How to Guide Your Flow: Few-Step Alignment via Flow Map Reward Guidance
Pith reviewed 2026-07-01 08:15 UTC · model grok-4.3
The pith
Reformulating guidance as optimal control shows the flow map enables single-trajectory reward guidance with three steps.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By reformulating guidance as a deterministic optimal control problem, the authors derive a hierarchy of algorithms in which the flow map arises naturally in the optimal solution. They propose Flow Map Reward Guidance (FMRG), a training-free single-trajectory framework that uses the flow map to both integrate and guide the flow, matching or surpassing baselines across inverse problems and reward-guided generation with as few as 3 NFEs at text-to-image scale.
What carries the argument
Flow Map Reward Guidance (FMRG), a single-trajectory method that applies the flow map for both flow integration and reward guidance.
Load-bearing premise
The flow map obtained from the optimal control formulation can be used directly for guidance without approximations that lose accuracy at very low step counts.
What would settle it
Run FMRG and current multi-particle baselines on the same text-to-image reward benchmark with exactly three steps and check whether FMRG reward scores fall below the baselines.
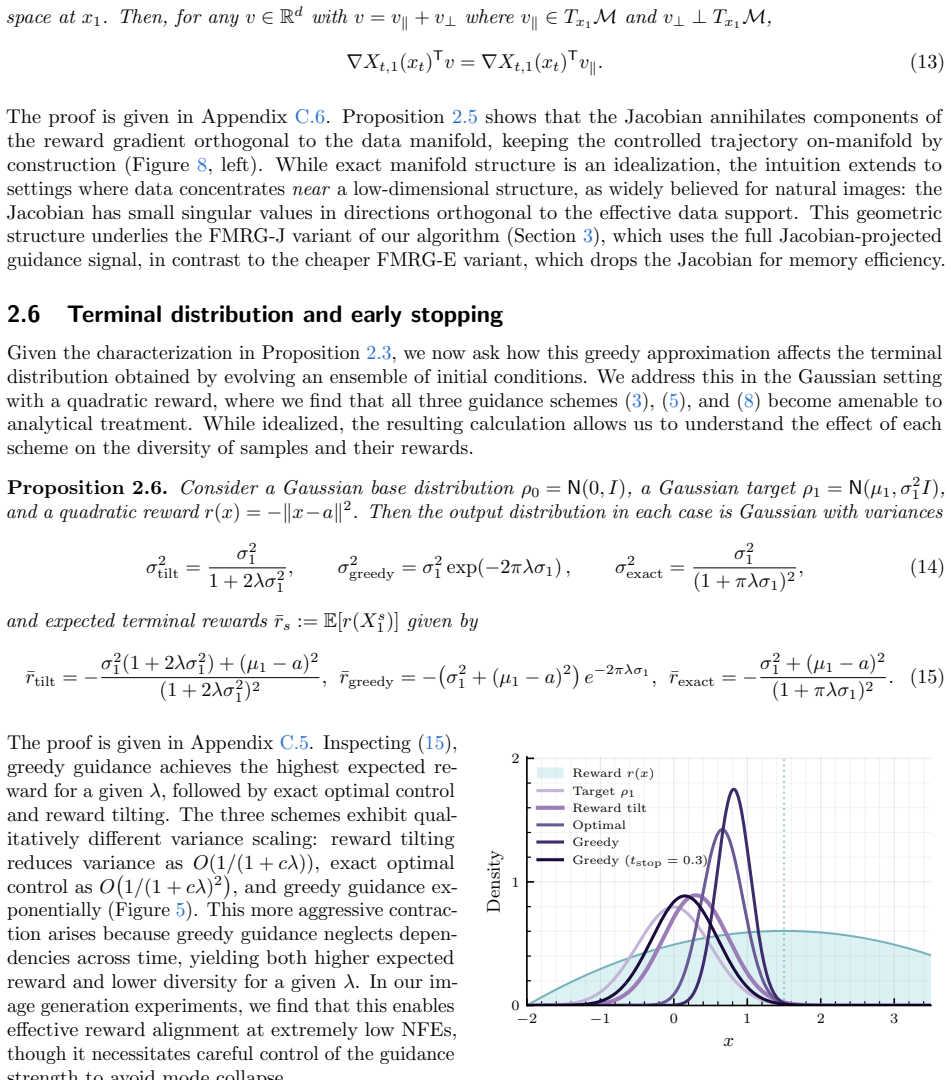
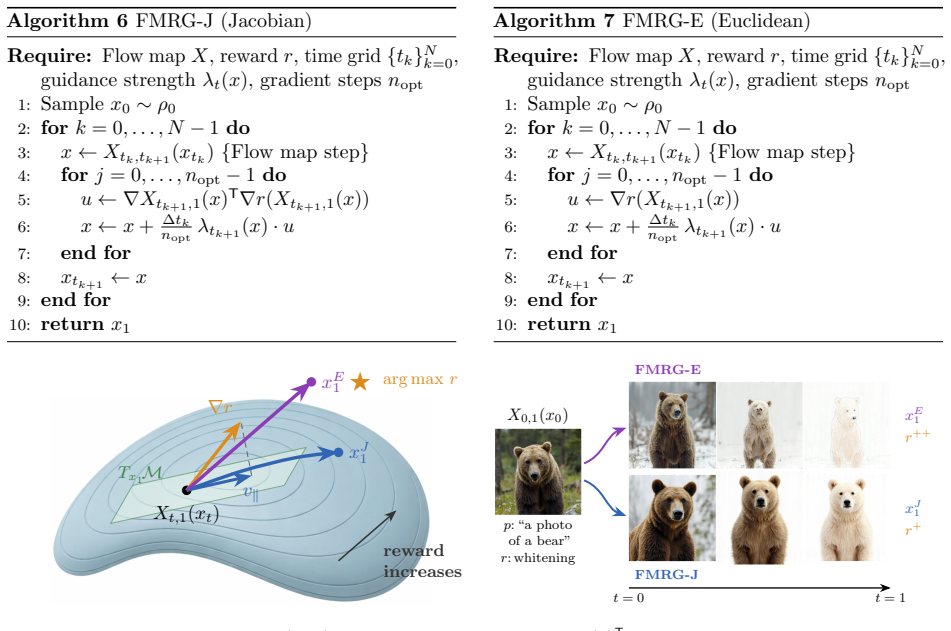
Figures







read the original abstract
In generative modeling, we often wish to produce samples that maximize a user-specified reward such as aesthetic quality or alignment with human preferences, a problem known as \textit{guidance}. Despite their widespread use, existing guidance methods either require expensive multi-particle, many-step schemes or rely on poorly understood approximations. We reformulate guidance as a \textit{deterministic optimal control problem}, yielding a hierarchy of algorithms