Permissive Safety Through Trusted Inference: Verifiable Belief-Space Neural Safety Filters for Assured Interactive Robotics
Pith reviewed 2026-06-28 14:08 UTC · model grok-4.3
The pith
Restricting conformal prediction to reliable belief regions certifies less conservative safety filters for interactive robots.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By focusing verification on a region in belief space where runtime inference is expected to be reliable, conformal prediction can certify a substantially less conservative neural approximation of a belief-space safety filter while preserving the simplicity and sample complexity of the standard conformal procedure and explicitly handling inference errors.
What carries the argument
Trusted inference region: a subset of belief space chosen so that runtime inference reliability holds inside it, allowing conformal prediction to certify the safety filter without extra error terms from outside the region.
If this is right
- The certified safety filter can be deployed with neural approximations in high-dimensional belief spaces without the full-space conservativeness of standard conformal methods.
- Safety guarantees remain valid while the robot actively reduces uncertainty online through inference.
- The method applies directly to modular safety filters that separate safety from task performance in human-robot settings.
- Verification cost stays comparable to ordinary conformal prediction because the sample complexity is unchanged.
Where Pith is reading between the lines
- The same region-restriction idea could be tested in other domains that combine conformal prediction with learned models whose accuracy varies by input region.
- If the reliable region itself can be updated online from new data, the filter might become even less conservative over time.
- The technique suggests a general pattern for making safety certificates less conservative whenever partial reliability of an inference module can be identified in advance.
Load-bearing premise
There exists a well-defined region in belief space inside which the robot's runtime inference module is reliable enough that the conformal safety guarantee holds without additional error terms.
What would settle it
A simulation or hardware trial in which the robot operates inside the claimed reliable belief region yet the safety filter still violates the certified probability bound at a rate higher than the conformal guarantee predicts.
Figures

read the original abstract
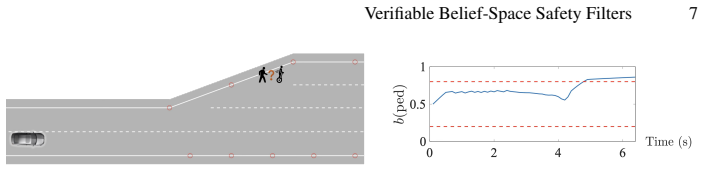
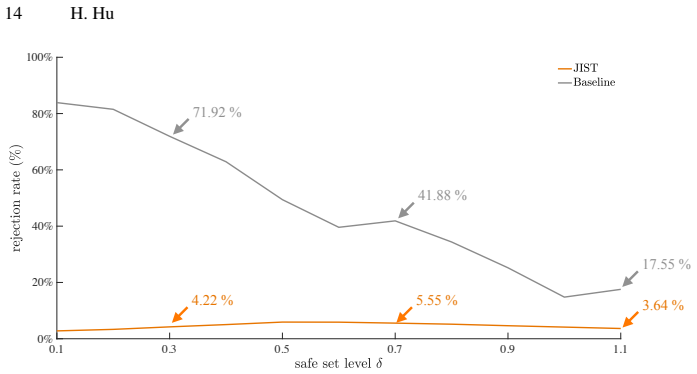
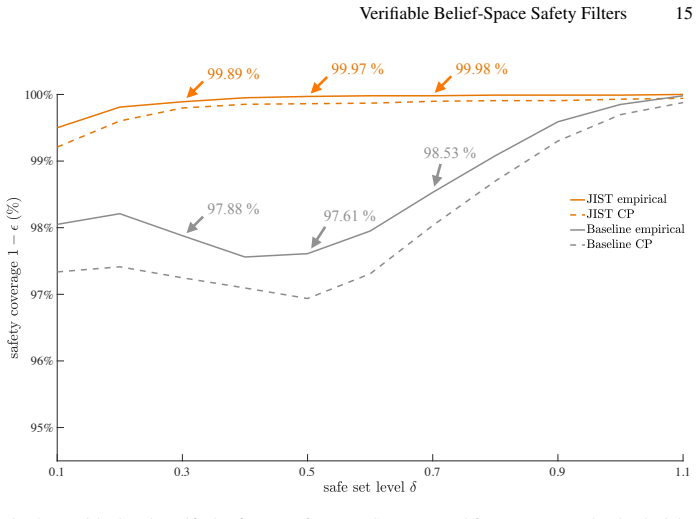
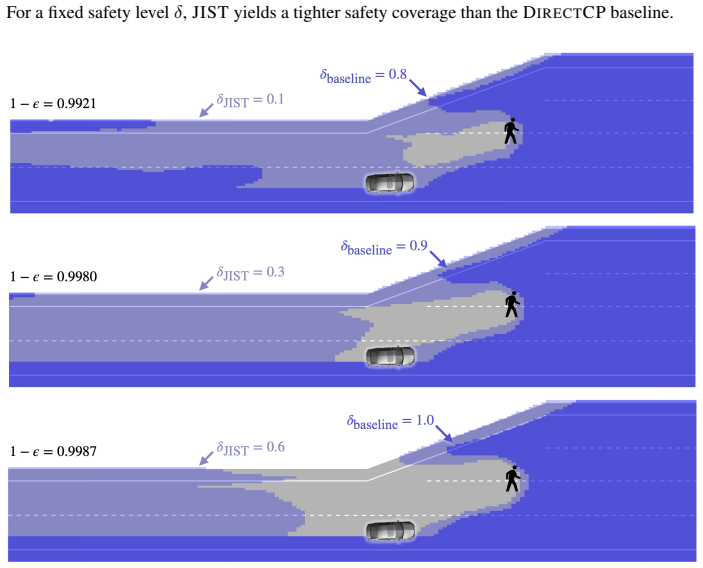
Autonomous robots that interact with people must make safe and efficient decisions under human-induced uncertainty, such as their preferences, goals, competency, and willingness to cooperate. Safety filters are a popular approach for ensuring safety in interactive robotics, since their modular design separates safety from performance, allowing robots to operate safely around people with minimal impact on task efficiency. While traditional safety filters typically operate only in the physical space, neglecting the robot's ability