LIT-GS: LiDAR-Inertial-Thermal Gaussian Splatting for Illumination-Robust Mapping
Pith reviewed 2026-06-26 17:25 UTC · model grok-4.3
The pith
LiDAR plane constraints and visual anchors enable Gaussian Splatting to maintain accuracy when lighting changes degrade RGB cues.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
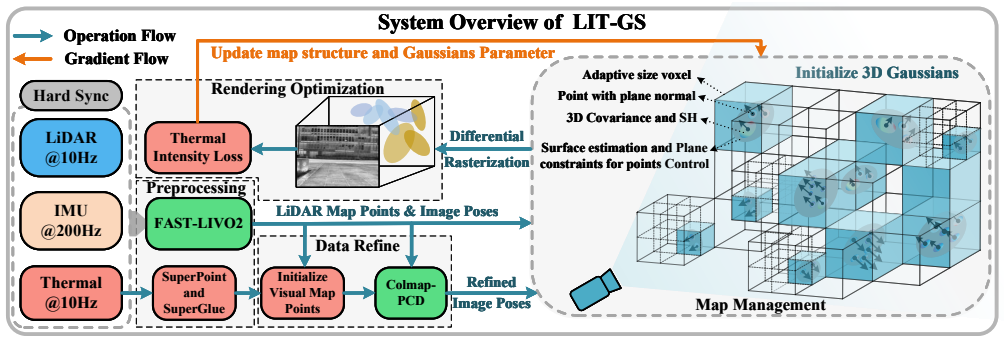
LIT-GS exploits LIV visual map points as confidence-aware cross-modal anchors to establish thermal-LiDAR associations, incorporates weighted LiDAR point-to-plane residuals into bundle adjustment to jointly refine poses and points under weak thermal supervision, and applies a LiDAR-plane-regularized differentiable splatting objective that constrains rendered points to observed planes, thereby mitigating surface thickening and structural drift while improving geometric accuracy and rendering quality over LIV-based baselines in challenging lighting.
What carries the argument
LiDAR-plane-regularized differentiable splatting objective that constrains rendered 3D points to align with locally observed planes, carrying the structural stability argument under thermal supervision.
Load-bearing premise
LIV visual map points can serve as reliable confidence-aware cross-modal anchors to establish thermal-LiDAR associations under weak thermal supervision.
What would settle it
A low-light sequence where removing the LiDAR point-to-plane residuals or the visual-anchor thermal associations produces equal or higher geometric error than the LIV Gaussian Splatting baseline.
Figures



read the original abstract
Gaussian Splatting has enabled real-time neural rendering, yet existing LiDAR-inertial-visual (LIV) Gaussian mapping pipelines remain fragile under illumination changes and texture-deficient scenes due to their reliance on RGB photometric cues. We present LIT-GS, a LiDAR-inertial-thermal Gaussian Splatting framework that injects LiDAR-derived plane geometry as an explicit constraint in both pose/structure refinement and Gaussian optimization. Specifically, we exploit LIV visual map points as confidence-aware cross-modal anchors to establish reliable thermal-LiDAR associations, and incorporate weighted LiDAR point-to-plane residuals into bundle adjustment to jointly refine camera poses and 3D points under weak thermal supervision. Building on the refined structure, we further introduce a LiDAR-plane-regularized differentiable splatting objective that constrains rendered 3D points to align with locally observed planes, mitigating surface thickening and structural drift in low-contrast thermal imagery. Experiments on proprietary sequences and public datasets demonstrate that LIT-GS consistently improves geometric accuracy and rendering quality over state-of-the-art LIV-based Gaussian Splatting baselines, particularly in challenging lighting conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces LIT-GS, a LiDAR-inertial-thermal Gaussian Splatting framework for illumination-robust mapping. It leverages LIV visual map points as confidence-aware anchors to link thermal and LiDAR data, incorporates weighted LiDAR point-to-plane residuals into bundle adjustment for pose and structure refinement under weak thermal supervision, and proposes a LiDAR-plane-regularized differentiable splatting objective to constrain rendered points to observed planes. Experiments on proprietary sequences and public datasets show consistent improvements in geometric accuracy and rendering quality over LIV-based baselines, especially in challenging lighting.
