IR-SIM: A Lightweight Skill-Native Simulator for Navigation, Learning, and Benchmarking
Pith reviewed 2026-06-27 18:17 UTC · model grok-4.3
The pith
IR-SIM defines complete robotic navigation scenarios using only YAML configuration files that specify kinematics, collision checks, LiDAR sensing, visualization, and behaviors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
IR-SIM makes robotic simulation fully describable and reproducible by encoding mobile robot kinematics, geometric collision checking, LiDAR sensing, visualization, and behavior modules inside YAML configuration files, so that scenarios can be created or modified from text prompts and used directly for benchmarking navigation algorithms or generating training data.
What carries the argument
YAML configuration files that encapsulate kinematics, geometric collision checking, LiDAR sensing, visualization, and behavior modules as the single source of truth for each scenario.
If this is right
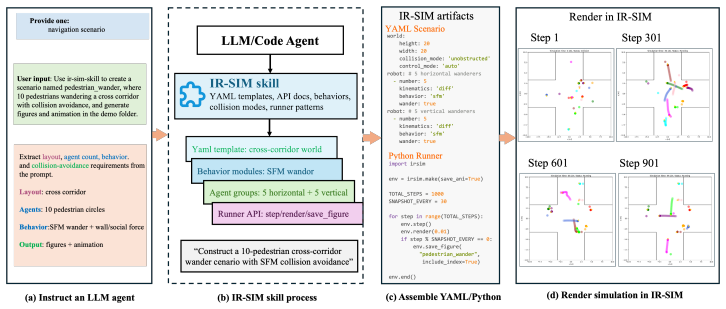
- Navigation scenarios can be constructed directly from natural language descriptions via the IR-SIM agent skills.
- Training data for collision-avoidance policies can be generated automatically from the defined scenarios.
- Social navigation policies can be benchmarked in reproducible, text-specified environments.
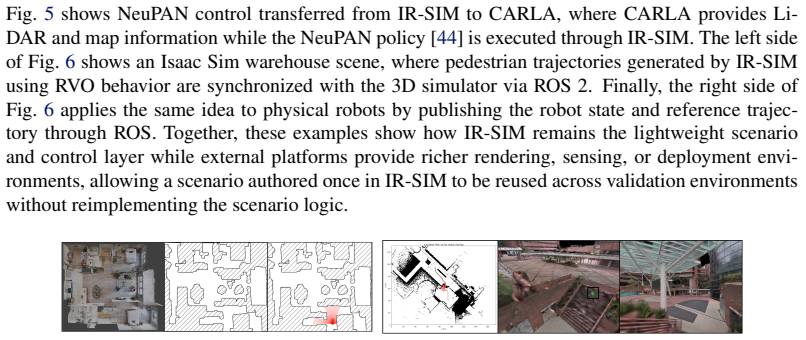
- Prototyped algorithms can be transferred to high-fidelity simulators and real robots without writing new interface code.
Where Pith is reading between the lines
- The YAML-only design could lower the entry barrier for researchers who want to test navigation ideas without maintaining simulator codebases.
- Because scenarios are text files, they could be version-controlled and shared in the same way as datasets or model weights.
- Extending the same configuration approach to other robot skills such as manipulation would require only additional module definitions inside the YAML schema.
Load-bearing premise
YAML configuration files alone can fully capture and reproduce the required navigation scenarios, sensing, and behaviors for benchmarking and learning without needing custom code in most practical cases.
What would settle it
A navigation task whose accurate reproduction requires sensor or behavior logic that cannot be expressed inside the existing YAML schema and therefore demands extra Python code.
