pipeline with sub-millisecond synchronization and network emulation, the QoS-aware ATP controller that switches task placement on measured latency and utilization thresholds lowers deadline violations and tail latency relative to both local execution and static edge offloading under compute-stress and network-fault conditions.
What carries the argument
The QoS-aware Adaptive Task Placement (ATP) controller, which computes a multi-metric cost over fixed two-second windows and triggers placement switches on latency and utilization thresholds.
If this is right
- Static edge offloading reduces onboard CPU load but increases tail latency and deadline misses.
- Threshold-based switching on measured latency and utilization improves QoS metrics in stressed conditions.
- ATP functions as a practical edge-side control primitive for time-sensitive multi-robot workloads.
- The approach supplies design guidelines for cloud-edge robotics deployments in industrial cyber-physical systems.
Where Pith is reading between the lines
- The same closed-loop scoring could be applied to other shared edge workloads that face variable network jitter.
- Fixed windows and thresholds may need retuning when task pipelines or hardware change.
- The results point toward combining ATP with predictive models to anticipate contention before violations occur.
Load-bearing premise
The chosen multi-metric cost, two-second windows, and switching thresholds will deliver QoS gains outside the specific camera-to-manipulator pipeline and Raspberry Pi hardware.
What would settle it
An experiment on different edge hardware or a different robotic task pipeline in which the ATP controller produces equal or higher deadline violations than static offloading.
Figures
read the original abstract
Multi-robot systems (MRS) increasingly offload compute-intensive perception tasks to edge nodes to meet strict time-sensitive Quality-of-Service (QoS) constraints. However, static task orchestration on a shared edge node can severely degrade QoS due to network latency, jitter, and edge-resource contention. We present a pilot edge-centric MRS testbed using Raspberry Pi nodes to evaluate a camera-to-manipulator pipeline under three modes: local execution, static offloading, and a QoS-aware Adaptive Task Placement (ATP) controller. ATP scores candidate placements using a multi-metric cost (normalized latency, CPU utilization, and switching overhead) over two-second control windows. The closed-loop visual servoing testbed is instrumented with sub-millisecond clock synchronization, network emulation, and detailed monitoring of multiple metrics across nodes to capture realistic jitter. Experimental results under compute-stress and network-fault scenarios show that static edge offloading reduces on-board CPU load but amplifies tail latency and deadline misses. In contrast, the QoS-aware ATP controller, by switching task placement based on measured latency and utilization thresholds, consistently lowers deadline violations and tail latency. Overall, the results position ATP as a practical edge-side control primitive for MRS and concrete design guidelines for Cloud-Edge Robotics deployments within the broader cloud-fog automation, while motivating QoS-aware multi-objective workload orchestration for industrial cyber-physical systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a pilot edge-centric multi-robot systems testbed on Raspberry Pi nodes evaluating a camera-to-manipulator pipeline under local execution, static edge offloading, and a QoS-aware Adaptive Task Placement (ATP) controller. ATP scores placements via a multi-metric cost (normalized latency, CPU utilization, switching overhead) over fixed 2-second windows and switches based on measured thresholds; experiments under compute-stress and network-fault scenarios show ATP reduces deadline violations and tail latency relative to static offloading.
Significance. If the results hold, the work supplies a concrete, hardware-instrumented demonstration that closed-loop adaptation can mitigate QoS degradation from static offloading in edge robotics under contention. The use of direct sub-millisecond measurements on a real testbed (rather than simulation or fitted models) and the explicit multi-metric cost are strengths that could serve as a starting point for Cloud-Edge Robotics design guidelines.
major comments (2)
- [Abstract] Abstract: the positioning of ATP as a 'practical edge-side control primitive' and source of 'concrete design guidelines for Cloud-Edge Robotics deployments' rests on the assumption that the chosen 2 s window, latency/utilization thresholds, and cost weights generalize; all reported evidence is confined to one camera-to-manipulator pipeline on Raspberry Pi nodes under two stress scenarios, with no sensitivity analysis on these free parameters described.
- [Abstract] Experimental results (as summarized in abstract): exact weights in the multi-metric cost, precise threshold values triggering placement switches, and any statistical details (e.g., number of runs, variance) are absent, so it is not possible to determine whether the observed QoS gains are robust properties of the controller or artifacts of the specific parameter choices and narrow test regime.
minor comments (1)
- [Abstract] Abstract: the phrase 'closed-loop visual servoing testbed' appears without prior definition or reference to the instrumentation details that follow.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the scope and reproducibility aspects of our pilot study. We address each major comment below and will revise the manuscript accordingly to clarify limitations and provide missing details.
read point-by-point responses
-
Referee: [Abstract] Abstract: the positioning of ATP as a 'practical edge-side control primitive' and source of 'concrete design guidelines for Cloud-Edge Robotics deployments' rests on the assumption that the chosen 2 s window, latency/utilization thresholds, and cost weights generalize; all reported evidence is confined to one camera-to-manipulator pipeline on Raspberry Pi nodes under two stress scenarios, with no sensitivity analysis on these free parameters described.