to learn and adapt online, the recently proposed belief-space safety filter (BeliefSF) reasons about robot safety in closed-loop with runtime inference that actively reduces the robot's uncertainty online, thereby reducing conservativeness in filtering. However, providing formal safety guarantees for robots deploying BeliefSF remains a significant challenge due to errors in runtime inference and neural approximation of safety filters required to handle the high dimensionality of belief spaces. In this paper, we propose an algorithmic approach to certify high-probability safety of BeliefSF using conformal prediction, while explicitly accounting for the reliability of the robot's runtime inference module. Our method leverages the structure of belief-space safety filtering by focusing verification on a region where inference is expected to be reliable. It preserves the simplicity and sample complexity of standard conformal prediction, yet can certify a substantially less conservative safety filter. Through a simulated human-vehicle interaction benchmark, we show that our approach verifies a significantly more permissive belief-space safety filter than a standard conformal prediction baseline.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to introduce a conformal-prediction certification procedure for belief-space safety filters (BeliefSF) that restricts the calibration set to a region of belief space in which the runtime inference module is expected to be reliable; this restriction is asserted to yield high-probability safety guarantees while producing substantially less conservative filters than standard conformal prediction, all while preserving the original sample complexity, and the claim is supported by a simulated human-vehicle interaction benchmark.
Significance. If the formal coverage guarantee can be established, the result would allow modular safety filters in interactive robotics to exploit online inference without sacrificing certifiable safety, thereby reducing unnecessary conservatism in human-robot settings.
major comments (2)
- [Abstract] Abstract: the central claim that restricting conformal prediction to the 'region where inference is expected to be reliable' yields a high-probability safety certificate without additional error terms is load-bearing; the abstract invokes this premise directly but supplies neither an independent formal definition of the region nor a bound on the conditional coverage gap induced by the restriction, so it is unclear whether the guarantee follows from standard conformal prediction.
- [Method] Method description (inferred from abstract): if the boundary of the reliable-inference region is itself determined by the same neural approximation or inference module whose errors are being mitigated, the construction risks circularity; any theorem must therefore either treat the region as an oracle or prove that selection error is absorbed without inflating the failure probability.
minor comments (1)
- The abstract states the benchmark outcome but does not report quantitative coverage frequencies or error bounds; adding these numbers would strengthen the empirical section without altering the central claim.