Figures

read the original abstract
Simulation plays a key role in automated robotics research supported by large language models (LLMs). However, existing simulators often require custom code or complex interfaces, creating a barrier to rapid prototyping and automated algorithm development. To this end, we propose the Intelligent Robot Simulator (IR-SIM), a lightweight skill-native navigation simulator designed for rapid scenario construction, benchmarking, and robot learning. In IR-SIM, scenarios are entirely defined by YAML configuration files that specify mobile robot kinematics, geometric collision checking, LiDAR sensing, visualization, and behavior modules. This design makes robotic simulation fully describable and reproducible, allowing scenarios to be generated and modified from text prompts through the proposed IR-SIM agent skills. The resulting scenarios can be used for automated benchmarking of navigation algorithms and for automated generation of training data for learning methods. Furthermore, IR-SIM provides bridges to high fidelity simulators and real world deployment, allowing users to validate their algorithms in more realistic settings after prototyping without extra coding. The experiments showcase the convenience and versatility of IR-SIM in multiple tasks: constructing navigation scenarios from natural language, training a collision avoidance policy, benchmarking social navigation policies, and bridging to high fidelity simulators and real world deployment. The project website is available at https://github.com/hanruihua/ir-sim.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents IR-SIM, a lightweight simulator for robot navigation tasks. Scenarios are claimed to be entirely defined by YAML configuration files specifying mobile robot kinematics, geometric collision checking, LiDAR sensing, visualization, and behavior modules. This enables full describability and reproducibility, allowing scenario generation and modification from text prompts via IR-SIM agent skills. The simulator supports automated benchmarking of navigation algorithms, generation of training data for learning methods, and provides bridges to high-fidelity simulators and real-world deployment without extra coding. Experiments are described for constructing navigation scenarios from natural language, training a collision avoidance policy, benchmarking social navigation policies, and bridging to other simulators and real world.
Significance. If the YAML-based configuration approach successfully allows complex behavior modules to be fully specified and reproduced without custom code, IR-SIM could lower barriers for rapid prototyping and LLM-supported robotics research by making simulations text-describable and reproducible. The bridging capability to high-fidelity sims and real world is a positive feature for validation. The open-source github release supports reproducibility of the tool itself.
major comments (2)
- [Abstract] Abstract: The central claim that 'scenarios are entirely defined by YAML configuration files that specify ... and behavior modules' is load-bearing for the reproducibility, text-prompt generation, and no-extra-coding assertions. No evidence or verification is supplied that behavior modules (e.g., for social navigation or collision avoidance) can be exhaustively configured via declarative YAML parameters alone rather than by selecting and parameterizing pre-existing code implementations whose logic remains outside the YAML file.
- [Experiments] Experiments description: The four listed experiment types (natural-language scenario construction, policy training, social navigation benchmarking, bridging) are presented without any quantitative results, success rates, error analysis, or ablation showing that the YAML approach suffices for the claimed tasks without custom code, undermining assessment of the design's practical scope.
minor comments (2)
- The manuscript would benefit from including concrete example YAML snippets (perhaps in an appendix or figure) illustrating specification of a behavior module to make the 'entirely defined by YAML' claim concrete.
- A feature-comparison table against existing simulators (e.g., Gazebo, Habitat, Isaac Sim) would help clarify the claimed lightweight and skill-native advantages.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. We address each major comment below, clarifying the design of IR-SIM and committing to revisions that strengthen the evidence for our claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'scenarios are entirely defined by YAML configuration files that specify ... and behavior modules' is load-bearing for the reproducibility, text-prompt generation, and no-extra-coding assertions. No evidence or verification is supplied that behavior modules (e.g., for social navigation or collision avoidance) can be exhaustively configured via declarative YAML parameters alone rather than by selecting and parameterizing pre-existing code implementations whose logic remains outside the YAML file.
Authors: We clarify that IR-SIM behavior modules are selected and fully parameterized via declarative YAML entries: the file specifies the module identifier (e.g., 'social_navigation' or 'orca') together with all numeric and structural parameters that govern its execution. The simulator core supplies the implementation, yet the complete scenario—including which modules are active and their exact settings—is captured in the YAML without any additional user code. To supply the requested verification, the revised manuscript will include complete YAML excerpts for the social-navigation and collision-avoidance modules used in the experiments, demonstrating that the configuration is exhaustive and reproducible from the file alone. revision: yes
-
Referee: [Experiments] Experiments description: The four listed experiment types (natural-language scenario construction, policy training, social navigation benchmarking, bridging) are presented without any quantitative results, success rates, error analysis, or ablation showing that the YAML approach suffices for the claimed tasks without custom code, undermining assessment of the design's practical scope.