that subsumes existing approaches at the coarsest level. We show that the \textit{flow map}, an object of significant recent interest for its role in fast inference, arises naturally in the optimal solution. Based on this observation, we propose \textbf{Flow Map Reward Guidance (FMRG)}: a training-free, \textit{single-trajectory} framework that uses the flow map to both integrate and guide the flow. At text-to-image scale, FMRG matches or surpasses baselines across inverse problems and reward-guided generation with \textbf{as few as 3 NFEs}, giving at least an order-of-magnitude speedup in comparison to prior state of the art. Code is available at https://github.com/jrrhuang/fmrg.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper reformulates reward guidance for flow-based generative models as a deterministic optimal control problem. This yields a hierarchy of algorithms in which the flow map arises exactly in the optimal solution. The authors introduce Flow Map Reward Guidance (FMRG), a training-free single-trajectory method that uses the flow map for both integration and guidance, and report that it matches or exceeds baselines on inverse problems and reward-guided text-to-image generation using as few as 3 NFEs.
Significance. If the derivation holds, the work supplies a principled, approximation-free route to few-step guidance that subsumes prior methods at the coarsest level and directly exploits the flow map. The empirical claims of order-of-magnitude speedup at text-to-image scale, supported by appropriate baselines and ablations, would be a notable advance for efficient alignment of flow models.
minor comments (3)
- §3 (optimal control formulation): the transition from the continuous-time control problem to the discrete hierarchy of algorithms would benefit from an explicit statement of the discretization scheme and any truncation error bounds.