Simulated Author's Rebuttal
We thank the referee for the careful reading and insightful comments on the formal aspects of our conformal certification procedure. We address each major comment below with clarifications drawn from the full manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that restricting conformal prediction to the 'region where inference is expected to be reliable' yields a high-probability safety certificate without additional error terms is load-bearing; the abstract invokes this premise directly but supplies neither an independent formal definition of the region nor a bound on the conditional coverage gap induced by the restriction, so it is unclear whether the guarantee follows from standard conformal prediction.
Authors: The abstract is concise by design, but the full manuscript supplies the missing elements. Section 3 formally defines the reliable-inference region R as the set of beliefs b for which an offline validation procedure (using a held-out dataset disjoint from calibration) certifies that the inference module's error is bounded by a fixed ε. Theorem 1 in Section 4 then applies standard conformal prediction directly on calibration data restricted to R and proves that the resulting safety filter satisfies the usual 1-α coverage guarantee with no additive error terms; the restriction simply ensures the exchangeability assumption holds conditionally on b ∈ R, so the overall certificate remains high-probability whenever the robot operates inside the trusted region. revision: partial
-
Referee: [Method] Method description (inferred from abstract): if the boundary of the reliable-inference region is itself determined by the same neural approximation or inference module whose errors are being mitigated, the construction risks circularity; any theorem must therefore either treat the region as an oracle or prove that selection error is absorbed without inflating the failure probability.
Authors: The region boundary is computed entirely offline on a separate validation set and does not depend on the runtime inference module or its online outputs, eliminating circularity. Theorem 1 therefore treats R as a fixed, oracle-like set for the purpose of the proof; any offline selection error is absorbed into the validation step and does not propagate into the online coverage probability, preserving the standard conformal guarantee without inflation. revision: no
Circularity Check
No circularity; certification extends conformal prediction without self-definition or load-bearing self-citation
full rationale
The paper's central claim applies standard conformal prediction to a restricted belief-space region where inference reliability is assumed, without any quoted equation or step that defines the safety certificate in terms of parameters fitted from the same data or renames a fitted quantity as a prediction. No self-citation chain is invoked to justify uniqueness or an ansatz; the method is presented as preserving the sample complexity of existing conformal prediction while adding a structural restriction. This is a normal, non-circular extension of an externally established technique, warranting only a minor score for the implicit assumption on the region.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Conformal prediction yields valid finite-sample coverage under exchangeability of calibration and test points
- domain assumption A region exists in belief space where the runtime inference module produces sufficiently accurate beliefs for the safety certificate to hold
Reference graph
Works this paper leans on
-
[1]
IEEE Transactions on Automatic Control63(3), 630–642 (2017)
Ahn, H., Del Vecchio, D.: Safety verification and control for collision avoidance at road intersections. IEEE Transactions on Automatic Control63(3), 630–642 (2017)