Significance. If the results hold, the work offers a meaningful advance in robust neural mapping by integrating thermal imagery with explicit LiDAR geometric constraints, addressing limitations of RGB-dependent methods in low-light or textureless scenes. The plane-regularization in splatting is a concrete technical contribution that could reduce structural drift. Credit is due for evaluating on both proprietary and public datasets, providing a basis for reproducibility.
major comments (1)
- [Abstract] Abstract: The central construction relies on 'LIV visual map points as confidence-aware cross-modal anchors' to establish thermal-LiDAR associations under weak thermal supervision. However, the abstract states that existing LIV pipelines are fragile under illumination changes due to RGB photometric cues. This is load-bearing for the claimed gains; if the anchors degrade in the target regime, the reliability of the associations and attribution of improvements to the new thermal-LiDAR components cannot be taken as given. The manuscript must provide quantitative evidence (e.g., anchor survival rates or an ablation removing visual anchors) in the experiments section showing that the mechanism remains effective precisely where RGB fails.
minor comments (1)
- Define all acronyms (LIV, LIT-GS, etc.) at first use in the main text and ensure consistent notation for residuals and regularization terms across sections.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We appreciate the request for quantitative evidence on the robustness of the cross-modal anchors under illumination changes and address the point below.
read point-by-point responses
-
Referee: The central construction relies on 'LIV visual map points as confidence-aware cross-modal anchors' to establish thermal-LiDAR associations under weak thermal supervision. However, the abstract states that existing LIV pipelines are fragile under illumination changes due to RGB photometric cues. This is load-bearing for the claimed gains; if the anchors degrade in the target regime, the reliability of the associations and attribution of improvements to the new thermal-LiDAR components cannot be taken as given. The manuscript must provide quantitative evidence (e.g., anchor survival rates or an ablation removing visual anchors) in the experiments section showing that the mechanism remains effective precisely where RGB fails.
Authors: We agree that explicit quantitative validation of anchor reliability in low-illumination regimes is necessary to support the attribution of gains. Our current experiments demonstrate consistent improvements in geometric accuracy and rendering on challenging lighting sequences relative to LIV baselines, which indirectly supports that the confidence-aware anchors remain usable when combined with thermal and LiDAR constraints. To directly address the concern, we will add anchor survival rates (computed from the LIV confidence scores) and an ablation removing the visual anchors to the experiments section in the revised manuscript. revision: yes
Circularity Check
No circularity in derivation; claims rest on experimental comparison
full rationale
The abstract and method description present a pipeline that incorporates LIV visual map points as anchors and adds LiDAR-plane constraints, but no equations or fitted quantities are shown reducing to each other by construction. Claims of improvement are supported by experiments on datasets rather than internal re-derivation or self-citation chains that bear the central result. The noted fragility of visual points under illumination is an assumption about input reliability, not a definitional loop in the derivation.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
3D Gaussian splatting for real-time radiance field rendering
B. Kerbl, G. Kopanas, T. Leimk ¨uhler, and G. Drettakis, “3D Gaussian splatting for real-time radiance field rendering.”ACM Transactions on Graphics, vol. 42, no. 4, pp. 1–14, 2023
2023
-
[2]
NeRF: Representing scenes as neural radiance fields for view synthesis,
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoor- thi, and R. Ng, “NeRF: Representing scenes as neural radiance fields for view synthesis,”Communications of the ACM, vol. 65, no. 1, pp. 99–106, 2021
2021
-
[3]
Structure-from-motion revisited,
J. L. Schonberger and J.-M. Frahm, “Structure-from-motion revisited,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2016, pp. 4104–4113
2016
-
[4]
FAST- RTFM: Fast RGB–Thermal Fusion for Point Cloud Mapping in Low- Light Environments,
J. Xu, T. Ye, S. Shi, M. He, C. Zheng, T. Huang, and Y . Cui, “FAST- RTFM: Fast RGB–thermal fusion for point cloud mapping in low- light environments,”IEEE/ASME Transactions on Mechatronics, 2026, 10.1109/TMECH.2026.3681437
-
[5]
