SkillPyramid: A Hierarchical Skill Consolidation Framework for Self-Evolving Agents
Pith reviewed 2026-06-28 10:12 UTC · model grok-4.3
The pith
SkillPyramid organizes agent skills into a hierarchy and adds self-evolution so agents compose and reuse capabilities across tasks instead of rebuilding them redundantly.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
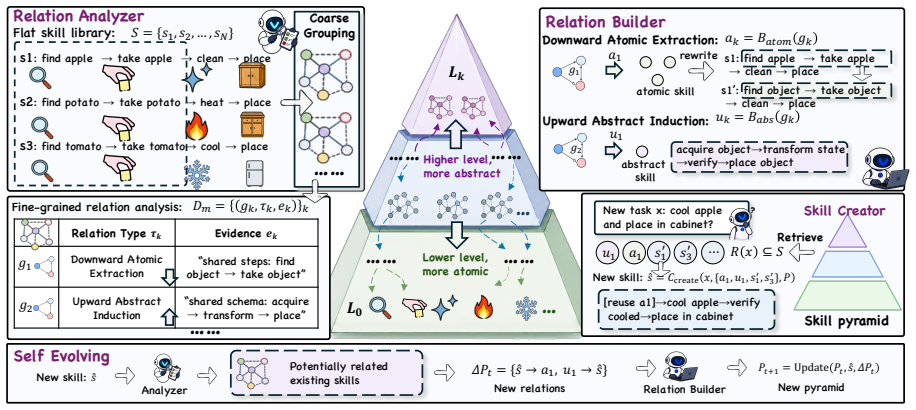
SkillPyramid operates on a hierarchical skill topology and introduces a self-evolution mechanism that enables agents to compose, validate, and incorporate new skills during task execution, transforming a static skill collection into a dynamic evolution system.
What carries the argument
The hierarchical skill topology together with the self-evolution mechanism that composes, validates, and incorporates new skills on the fly.
If this is right
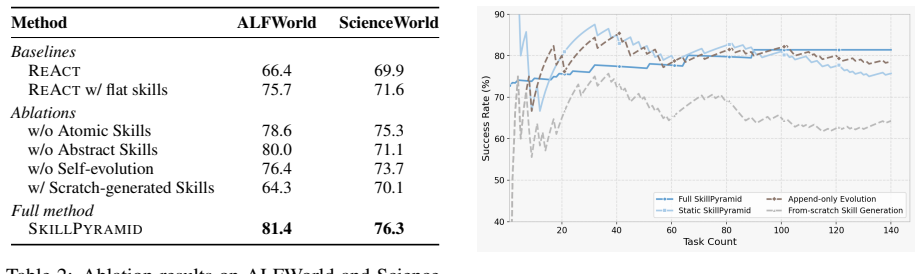
- Agents achieve 38 percent higher average reward on the tested benchmarks.
- Execution steps drop by 27.7 percent while solving the same tasks.
- Skills transfer to novel scenarios instead of being rebuilt for each task.
- The same gains appear across four different backbone models.
Where Pith is reading between the lines
- Agents could sustain performance across longer task sequences without repeated human intervention to rebuild capabilities.
- The framework might reduce reliance on large external skill libraries by letting agents grow their own.
- Similar hierarchical consolidation could be tested in domains such as robotics where physical skill reuse matters.
Load-bearing premise
The self-evolution process can reliably compose and validate new skills without creating redundancy or invalid combinations that lower overall performance.
What would settle it
Apply SkillPyramid to the same ALFWorld, WebShop, and ScienceWorld tasks and observe that average reward falls or execution steps rise relative to the non-hierarchical baselines.
Figures

read the original abstract
Recent AI agents can flexibly invoke skills to solve complex tasks, but their long-term improvement is fundamentally constrained by a lack of systematic skill construction, accumulation, and transfer. In particular, without a unified framework for skill consolidation, agents tend to redundantly construct similar capabilities across different tasks, are unable to effectively transform experience into reusable assets, and struggle to generalize task-specific skills to novel scenarios. To address this limitation, we propose SkillPyramid, a skill consolidation framework that reuses existing skill experience for broader task generalization. Operating on a hierarchical skill topology, SkillPyramid further introduces a self-evolution mechanism that enables agents to compose, validate, and incorporate new skills during task execution. Experiments on ALFWorld, WebShop, and ScienceWorld across four backbone models show that SkillPyramid substantially increases the average reward by 38.0% and reduces execution steps by 27.7%. Overall, our method transforms a skill collection from a static resource pool into a dynamic evolution system.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes SkillPyramid, a hierarchical skill consolidation framework for self-evolving AI agents. It features a hierarchical skill topology and a self-evolution mechanism that allows agents to compose, validate, and incorporate new skills during task execution. Experiments on ALFWorld, WebShop, and ScienceWorld across four backbone models report a 38.0% increase in average reward and a 27.7% reduction in execution steps, transforming static skill collections into dynamic evolution systems.
Significance. If the results hold under full scrutiny, the framework addresses a core limitation in current agent systems by enabling systematic skill accumulation, transfer, and generalization. The multi-environment and multi-backbone evaluation provides a broad testbed; credit is due for focusing on a dynamic rather than static skill resource model.
minor comments (2)
- [Abstract] Abstract: the headline performance numbers (38.0% reward, 27.7% steps) are presented without reference to error bars, number of runs, or statistical tests; adding these would strengthen verifiability of the central empirical claim.
- [§3] The description of the self-evolution mechanism would benefit from an explicit statement of the validation criteria used to reject invalid or redundant skill compositions.