2017
-
[2]
IEEE Transactions on Robotics30(4), 903–918 (2014)
Althoff, M., Dolan, J.M.: Online verification of automated road vehicles using reachabil- ity analysis. IEEE Transactions on Robotics30(4), 903–918 (2014). https://doi.org/10.1109/ TRO.2014.2312453 Verifiable Belief-Space Safety Filters 17
arXiv 2014
-
[3]
Ames, A.D., Xu, X., Grizzle, J.W., Tabuada, P.: Control barrier function based quadratic programs for safety critical systems. IEEE Transactions on Automatic Control62(8), 3861– 3876 (2017). https://doi.org/10.1109/TAC.2016.2638961
-
[4]
Founda- tions and Trends® in Machine Learning16(4), 494–591 (2023)
Angelopoulos, A.N., Bates, S., et al.: Conformal prediction: A gentle introduction. Founda- tions and Trends® in Machine Learning16(4), 494–591 (2023)
2023
-
[5]
Contact-GraspNet: Efficient 6-dof grasp generation in cluttered scenes
Bajcsy, A., Siththaranjan, A., Tomlin, C.J., Dragan, A.D.: Analyzing human models that adapt online. In: Proc. IEEE Conf. Robotics and Automation. pp. 2754–2760. IEEE (2021). https://doi.org/10.1109/ICRA48506.2021.9561652
-
[6]
Bansal, S., Chen, M., Herbert, S., Tomlin, C.J.: Hamilton-jacobi reachability: A brief overview and recent advances. In: Proc. IEEE Conf. Decision and Control. pp. 2242–2253 (2017). https://doi.org/10.1109/CDC.2017.8263977
-
[7]
Contact-GraspNet: Efficient 6-dof grasp generation in cluttered scenes
Bansal, S., Tomlin, C.J.: Deepreach: A deep learning approach to high-dimensional reach- ability. In: Proc. IEEE Conf. Robotics and Automation. pp. 1817–1824 (2021). https://doi. org/10.1109/ICRA48506.2021.9561949
-
[8]
Bastani, O., Li, S.: Safe reinforcement learning via statistical model predictive shielding. In: Proc. Robotics: Science and Systems (7 2021). https://doi.org/10.15607/RSS.2021.XVII.026
-
[9]
IEEE Robotics and Automation Letters (2024)
Bejarano, F.P., Brunke, L., Schoellig, A.P.: Safety filtering while training: Improving the performance and sample efficiency of reinforcement learning agents. IEEE Robotics and Automation Letters (2024)
2024
-
[10]
arXiv preprint arXiv:2511.11567 (2025)
Binny, A.E., Dixit, A.: Who moved my distribution? conformal prediction for interactive multi-agent systems. arXiv preprint arXiv:2511.11567 (2025)
arXiv 2025
-
[11]
Automatica35(11), 1747–1767 (1999)
Blanchini, F.: Set invariance in control. Automatica35(11), 1747–1767 (1999). https://doi. org/https://doi.org/10.1016/S0005-1098(99)00113-2
-
[12]
IEEE Transactions on Robotics (2024)
Borquez, J., Chakraborty, K., Wang, H., Bansal, S.: On safety and liveness filtering using hamilton-jacobi reachability analysis. IEEE Transactions on Robotics (2024). https://doi.org/ 10.1109/TRO.2024.3454470
-
[13]
In: 2023 IEEE International Conference on Robotics and Automation (ICRA), pp
Borquez, J., Nakamura, K., Bansal, S.: Parameter-conditioned reachable sets for updating safety assurances online. In: Proc. IEEE Conf. Robotics and Automation. pp. 10553–10559 (2023). https://doi.org/10.1109/ICRA48891.2023.10160554
-
[14]
In: Learning for Dynamics & Control
Dixit, A., Lindemann, L., Wei, S.X., Cleaveland, M., Pappas, G.J., Burdick, J.W.: Adaptive conformal prediction for motion planning among dynamic agents. In: Learning for Dynamics & Control. pp. 300–314. PMLR (2023), https://proceedings.mlr.press/v211/dixit23a.html
2023
-
[15]
IEEE Access9, 163938–163953 (2021)
Everett, M., Habibi, G., Sun, C., How, J.P.: Reachability analysis of neural feedback loops. IEEE Access9, 163938–163953 (2021). https://doi.org/10.1109/ACCESS.2021.3133370
-
[16]
Fisac, J.F., Lugovoy, N.F., Rubies-Royo, V ., Ghosh, S., Tomlin, C.J.: Bridging hamilton- jacobi safety analysis and reinforcement learning. In: Proc. IEEE Conf. Robotics and Au- tomation. pp. 8550–8556 (2019). https://doi.org/10.1109/ICRA.2019.8794107