Authors: The manuscript is framed as a pilot testbed evaluation on a specific pipeline and hardware platform. The abstract language is intended to indicate the demonstrated potential of closed-loop adaptation rather than broad claims of generalizability. We agree that the absence of sensitivity analysis limits stronger positioning and will revise the abstract and add a dedicated discussion of parameter selection rationale and study limitations in the revised version. revision: partial
-
Referee: [Abstract] Experimental results (as summarized in abstract): exact weights in the multi-metric cost, precise threshold values triggering placement switches, and any statistical details (e.g., number of runs, variance) are absent, so it is not possible to determine whether the observed QoS gains are robust properties of the controller or artifacts of the specific parameter choices and narrow test regime.
Authors: We will update the abstract and results section to explicitly state the cost-function weights, threshold values, number of runs, and variance measures from the experiments. These details are present in the experimental methodology but will be highlighted earlier for clarity and to support assessment of result robustness. revision: yes
Circularity Check
No circularity; results are direct empirical measurements on testbed
full rationale
The paper reports experimental outcomes from a Raspberry Pi multi-robot testbed under compute-stress and network-fault scenarios. The QoS-aware ATP controller is evaluated by measuring latency, utilization, deadline violations, and tail latency in three modes (local, static offload, adaptive). No derivation chain, equations, fitted parameters renamed as predictions, or self-citation of uniqueness theorems is present; the multi-metric cost function is used as an implemented heuristic whose performance is assessed by direct instrumentation rather than by construction from its own inputs.
Axiom & Free-Parameter Ledger
free parameters (2)
- control window duration =
2 seconds
- latency and utilization thresholds
axioms (1)
- domain assumption A linear combination of normalized latency, CPU utilization, and switching overhead forms a suitable proxy for QoS
Reference graph
Works this paper leans on
-
[1]
A. 2025 , pages =. doi:10.1109/TSC.2025.3539197 , journal =
-
[2]
A. IEEE Trans. Autom. Sci. Eng. , author =. 2015 , pages =. doi:10.1109/TASE.2014.2376492 , number =
-
[3]
Resource. IEEE Commun. Surv. Tutor. , author =. 2021 , pages =. doi:10.1109/COMST.2021.3061435 , number =
-
[4]
A. IEEE Trans. Intell. Transp. Syst. , author =. 2024 , pages =. doi:10.1109/TITS.2024.3438165 , number =
-
[5]
Network offloading policies for cloud robotics: a learning-based approach , volume =. Auton. Robots , author =. 2021 , pages =. doi:10.1007/s10514-021-09987-4 , number =
-
[6]
A. IEEE Commun. Surv. Tutor. , author =. 2017 , pages =. doi:10.1109/COMST.2017.2745201 , number =
-
[7]
A. 2022 , pages =. doi:10.1109/ACCESS.2022.3152787 , journal =
-
[8]
Task offloading strategies for mobile edge computing:
Dong, Shi and Tang, Junxiao and Abbas, Khushnood and Hou, Ruizhe and Kamruzzaman, Joarder and Rutkowski, Leszek and Buyya, Rajkumar , month = dec, year =. Task offloading strategies for mobile edge computing:. doi:10.1016/j.comnet.2024.110791 , journal =
-
[9]
Edge. J. Sens. Actuator Netw. , author =. 2025 , keywords =. doi:10.3390/jsan14040065 , number =
-
[10]
doi:10.1109/TCE.2023.3238655 , journal =
2023 , pages =. doi:10.1109/TCE.2023.3238655 , journal =
-
[11]
Low-. Sensors , author =. 2025 , keywords =. doi:10.3390/s25154666 , number =
-
[12]
arXiv preprint arXiv:2506.18024 , author =
Leveraging. arXiv preprint arXiv:2506.18024 , author =
-
[13]
Leveraging Cloud-Fog Automation for Autonomous Collision Detection and Classification in Intelligent Unmanned Surface Vehicles , year=
Tran, Thien and Nguyen, Quang and Kua, Jonathan and Tran, Minh and Luu, Toan and Hoang, Thuong and Jin, Jiong , booktitle=. Leveraging Cloud-Fog Automation for Autonomous Collision Detection and Classification in Intelligent Unmanned Surface Vehicles , year=
-
[14]
Empirical Evaluation of a 5G Transparent Clock for Time Synchronization in a TSN-5G Network , year=
Caleya-Sanchez, Julia and Muñoz, Pablo and Sánchez-Garrido, Jorge and Florentín, Emilio and Delgado-Ferro, Felix and Rodriguez-Martin, Pablo and Ameigeiras, Pablo , booktitle=. Empirical Evaluation of a 5G Transparent Clock for Time Synchronization in a TSN-5G Network , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.