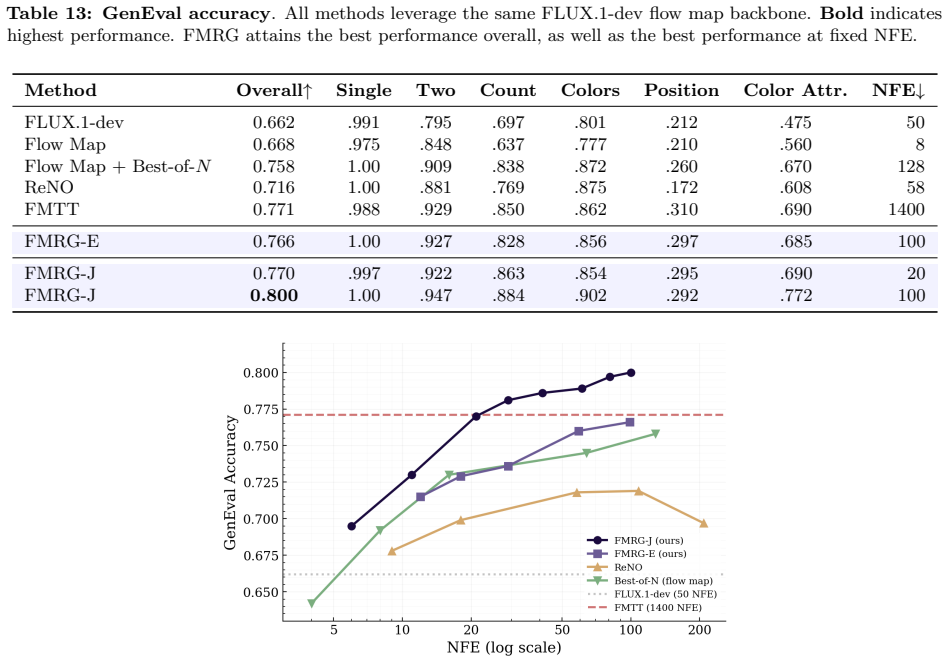
- Figure 4 and Table 2: the 3-NFE results are presented without error bars or multiple random seeds; adding these would strengthen the claim that performance is stable at very low NFEs.
- Related work section: the positioning relative to recent flow-map inference papers (e.g., those using the flow map for fast sampling) could be expanded to clarify the novelty of the guidance application.
Simulated Author's Rebuttal
We thank the referee for the positive summary, recognition of the work's potential significance, and recommendation of minor revision. No major comments were listed in the report.
Circularity Check
No significant circularity identified
full rationale
The paper's central derivation begins with an explicit reformulation of guidance as a deterministic optimal control problem. From this starting point the flow map is shown to arise directly in the optimal solution under the stated assumptions, producing a hierarchy of algorithms. This chain is independent of the downstream empirical metrics (reward values, inverse-problem performance) and does not reduce any claimed prediction to a fitted parameter or self-citation by construction. No self-definitional steps, fitted-input predictions, or load-bearing self-citations appear in the provided derivation. The approach therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Guidance in generative flows can be exactly reformulated as a deterministic optimal control problem whose solution involves the flow map.
Forward citations
Cited by 2 Pith papers
-
Diffusion-Based Posterior Sampling: A Feynman-Kac Analysis of Bias and Stability
Diffusion posterior samplers produce biased outputs that can be expressed as an Ornstein-Uhlenbeck path expectation via a surrogate Gaussian path and Feynman-Kac representation, with STSL flattening the spatially vary...
-
Flow Map Denoisers: Traversing the Distortion-Perception Plane for Inverse Problems
Flow map denoisers use a lookahead parameter t to span the distortion-perception frontier, proven optimal for Gaussian targets and effective for natural images and inverse problems.