-
[17]
Annual Review of Control, Robotics, and Autonomous Systems7(1) (2024)
Hsu, K.C., Hu, H., Fisac, J.F.: The safety filter: A unified view of safety-critical control in autonomous systems. Annual Review of Control, Robotics, and Autonomous Systems7(1) (2024). https://doi.org/10.1146/annurev-control-071723-102940
-
[18]
In: Learning for Dynamics & Control
Hsu, K.C., Nguyen, D.P., Fisac, J.F.: Isaacs: Iterative soft adversarial actor-critic for safety. In: Learning for Dynamics & Control. Proceedings of Machine Learning Research, vol. 211 (6 2023), https://proceedings.mlr.press/v211/hsu23a.html
2023
-
[19]
Hsu, K.C., Rubies-Royo, V ., Tomlin, C.J., Fisac, J.F.: Safety and liveness guarantees through reach-avoid reinforcement learning. In: Proc. Robotics: Science and Systems (7 2021). https: //doi.org/10.15607/RSS.2021.XVII.077
-
[20]
Hu, H., Fazlyab, M., Morari, M., Pappas, G.J.: Reach-sdp: Reachability analysis of closed- loop systems with neural network controllers via semidefinite programming. In: Proc. IEEE Conf. Decision and Control. pp. 5929–5934 (2020). https://doi.org/10.1109/CDC42340. 2020.9304296 18 H. Hu
-
[21]
IEEE Robotics and Automation Letters7(2), 5591–5598 (2022)
Hu, H., Nakamura, K., Fisac, J.F.: Sharp: Shielding-aware robust planning for safe and ef- ficient human-robot interaction. IEEE Robotics and Automation Letters7(2), 5591–5598 (2022). https://doi.org/10.1109/LRA.2022.3155229
-
[22]
In: Conf
Hu, H., Zhang, Z., Nakamura, K., Bajcsy, A., Fisac, J.F.: Deception game: Closing the safety- learning loop in interactive robot autonomy. In: Conf. Robot Learning. Proceedings of Ma- chine Learning Research, vol. 229, pp. 3830–3850 (11 2023), https://proceedings.mlr.press/ v229/hu23b.html
2023
-
[23]
Differential Games I (1954), https://www
Isaacs, R.: Differential Games I: Introduction. Differential Games I (1954), https://www. rand.org/pubs/research_memoranda/RM1391.html
1954
-
[24]
In: Proceedings of the 22nd ACM Interna- tional Conference on Hybrid Systems: Computation and Control
Ivanov, R., Weimer, J., Alur, R., Pappas, G.J., Lee, I.: Verisig: verifying safety properties of hybrid systems with neural network controllers. In: Proceedings of the 22nd ACM Interna- tional Conference on Hybrid Systems: Computation and Control. pp. 169–178 (2019)
2019
-
[25]
Econometrica: Journal of the Econometric Society pp
Kajii, A., Morris, S.: The robustness of equilibria to incomplete information. Econometrica: Journal of the Econometric Society pp. 1283–1309 (1997). https://doi.org/10.2307/2171737
-
[26]
IEEE Robotics and Automation Letters (2025)
Li, J., Lee, D., Lee, J., Dong, K.S., Sojoudi, S., Tomlin, C.: Certifiable reachability learning using a new lipschitz continuous value function. IEEE Robotics and Automation Letters (2025)
2025
-
[27]
In: Learning for Dynamics & Control
Lin, A., Bansal, S.: Verification of neural reachable tubes via scenario optimization and conformal prediction. In: Learning for Dynamics & Control. pp. 719–731. PMLR (2024), https://proceedings.mlr.press/v242/lin24a.html
2024
-
[28]
IEEE Robotics and Automation Letters8(8), 5116–5123 (2023)
Lindemann, L., Cleaveland, M., Shim, G., Pappas, G.J.: Safe planning in dynamic environ- ments using conformal prediction. IEEE Robotics and Automation Letters8(8), 5116–5123 (2023). https://doi.org/10.1109/LRA.2023.3292071
-
[29]
arXiv preprint arXiv:2505.23210 (2025)
Lutkus, P., Wang, K., Lindemann, L., Tu, S.: Latent representations for control design with provable stability and safety guarantees. arXiv preprint arXiv:2505.23210 (2025). https:// doi.org/10.48550/arXiv.2505.23210
-
[30]
arXiv preprint arXiv:2511.10586 (2025)