Authors: The experiments were written to illustrate the end-to-end workflows (text-to-YAML generation, data collection for learning, policy benchmarking, and cross-simulator bridging) rather than to report algorithmic performance. We acknowledge that the lack of quantitative metrics makes it difficult to judge the practical reach of the YAML-only approach. In the revision we will augment the experiments section with concrete numbers: success rates and collision counts for the trained collision-avoidance policy, standard social-navigation metrics (e.g., success rate, average time to goal) for the benchmarked policies, and timing/error statistics for the bridging examples, together with a short ablation confirming that all scenarios were created without custom code beyond the supplied YAML. revision: yes
Circularity Check
No circularity: software design claim with no derivations or self-referential reductions
full rationale
The paper describes a simulator architecture whose central claim is that scenarios are defined via YAML files specifying kinematics, collision, sensing, visualization, and behavior modules. No equations, fitted parameters, predictions, or uniqueness theorems appear. No self-citations are invoked as load-bearing premises. The claim is an implementation assertion about the tool's interface, not a derivation that reduces to its own inputs by construction. External reproducibility depends on the released code and configs, which is outside the scope of circularity analysis. This matches the default non-circular case for software papers.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Standard mobile robot kinematic models and geometric collision checking are sufficient to represent navigation scenarios.
- domain assumption YAML files can fully encode visualization, LiDAR sensing, and behavior modules without loss of fidelity for the intended use cases.
Reference graph
Works this paper leans on
-
[1]
Agent skills overview.https://platform.claude.com/docs/en/ agents-and-tools/agent-skills/overview, 2025
Anthropic. Agent skills overview.https://platform.claude.com/docs/en/ agents-and-tools/agent-skills/overview, 2025
2025
-
[2]
C. Lu, C. Lu, R. T. Lange, Y . Yamada, S. Hu, J. Foerster, D. Ha, and J. Clune. To- wards end-to-end automation of ai research.Nature, 651(8107):914–919, 2026. doi: 10.1038/s41586-026-10265-5
-
[3]
Y . Wang, Z. Xian, F. Chen, T.-H. Wang, Y . Wang, K. Fragkiadaki, Z. Erickson, D. Held, and C. Gan. RoboGen: Towards unleashing infinite data for automated robot learning via genera- tive simulation. In R. Salakhutdinov, Z. Kolter, K. Heller, A. Weller, N. Oliver, J. Scarlett, and F. Berkenkamp, editors,Proceedings of the 41st International Conference on ...
2024
-
[4]
L. Wang, Y . Ling, Z. Yuan, M. Shridhar, C. Bao, Y . Qin, B. Wang, H. Xu, and X. Wang. Gen- Sim: Generating robotic simulation tasks via large language models. InInternational Con- ference on Learning Representations. OpenReview.net, 2024. URLhttps://openreview. net/forum?id=OI3RoHoWAN
2024
-
[5]
Y . Gao and C.-M. Huang. Evaluation of socially-aware robot navigation.Frontiers in Robotics and AI, 8:721317, 2022. doi:10.3389/frobt.2021.721317
-
[6]
J. Karwowski, W. Szynkiewicz, and E. Niewiadomska-Szynkiewicz. Bridging requirements, planning, and evaluation: A review of social robot navigation.Sensors, 24(9):2794, 2024. doi:10.3390/s24092794
-
[7]
X. Xiao, B. Liu, G. Warnell, and P. Stone. Motion planning and control for mobile robot navigation using machine learning: A survey.Autonomous Robots, 46(5):569–597, 2022. doi: 10.1007/s10514-022-10039-8
-
[8]
A. Francis, C. P ´erez-D’Arpino, C. Li, F. Xia, A. Alahi, R. Alami, A. Bera, A. Biswas, J. Biswas, R. Chandra, H.-T. L. Chiang, M. Everett, S. Ha, J. Hart, J. P. How, H. Karnan, T.-W. E. Lee, L. J. Manso, R. Mirsky, S. Pirk, P. T. Singamaneni, P. Stone, A. V . Taylor, P. Trautman, N. Tsoi, M. V´azquez, X. Xiao, P. Xu, N. Yokoyama, A. Toshev, and R. Mart´ı...