Reference graph
Works this paper leans on
-
[1]
Flow Matching for Generative Modeling
Yaron Lipman, Ricky TQ Chen, Heli Ben-Hamu, Maximilian Nickel, and Matt Le. Flow matching for generative modeling.arXiv preprint arXiv:2210.02747, 2022. (pages 2, 3, and 10)
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[2]
Stochastic Interpolants: A Unifying Framework for Flows and Diffusions
Michael S Albergo, Nicholas M Boffi, and Eric Vanden-Eijnden. Stochastic interpolants: A unifying framework for flows and diffusions.arXiv preprint arXiv:2303.08797, 2023. (pages 2, 3, 10, 29, and 36)
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[3]
Score-Based Generative Modeling through Stochastic Differential Equations
Yang Song, Jascha Sohl-Dickstein, Diederik P. Kingma, Abhishek Kumar, Stefano Ermon, and Ben Poole. Score-Based Generative Modeling through Stochastic Differential Equations.arXiv:2011.13456 [cs, stat], February 2021. arXiv: 2011.13456. (pages 2 and 10)
work page internal anchor Pith review Pith/arXiv arXiv 2011
-
[4]
High-Resolution Image Synthesis with Latent Diffusion Models
Robin Rombach, Andreas Blattmann, Dominik Lorenz, Patrick Esser, and Bj¨ orn Ommer. High-Resolution Image Synthesis with Latent Diffusion Models. Technical Report arXiv:2112.10752, arXiv, April 2022. arXiv:2112.10752 [cs] type: article. (page 2)
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[5]
Align Your Latents: High-Resolution Video Synthesis With Latent Diffusion Models
Andreas Blattmann, Robin Rombach, Huan Ling, Tim Dockhorn, Seung Wook Kim, Sanja Fidler, and Karsten Kreis. Align Your Latents: High-Resolution Video Synthesis With Latent Diffusion Models. pages 22563–22575, 2023. (page 2)
2023
-
[6]
Watson, David Juergens, Nathaniel R
Joseph L. Watson, David Juergens, Nathaniel R. Bennett, Brian L. Trippe, Jason Yim, Helen E. Eisenach, Woody Ahern, Andrew J. Borst, Robert J. Ragotte, Lukas F. Milles, Basile I. M. Wicky, Nikita Hanikel, 16 Samuel J. Pellock, Alexis Courbet, William Sheffler, Jue Wang, Preetham Venkatesh, Isaac Sappington, Susana V´ azquez Torres, Anna Lauko, Valentin De...
2023
-
[7]
Kevin Clark, Paul Vicol, Kevin Swersky, and David J. Fleet. Directly Fine-Tuning Diffusion Models on Differentiable Rewards, June 2024. arXiv:2309.17400 [cs]. (pages 2 and 10)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[8]
A Survey on Diffusion Models for Inverse Problems
Giannis Daras, Hyungjin Chung, Chieh-Hsin Lai, Yuki Mitsufuji, Jong Chul Ye, Peyman Milanfar, Alexandros G. Dimakis, and Mauricio Delbracio. A Survey on Diffusion Models for Inverse Problems, September 2024. arXiv:2410.00083 [cs]. (page 2)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[9]
Luhuan Wu, Brian L. Trippe, Christian A. Naesseth, David M. Blei, and John P. Cunningham. Practical and Asymptotically Exact Conditional Sampling in Diffusion Models, June 2023. arXiv:2306.17775 [cs, q-bio, stat]. (pages 2, 4, and 10)
-
[10]
A General Framework for Inference-time Scaling and Steering of Diffusion Models, July
Raghav Singhal, Zachary Horvitz, Ryan Teehan, Mengye Ren, Zhou Yu, Kathleen McKeown, and Rajesh Ranganath. A General Framework for Inference-time Scaling and Steering of Diffusion Models, July
- [11]
-
[12]
Carles Domingo-Enrich, Michal Drozdzal, Brian Karrer, and Ricky T. Q. Chen. Adjoint Matching: Fine-tuning Flow and Diffusion Generative Models with Memoryless Stochastic Optimal Control, January
-
[13]