Mirzaeedodangeh, O., Shekhtman, E., Matni, N., Lindemann, L.: Safe planning in interac- tive environments via iterative policy updates and adversarially robust conformal prediction. arXiv preprint arXiv:2511.10586 (2025)
Pith/arXiv arXiv 2025
-
[31]
IEEE Transactions on Automatic Control 50(7), 947–957 (2005)
Mitchell, I.M., Bayen, A.M., Tomlin, C.J.: A time-dependent hamilton-jacobi formulation of reachable sets for continuous dynamic games. IEEE Transactions on Automatic Control 50(7), 947–957 (2005). https://doi.org/10.1109/TAC.2005.851439
-
[32]
Nakamura, K., Peters, L., Bajcsy, A.: Generalizing safety beyond collision-avoidance via latent-space reachability analysis (2025)
2025
-
[33]
In: Conf
Nguyen, D.P., Hsu, K.C., Yu, W., Tan, J., Fisac, J.F.: Gameplay filters: Robust zero-shot safety through adversarial imagination. In: Conf. Robot Learning. pp. 387–407. PMLR (2025), https://proceedings.mlr.press/v270/nguyen25a.html
2025
-
[34]
Oh, D.D., Lidard, J., Hu, H., Sinhmar, H., Lazarski, E., Gopinath, D., Sumner, E.S., DeCas- tro, J.A., Rosman, G., Leonard, N.E., et al.: Safety with Agency: Human-Centered Safety Filter with Application to AI-Assisted Motorsports. Proc. Robotics: Science and Systems (2025). https://doi.org/10.48550/arXiv.2504.11717
-
[35]
arXiv preprint arXiv:2510.18082 (2025)
Oh, D.D., Nguyen, D.P., Hu, H., Fisac, J.F.: Provably optimal reinforcement learning under safety filtering. arXiv preprint arXiv:2510.18082 (2025)
arXiv 2025
-
[36]
In: International workshop on hybrid systems: Computation and control
Prajna, S., Jadbabaie, A.: Safety verification of hybrid systems using barrier certificates. In: International workshop on hybrid systems: Computation and control. pp. 477–492. Springer (2004)
2004
-
[37]
Robey, A., Hu, H., Lindemann, L., Zhang, H., Dimarogonas, D.V ., Tu, S., Matni, N.: Learn- ing control barrier functions from expert demonstrations. In: Proc. IEEE Conf. Decision and Control. pp. 3717–3724 (2020). https://doi.org/10.1109/CDC42340.2020.9303785
-
[38]
arXiv preprint arXiv:2505.00779 (2025) Verifiable Belief-Space Safety Filters 19
Seo, J., Nakamura, K., Bajcsy, A.: Uncertainty-aware latent safety filters for avoiding out- of-distribution failures. arXiv preprint arXiv:2505.00779 (2025) Verifiable Belief-Space Safety Filters 19
arXiv 2025
-
[39]
Shi, S., Jiang, L., Dai, D., Schiele, B.: Motion transformer with global intention lo- calization and local movement refinement. Advances in Neural Information Processing Systems35, 6531–6543 (2022), https://proceedings.neurips.cc/paper_files/paper/2022/hash/ 2ab47c960bfee4f86dfc362f26ad066a-Abstract-Conference.html
2022
-
[40]
IEEE Robotics and Automation Letters8(11), 7833–7840 (2023)
Strawn, K.J., Ayanian, N., Lindemann, L.: Conformal predictive safety filter for rl controllers in dynamic environments. IEEE Robotics and Automation Letters8(11), 7833–7840 (2023)
2023
-
[41]
Wabersich, K.P., Zeilinger, M.N.: Linear model predictive safety certification for learning- based control. In: Proc. IEEE Conf. Decision and Control. pp. 7130–7135 (2018). https: //doi.org/10.1109/CDC.2018.8619829
-
[42]
In: Algorithmic Foundations of Robotics (2024), https://www.algorithmic-robotics.org/papers/ 45_MAGICS_Adversarial_RL_with_.pdf
Wang, J., Hu, H., Nguyen, D.P., Fisac, J.F.: MAGICS: Adversarial RL with Minimax Actors Guided by Implicit Critic Stackelberg for Convergent Neural Synthesis of Robot Safety. In: Algorithmic Foundations of Robotics (2024), https://www.algorithmic-robotics.org/papers/ 45_MAGICS_Adversarial_RL_with_.pdf
2024
-
[43]
Xiao, W., Belta, C.: Control barrier functions for systems with high relative degree. In: Proc. IEEE Conf. Decision and Control. pp. 474–479 (2019). https://doi.org/10.1109/CDC40024. 2019.9029455
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.