-
[9]
Dosovitskiy, G
A. Dosovitskiy, G. Ros, F. Codevilla, A. Lopez, and V . Koltun. CARLA: An open urban driving simulator. In S. Levine, V . Vanhoucke, and K. Goldberg, editors,Proceedings of the 1st Annual Conference on Robot Learning, volume 78 ofProceedings of Machine Learning Research, pages 1–16. PMLR, 13–15 Nov 2017. URLhttps://proceedings.mlr.press/ v78/dosovitskiy17a.html
2017
-
[10]
N. P. Koenig and A. Howard. Design and use paradigms for Gazebo, an open-source multi- robot simulator. InProceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), volume 3, pages 2149–2154. IEEE, 2004. doi:10.1109/IROS. 2004.1389727
-
[11]
Isaac Sim, 2025
NVIDIA. Isaac Sim, 2025. URLhttps://github.com/isaac-sim/IsaacSim. Version 5.1.0; Apache-2.0 license. 9
2025
-
[12]
J.-L. Blanco-Claraco, B. Tymchenko, F. J. Ma ˜nas-Alvarez, F. Ca ˜nadas-Ar´anega, ´A. L ´opez- G´azquez, and J. C. Moreno. MultiVehicle Simulator (MVSim): Lightweight dynamics simu- lator for multiagents and mobile robotics research.SoftwareX, 23:101443, 2023. doi:10.1016/ j.softx.2023.101443. URLhttps://www.sciencedirect.com/science/article/pii/ S2352711...
arXiv 2023
-
[13]
Flatland: 2d robot simulator, 2026
Flatland Contributors. Flatland: 2d robot simulator, 2026. URLhttps://github.com/ avidbots/flatland
2026
-
[14]
pyrobosim: A ROS 2 enabled mobile robot simulator for behavior prototyping, 2026
pyrobosim Contributors. pyrobosim: A ROS 2 enabled mobile robot simulator for behavior prototyping, 2026. URLhttps://github.com/sea-bass/pyrobosim
2026
-
[15]
J. J. Damanik, C. A. Deresa, S. Park, W. Imliki, and H.-L. Choi. JALAN-Sim: A 200- million-fps simulated environment for 2d navigation in cluttered spaces, 2025. URLhttps: //damanikjosh.com/publications/2025-06-11-jalan-sim/
2025
-
[16]
R. Chandra, Z. Sprague, and J. Biswas. SOCIALGYM 2.0: Simulator for multi-robot learning and navigation in shared human spaces. InProceedings of the AAAI Conference on Artificial Intelligence, volume 38, pages 23778–23780, 2024. doi:10.1609/aaai.v38i21.30562. URL https://ojs.aaai.org/index.php/AAAI/article/view/30562
-
[17]
C. Chen, Y . Liu, S. Kreiss, and A. Alahi. Crowd-robot interaction: Crowd-aware robot navi- gation with attention-based deep reinforcement learning. In2019 International Conference on Robotics and Automation, pages 6015–6022. IEEE, 2019. doi:10.1109/ICRA.2019.8794134
-
[18]
C. Mavrogiannis, F. Baldini, A. Wang, D. Zhao, P. Trautman, A. Steinfeld, and J. Oh. Core challenges of social robot navigation: A survey.ACM Transactions on Human-Robot Interac- tion, 12(3):36:1–36:39, 2023. doi:10.1145/3583741
-
[19]
A. Biswas, A. Wang, G. Silvera, A. Steinfeld, and H. Admoni. SocNavBench: A grounded simulation testing framework for evaluating social navigation.ACM Transactions on Human- Robot Interaction, 11(3):1–24, 2022. doi:10.1145/3476413
-
[20]
J. van den Berg, S. J. Guy, M. Lin, and D. Manocha. Reciprocal n-body collision avoidance. InRobotics Research: The 14th International Symposium ISRR, pages 3–19. Springer, 2011. doi:10.1007/978-3-642-19457-3 1
-
[21]