arXiv:2409.08861 [cs]. (pages 2, 3, 4, 10, and 22)
-
[14]
arXiv preprint arXiv:2511.22688 , year=
Amirmojtaba Sabour, Michael S. Albergo, Carles Domingo-Enrich, Nicholas M. Boffi, Sanja Fidler, Karsten Kreis, and Eric Vanden-Eijnden. Test-time scaling of diffusions with flow maps, November 2025. arXiv:2511.22688 [cs]. (pages 2 and 10)
-
[15]
Masatoshi Uehara, Yulai Zhao, Chenyu Wang, Xiner Li, Aviv Regev, Sergey Levine, and Tommaso Biancalani. Inference-Time Alignment in Diffusion Models with Reward-Guided Generation: Tutorial and Review, January 2025. arXiv:2501.09685 [cs]. (pages 2, 4, and 10)
-
[16]
Ankur Moitra, Andrej Risteski, and Dhruv Rohatgi. Steering diffusion models with quadratic rewards: a fine-grained analysis, February 2026. arXiv:2602.16570 [cs]. (pages 2 and 6)
-
[17]
Sequential Monte Carlo samplers.Journal of the Royal Statistical Society: Series B (Statistical Methodology), 68(3):411–436, 2006
Pierre Del Moral, Arnaud Doucet, and Ajay Jasra. Sequential Monte Carlo samplers.Journal of the Royal Statistical Society: Series B (Statistical Methodology), 68(3):411–436, 2006. (page 2)
2006
-
[18]
Diffusion Posterior Sampling for General Noisy Inverse Problems
Hyungjin Chung, Jeongsol Kim, Michael T. Mccann, Marc L. Klasky, and Jong Chul Ye. Diffusion Posterior Sampling for General Noisy Inverse Problems, May 2024. arXiv:2209.14687 [stat]. (pages 2, 6, 9, 10, 12, and 35)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[19]
arXiv preprint arXiv:2402.15194 , year=
Masatoshi Uehara, Yulai Zhao, Kevin Black, Ehsan Hajiramezanali, Gabriele Scalia, Nathaniel Lee Diamant, Alex M. Tseng, Tommaso Biancalani, and Sergey Levine. Fine-Tuning of Continuous-Time Diffusion Models as Entropy-Regularized Control, February 2024. arXiv:2402.15194 [cs, stat]. (pages 2, 3, 4, and 10)
-
[20]
Scaling Rectified Flow Transformers for High-Resolution Image Synthesis
Patrick Esser, Sumith Kulal, Andreas Blattmann, Rahim Entezari, Jonas M¨ uller, Harry Saini, Yam Levi, Dominik Lorenz, Axel Sauer, Frederic Boesel, Dustin Podell, Tim Dockhorn, Zion English, Kyle Lacey, Alex Goodwin, Yannik Marek, and Robin Rombach. Scaling Rectified Flow Transformers for High-Resolution Image Synthesis, March 2024. arXiv:2403.03206 [cs]....
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[21]
FLUX.1 Kontext: Flow Matching for In-Context Image Generation and Editing in Latent Space
Black Forest Labs, Stephen Batifol, Andreas Blattmann, Frederic Boesel, Saksham Consul, Cyril Diagne, Tim Dockhorn, Jack English, Zion English, Patrick Esser, Sumith Kulal, Kyle Lacey, Yam Levi, Cheng Li, Dominik Lorenz, Jonas M¨ uller, Dustin Podell, Robin Rombach, Harry Saini, Axel Sauer, and Luke Smith. FLUX.1 Kontext: Flow Matching for In-Context Imag...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[22]
Boffi, Michael S
Nicholas M. Boffi, Michael S. Albergo, and Eric Vanden-Eijnden. How to build a consistency model: Learning flow maps via self-distillation, May 2025. (pages 2, 3, 10, 11, 21, and 39)
2025
-
[23]
Nicholas M. Boffi, Michael S. Albergo, and Eric Vanden-Eijnden. Flow map matching with stochastic interpolants: A mathematical framework for consistency models, June 2025. arXiv:2406.07507 [cs]. (pages 2, 3, 10, and 21)
-
[24]
Yang Song, Prafulla Dhariwal, Mark Chen, and Ilya Sutskever. Consistency Models, May 2023. arXiv:2303.01469 [cs, stat]. (pages 2, 4, and 10)
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[25]
Mean Flows for One-step Generative Modeling