LIV-GaussMap: LiDAR- inertial-visual fusion for real-time 3D radiance field map rendering,
S. Hong, J. He, X. Zheng, and C. Zheng, “LIV-GaussMap: LiDAR- inertial-visual fusion for real-time 3D radiance field map rendering,” IEEE Robotics and Automation Letters, vol. 9, no. 11, pp. 9765–9772, 2024
2024
-
[6]
GS-LIVO: Real-time LiDAR, inertial, and visual multi-sensor fused odometry with Gaussian mapping,
S. Hong, C. Zheng, Y . Shen, C. Li, F. Zhang, T. Qin, and S. Shen, “GS-LIVO: Real-time LiDAR, inertial, and visual multi-sensor fused odometry with Gaussian mapping,”arXiv preprint arXiv:2501.08672, 2025
-
[7]
LiV-GS: LiDAR-vision integration for 3D Gaussian splatting SLAM in outdoor environments,
R. Xiao, W. Liu, Y . Chen, and L. Hu, “LiV-GS: LiDAR-vision integration for 3D Gaussian splatting SLAM in outdoor environments,” IEEE Robotics and Automation Letters, vol. 10, no. 1, pp. 421–428, 2024
2024
-
[8]
Thermal3D-GS: Physics-induced 3D gaussians for thermal infrared novel-view synthesis,
Q. Chen, S. Shu, and X. Bai, “Thermal3D-GS: Physics-induced 3D gaussians for thermal infrared novel-view synthesis,” inProceedings of European Conference on Computer Vision. Springer, 2024, pp. 253–269
2024
-
[9]
arXiv preprint arXiv:2409.07200 (2024)
R. Lu, H. Chen, Z. Zhu, Y . Qin, M. Lu, L. Zhang, C. Yan, and A. Xue, “ThermalGaussian: Thermal 3D Gaussian splatting,”arXiv preprint arXiv:2409.07200, 2024
-
[10]
GS-LIVM: Real-time photo- realistic LiDAR-inertial-visual mapping with gaussian splatting,
Y . Xie, Z. Huang, J. Wu, and J. Ma, “GS-LIVM: Real-time photo- realistic LiDAR-inertial-visual mapping with gaussian splatting,”arXiv preprint arXiv:2410.17084, 2024
-
[11]
FAST- LIVO: Fast and tightly-coupled sparse-direct LiDAR-inertial-visual odometry,
C. Zheng, Q. Zhu, W. Xu, X. Liu, Q. Guo, and F. Zhang, “FAST- LIVO: Fast and tightly-coupled sparse-direct LiDAR-inertial-visual odometry,” inProceedings of 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022, pp. 4003–4009
2022
-
[12]
FAST-LIVO2: Fast, direct LiDAR-inertial-visual odometry,
C. Zheng, W. Xu, Z. Zou, T. Hua, C. Yuan, D. He, B. Zhou, Z. Liu, J. Lin, F. Zhuet al., “FAST-LIVO2: Fast, direct LiDAR-inertial-visual odometry,”IEEE Transactions on Robotics, vol. 41, no. 1, pp. 326– 346, 2024
2024
-
[13]
Splatam: Splat, track & map 3d gaussians for dense rgb-d slam,
N. Keetha, J. Karhade, K. M. Jatavallabhula, G. Yang, S. Scherer, D. Ramanan, and J. Luiten, “Splatam: Splat, track & map 3d gaussians for dense rgb-d slam,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024
2024
-
[14]
J. Liu, Y . Wan, B. Wang, C. Zheng, J. Lin, and F. Zhang, “GS- SDF: LiDAR-augmented Gaussian splatting and neural SDF for ge- ometrically consistent rendering and reconstruction,”arXiv preprint arXiv:2503.10170, 2025
-
[15]
SuperPoint: Self- supervised interest point detection and description,
D. DeTone, T. Malisiewicz, and A. Rabinovich, “SuperPoint: Self- supervised interest point detection and description,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, 2018, pp. 224–236
2018
-
[16]
Su- perGlue: Learning feature matching with graph neural networks,
P.-E. Sarlin, D. DeTone, T. Malisiewicz, and A. Rabinovich, “Su- perGlue: Learning feature matching with graph neural networks,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020, pp. 4938–4947
2020
-
[17]
D2-net: A trainable CNN for joint description and detection of local features,
M. Dusmanu, I. Rocco, T. Pajdla, M. Pollefeys, J. Sivic, A. Torii, and T. Sattler, “D2-net: A trainable CNN for joint description and detection of local features,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019, pp. 8092–8101
2019
-
[18]
A flexible new technique for camera calibration,
Z. Zhang, “A flexible new technique for camera calibration,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 22, no. 11, pp. 1330–1334, 2002
2002
-
[19]
Fast-calib: Lidar-camera extrinsic calibration in one second,
C. Zheng and F. Zhang, “Fast-calib: Lidar-camera extrinsic calibration in one second,”IEEE Robotics and Automation Practice, 2026
2026
-
[20]
MFCalib: Single-shot and automatic extrinsic calibration for LiDAR and camera in targetless en- vironments based on multi-feature edge,
T. Ye, W. Xu, C. Zheng, and Y . Cui, “MFCalib: Single-shot and automatic extrinsic calibration for LiDAR and camera in targetless en- vironments based on multi-feature edge,” inProceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, 2024, pp. 864–871
2024
-
[21]
M2DGR: A multi-sensor and multi-scenario SLAM dataset for ground robots,
J. Yin, A. Li, T. Li, W. Yu, and D. Zou, “M2DGR: A multi-sensor and multi-scenario SLAM dataset for ground robots,”IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2266–2273, 2021
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.