D. Helbing and P. Moln ´ar. Social force model for pedestrian dynamics.Physical Review E, 51 (5):4282–4286, 1995. doi:10.1103/PhysRevE.51.4282
-
[22]
J. K. Terry, B. Black, N. Grammel, M. Jayakumar, A. Hari, R. Sullivan, L. S. Santos, C. Dief- fendahl, C. Horsch, R. Perez-Vicente, N. Williams, Y . Lokesh, and P. Ravi. PettingZoo: Gym for multi-agent reinforcement learning. InAdvances in Neural Information Processing Sys- tems, volume 34, pages 15032–15043, 2021. URLhttps://openreview.net/forum?id= fLnsj7fpbPI
2021
-
[23]
Raffin, A
A. Raffin, A. Hill, A. Gleave, A. Kanervisto, M. Ernestus, and N. Dormann. Stable-Baselines3: Reliable reinforcement learning implementations.Journal of Machine Learning Research, 22 (268):1–8, 2021. URLhttps://www.jmlr.org/papers/v22/20-1364.html
2021
-
[24]
J. Liang, W. Huang, F. Xia, P. Xu, K. Hausman, B. Ichter, P. Florence, and A. Zeng. Code as Policies: Language model programs for embodied control. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 9493–9500. IEEE, 2023. doi:10.1109/ ICRA48891.2023.10160591
arXiv 2023
-
[25]
Model Context Protocol: Architecture overview
Model Context Protocol Contributors. Model Context Protocol: Architecture overview. https://modelcontextprotocol.io/docs/learn/architecture, 2024. 10
2024
-
[26]
Isaac Sim MCP: Isaac simulation mcp extension and server.https: //github.com/omni-mcp/isaac-sim-mcp, 2025
omni-mcp Contributors. Isaac Sim MCP: Isaac simulation mcp extension and server.https: //github.com/omni-mcp/isaac-sim-mcp, 2025
2025
-
[27]
Perille, A
D. Perille, A. Truong, X. Xiao, and P. Stone. Benchmarking metric ground navigation. In 2020 IEEE International Symposium on Safety, Security, and Rescue Robotics, pages 116–
2020
-
[28]
doi:10.1109/SSRR50563.2020.9292572
IEEE, 2020. doi:10.1109/SSRR50563.2020.9292572
-
[29]
A. Nair, F. Jiang, K. Hou, Z. Xu, S. Li, X. Xiao, and P. Stone. DynaBARN: Benchmarking metric ground navigation in dynamic environments. In2022 IEEE International Symposium on Safety, Security, and Rescue Robotics, pages 347–352. IEEE, 2022. doi:10.1109/SSRR56537. 2022.10018758
-
[30]
G. Brockman, V . Cheung, L. Pettersson, J. Schneider, J. Schulman, J. Tang, and W. Zaremba. OpenAI Gym, 2016. URLhttps://arxiv.org/abs/1606.01540
Pith/arXiv arXiv 2016
-
[31]
Gymnasium: A Standard Interface for Reinforcement Learning Environments
M. Towers, A. Kwiatkowski, J. K. Terry, J. U. Balis, G. de Cola, T. Deleu, M. Goul ˜ao, A. Kallinteris, M. Krimmel, A. KG, R. Perez-Vicente, A. Pierr ´e, S. Schulhoff, J. J. Tai, H. Tan, and O. G. Younis. Gymnasium: A standard interface for reinforcement learning en- vironments. InAdvances in Neural Information Processing Systems, volume 38, 2025. doi: 10...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2407.17032 2025
-
[32]
A. Bou, M. Bettini, S. Dittert, V . Kumar, S. Sodhani, X. Yang, G. De Fabritiis, and V . Moens. TorchRL: A data-driven decision-making library for PyTorch, 2023. URLhttps://arxiv. org/abs/2306.00577
arXiv 2023
-
[33]
R. Han, S. Chen, S. Wang, Z. Zhang, R. Gao, Q. Hao, and J. Pan. Reinforcement learned distributed multi-robot navigation with reciprocal velocity obstacle shaped rewards.IEEE Robotics and Automation Letters, 7(3):5896–5903, 2022. doi:10.1109/LRA.2022.3161699