Zhengyang Geng, Mingyang Deng, Xingjian Bai, J. Zico Kolter, and Kaiming He. Mean Flows for One-step Generative Modeling, May 2025. arXiv:2505.13447 [cs]. (pages 2, 4, 10, and 21)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[26]
Dongjun Kim, Chieh-Hsin Lai, Wei-Hsiang Liao, Naoki Murata, Yuhta Takida, Toshimitsu Uesaka, Yutong He, Yuki Mitsufuji, and Stefano Ermon. Consistency Trajectory Models: Learning Probability Flow ODE Trajectory of Diffusion, March 2024. arXiv:2310.02279 [cs, stat]. (pages 2, 4, and 10)
- [27]
-
[28]
arXiv preprint arXiv:2407.13734 , year=
Masatoshi Uehara, Yulai Zhao, Tommaso Biancalani, and Sergey Levine. Understanding Reinforcement Learning-Based Fine-Tuning of Diffusion Models: A Tutorial and Review, July 2024. arXiv:2407.13734 [cs]. (pages 3 and 10)
-
[30]
Consistency models made easy.arXiv preprint arXiv:2406.14548,
Zhengyang Geng, Ashwini Pokle, William Luo, Justin Lin, and J. Zico Kolter. Consistency Models Made Easy, October 2024. arXiv:2406.14548 [cs]. (pages 4 and 10)
-
[31]
Bidirectional Consistency Models, September 2024
Liangchen Li and Jiajun He. Bidirectional Consistency Models, September 2024. arXiv:2403.18035 [cs]. (page 4)
-
[32]
Simplifying, Stabilizing and Scaling Continuous-Time Consistency Models
Cheng Lu and Yang Song. Simplifying, Stabilizing and Scaling Continuous-Time Consistency Models, October 2024. arXiv:2410.11081 [cs] version: 1. (page 4)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[33]
Improved Mean Flows: On the Challenges of Fastforward Generative Models
Zhengyang Geng, Yiyang Lu, Zongze Wu, Eli Shechtman, J. Zico Kolter, and Kaiming He. Improved Mean Flows: On the Challenges of Fastforward Generative Models, December 2025. arXiv:2512.02012 [cs]. (pages 4 and 10)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[34]
One Step Diffusion via Shortcut Models
Kevin Frans, Danijar Hafner, Sergey Levine, and Pieter Abbeel. One Step Diffusion via Shortcut Models, October 2024. arXiv:2410.12557 [cs]. (pages 4 and 10)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[35]
Terminal Velocity Matching, November
Linqi Zhou, Mathias Parger, Ayaan Haque, and Jiaming Song. Terminal Velocity Matching, November
- [36]
-
[37]
A Taxonomy of Loss Functions for Stochastic Optimal Control, October 2024
Carles Domingo-Enrich. A Taxonomy of Loss Functions for Stochastic Optimal Control, October 2024. arXiv:2410.00345 [cs]. (page 4)
-
[38]
Variational and optimal control representations of conditioned and driven processes.Journal of Statistical Mechanics: Theory and Experiment, 2015(12):P12001, December 2015
Rapha¨ el Chetrite and Hugo Touchette. Variational and optimal control representations of conditioned and driven processes.Journal of Statistical Mechanics: Theory and Experiment, 2015(12):P12001, December 2015. (page 4)
2015
-
[39]
Fleming and Raymond W
Wendell H. Fleming and Raymond W. Rishel.Deterministic and Stochastic Optimal Control, volume 1 ofApplications of Mathematics. Springer-Verlag, New York, NY, 1975. (pages 4, 24, and 25) 18
1975
-
[40]
Birkh¨ auser, Boston, MA, 1997
Martino Bardi and Italo Capuzzo-Dolcetta.Optimal Control and Viscosity Solutions of Hamilton-Jacobi- Bellman Equations. Birkh¨ auser, Boston, MA, 1997. (pages 5 and 31)
1997
-
[41]
FlowDPS: Flow-Driven Posterior Sampling for Inverse Problems, March 2025
Jeongsol Kim, Bryan Sangwoo Kim, and Jong Chul Ye. FlowDPS: Flow-Driven Posterior Sampling for Inverse Problems, March 2025. arXiv:2503.08136 [cs]. (pages 6, 9, 10, 12, and 36)