Simulated Author's Rebuttal
We thank the referee for the positive summary of SkillPyramid, the recognition of its significance in enabling dynamic skill evolution, and the recommendation for minor revision. No major comments appear in the report.
Circularity Check
No significant circularity detected
full rationale
The paper proposes an empirical framework for hierarchical skill consolidation and self-evolution in agents, validated through experiments on ALFWorld, WebShop, and ScienceWorld across four backbones, reporting average reward gains of 38.0% and step reductions of 27.7%. No mathematical derivations, equations, fitted parameters presented as predictions, or self-citation chains that reduce claims to internal definitions by construction appear in the abstract or described results. The performance claims rest on external task evaluations rather than reductions to the framework's own inputs or topology, making the derivation chain self-contained against the reported benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
arXiv preprint arXiv:2603.04448 , year=
Skillnet: Create, evaluate, and connect ai skills , author=. arXiv preprint arXiv:2603.04448 , year=
-
[2]
Advances in neural information processing systems , volume=
Reflexion: Language agents with verbal reinforcement learning , author=. Advances in neural information processing systems , volume=
-
[3]
ALFWorld: Aligning Text and Embodied Environments for Interactive Learning
Alfworld: Aligning text and embodied environments for interactive learning , author=. arXiv preprint arXiv:2010.03768 , year=
work page internal anchor Pith review Pith/arXiv arXiv 2010
-
[4]
Proceedings of the 2022 Conference on Empirical Methods in Natural Language Processing , pages=
Scienceworld: Is your agent smarter than a 5th grader? , author=. Proceedings of the 2022 Conference on Empirical Methods in Natural Language Processing , pages=
2022
-
[5]
Advances in Neural Information Processing Systems , volume=
Webshop: Towards scalable real-world web interaction with grounded language agents , author=. Advances in Neural Information Processing Systems , volume=
-
[6]
ReAct: Synergizing Reasoning and Acting in Language Models
React: Synergizing reasoning and acting in language models , author=. arXiv preprint arXiv:2210.03629 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[7]
Proceedings of the AAAI Conference on Artificial Intelligence , volume=
Expel: Llm agents are experiential learners , author=. Proceedings of the AAAI Conference on Artificial Intelligence , volume=
-
[8]
MRKL Systems: A modular, neuro-symbolic architecture that combines large language models, external knowledge sources and discrete reasoning , author=. arXiv preprint arXiv:2205.00445 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[9]
Advances in neural information processing systems , volume=
Toolformer: Language models can teach themselves to use tools , author=. Advances in neural information processing systems , volume=
-
[10]
Advances in Neural Information Processing Systems , volume=
Hugginggpt: Solving ai tasks with chatgpt and its friends in hugging face , author=. Advances in Neural Information Processing Systems , volume=
-
[11]
Advances in Neural Information Processing Systems , volume=
Chameleon: Plug-and-play compositional reasoning with large language models , author=. Advances in Neural Information Processing Systems , volume=
-
[12]
International Conference on Learning Representations , volume=
Toolllm: Facilitating large language models to master 16000+ real-world apis , author=. International Conference on Learning Representations , volume=
-
[13]
2023 IEEE International conference on robotics and automation (ICRA) , pages=
Code as policies: Language model programs for embodied control , author=. 2023 IEEE International conference on robotics and automation (ICRA) , pages=. 2023 , organization=
2023
-
[14]
Describe, explain, plan and select: Interactive planning with large language models enables open-world multi-task agents , author=. arXiv preprint arXiv:2302.01560 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[15]
Voyager: An Open-Ended Embodied Agent with Large Language Models
Voyager: An open-ended embodied agent with large language models , author=. arXiv preprint arXiv:2305.16291 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[16]
International Conference on Learning Representations , volume=
Gaia: a benchmark for general ai assistants , author=. International Conference on Learning Representations , volume=
-
[17]
DeepSeek-V3.2: Pushing the Frontier of Open Large Language Models
Deepseek-v3. 2: Pushing the frontier of open large language models , author=. arXiv preprint arXiv:2512.02556 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[18]
2025 , month = apr, day =
Introducing. 2025 , month = apr, day =
2025
-
[19]
Gemini 2.5: Pushing the frontier with advanced reasoning, multimodality, long context, and next generation agentic capabilities , author=. arXiv preprint arXiv:2507.06261 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[20]
Qwen3 technical report , author=. arXiv preprint arXiv:2505.09388 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[21]
Workshop on Computer Games , pages=
Textworld: A learning environment for text-based games , author=. Workshop on Computer Games , pages=. 2018 , organization=
2018
-
[22]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Alfred: A benchmark for interpreting grounded instructions for everyday tasks , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[23]
SkillX: Automatically Constructing Skill Knowledge Bases for Agents
SkillX: Automatically constructing skill knowledge bases for agents , author=. arXiv preprint arXiv:2604.04804 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[24]
Skill-Pro: Learning Reusable Skills from Experience via Non-Parametric PPO for LLM Agents
Skill-Pro: Learning Reusable Skills from Experience via Non-Parametric PPO for LLM Agents , author=. arXiv preprint arXiv:2602.01869 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[25]
Memp: Exploring Agent Procedural Memory
Memp: Exploring agent procedural memory , author=. arXiv preprint arXiv:2508.06433 , year=
work page internal anchor Pith review Pith/arXiv arXiv
-
[26]
2025 , eprint=
Contextual Image Attack: How Visual Context Exposes Multimodal Safety Vulnerabilities , author=. 2025 , eprint=
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.