-
[34]
D. Martinez-Baselga, E. Sebasti ´an, E. Montijano, L. Riazuelo, C. Sag ¨u´es, and L. Montano. Avocado: Adaptive optimal collision avoidance driven by opinion.IEEE Transactions on Robotics, 41:2495–2511, 2025. doi:10.1109/TRO.2025.3552350
-
[35]
D. Oh, Y . Lim, H. Jung, J. Huh, J. Lee, C. Choi, H. J. Kim, and J. Park. A survey on collision avoidance algorithms for multi-robot systems.International Journal of Control, Automation and Systems, 23(7):2019–2035, 2025. doi:10.1007/s12555-024-1104-9
-
[36]
S. Gillies, C. van der Wel, J. Van den Bossche, M. W. Taves, J. Arnott, B. C. Ward, and others. Shapely, May 2025. URLhttps://github.com/shapely/shapely. Version 2.1.1; BSD- 3-Clause license; DOI: 10.5281/zenodo.5597138
-
[37]
J. D. Hunter. Matplotlib: A 2d graphics environment.Computing in Science & Engineering, 9 (3):90–95, 2007. doi:10.1109/MCSE.2007.55
-
[38]
P. E. Hart, N. J. Nilsson, and B. Raphael. A formal basis for the heuristic determination of minimum cost paths.IEEE Transactions on Systems Science and Cybernetics, 4(2):100–107,
-
[39]
doi:10.1109/TSSC.1968.300136
-
[40]
S. M. LaValle. Rapidly-exploring random trees: A new tool for path planning. Technical Report TR 98-11, Computer Science Department, Iowa State University, 1998
1998
-
[41]
M. Savva, A. Kadian, O. Maksymets, Y . Zhao, E. Wijmans, B. Jain, J. Straub, J. Liu, V . Koltun, J. Malik, D. Parikh, and D. Batra. Habitat: A platform for embodied AI research. InProceed- ings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 9339– 9347, 2019. doi:10.1109/ICCV .2019.00943. 11
-
[42]
S. K. Ramakrishnan, A. Gokaslan, E. Wijmans, O. Maksymets, A. Clegg, J. M. Turner, E. Un- dersander, W. Galuba, A. Westbury, A. X. Chang, M. Savva, Y . Zhao, and D. Batra. Habitat- Matterport 3D Dataset (HM3D): 1000 large-scale 3d environments for embodied AI. InThirty- fifth Conference on Neural Information Processing Systems Datasets and Benchmarks Track,
-
[43]
URLhttps://arxiv.org/abs/2109.08238
-
[44]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov. Proximal policy optimization algorithms.CoRR, abs/1707.06347, 2017. doi:10.48550/arXiv.1707.06347. URLhttps: //arxiv.org/abs/1707.06347
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1707.06347 2017
-
[45]
van den Berg, M
J. van den Berg, M. Lin, and D. Manocha. Reciprocal velocity obstacles for real-time multi- agent navigation. In2008 IEEE International Conference on Robotics and Automation, pages 1928–1935. IEEE, 2008
1928
-
[46]
Kerbl, G
B. Kerbl, G. Kopanas, T. Leimk ¨uhler, and G. Drettakis. 3D gaussian splatting for real-time radiance field rendering.ACM Transactions on Graphics, 42(4):1–14, 2023. doi:10.1145/ 3592433
2023
-
[47]
R. Han, S. Wang, S. Wang, Z. Zhang, J. Chen, S. Lin, C. Li, C. Xu, Y . C. Eldar, Q. Hao, et al. NeuPAN: Direct point robot navigation with end-to-end model-based learning.IEEE Transactions on Robotics, 41:2804–2824, 2025. doi:10.1109/TRO.2025.3554252. 12
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.