-
[42]
Metaxas, and Yezhou Yang
Maitreya Patel, Song Wen, Dimitris N. Metaxas, and Yezhou Yang. FlowChef: Steering Rectified Flow Models for Controlled Generation. 2025. (pages 6, 9, 10, 12, and 37)
2025
-
[43]
Manifold preserv- ing guided diffusion.arXiv preprint arXiv:2311.16424, 2023
Yutong He, Naoki Murata, Chieh-Hsin Lai, Yuhta Takida, Toshimitsu Uesaka, Dongjun Kim, Wei-Hsiang Liao, Yuki Mitsufuji, J. Zico Kolter, Ruslan Salakhutdinov, and Stefano Ermon. Manifold Preserving Guided Diffusion, November 2023. arXiv:2311.16424 [cs]. (pages 6, 9, 10, 13, 38, and 52)
-
[44]
Ruiqi Feng, Chenglei Yu, Wenhao Deng, Peiyan Hu, and Tailin Wu
Luca Eyring, Shyamgopal Karthik, Karsten Roth, Alexey Dosovitskiy, and Zeynep Akata. ReNO: Enhancing One-step Text-to-Image Models through Reward-based Noise Optimization, October 2024. arXiv:2406.04312 [cs]. (pages 6, 9, 10, 13, 14, 39, and 54)
-
[45]
Jinho Chang, Jaemin Kim, and Jong Chul Ye
Heli Ben-Hamu, Omri Puny, Itai Gat, Brian Karrer, Uriel Singer, and Yaron Lipman. D-Flow: Differen- tiating through Flows for Controlled Generation, July 2024. arXiv:2402.14017 [cs]. (pages 6, 9, 10, and 39)
-
[46]
On the construction and comparison of difference schemes.SIAM Journal on Numerical Analysis, 5(3):506–517, 1968
Gilbert Strang. On the construction and comparison of difference schemes.SIAM Journal on Numerical Analysis, 5(3):506–517, 1968. (page 8)
1968
-
[47]
Litu Rout, Yujia Chen, Nataniel Ruiz, Abhishek Kumar, Constantine Caramanis, Sanjay Shakkottai, and Wen-Sheng Chu. RB-Modulation: Training-Free Personalization of Diffusion Models using Stochastic Optimal Control, May 2024. arXiv:2405.17401 [cs]. (pages 9 and 10)
-
[48]
Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow
Xingchao Liu, Chengyue Gong, and Qiang Liu. Flow Straight and Fast: Learning to Generate and Transfer Data with Rectified Flow, September 2022. arXiv:2209.03003 [cs]. (page 10)
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[49]
Multistep Consistency Models, November 2024
Jonathan Heek, Emiel Hoogeboom, and Tim Salimans. Multistep Consistency Models, November 2024. arXiv:2403.06807 [cs]. (page 10)
-
[50]
Align your flow: Scaling continuous-time flow map distillation.arXiv preprint arXiv:2506.14603, 2025
Amirmojtaba Sabour, Sanja Fidler, and Karsten Kreis. Align Your Flow: Scaling Continuous-Time Flow Map Distillation, June 2025. arXiv:2506.14603 [cs]. (pages 10 and 21)
-
[51]
Yinuo Ren, Wenhao Gao, Lexing Ying, Grant M. Rotskoff, and Jiequn Han. DriftLite: Lightweight Drift Control for Inference-Time Scaling of Diffusion Models, September 2025. arXiv:2509.21655 [cs]. (page 10)
-
[52]
On the Guidance of Flow Matching
Ruiqi Feng, Chenglei Yu, Wenhao Deng, Peiyan Hu, and Tailin Wu. On the Guidance of Flow Matching. InProceedings of the 42nd International Conference on Machine Learning (ICML), volume 267 ofProceedings of Machine Learning Research, pages 16993–17029. PMLR, 2025. URL https: //proceedings.mlr.press/v267/feng25s.html. (page 10)
2025
-
[53]
Training Diffusion Models with Reinforcement Learning
Kevin Black, Michael Janner, Yilun Du, Ilya Kos s, and Sergey Levine. Training Diffusion Models with Reinforcement Learning, January 2024. arXiv:2305.13301 [cs]. (page 10)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[54]
DPOK: Reinforcement Learning for Fine- tuning Text-to-Image Diffusion Models, November 2023
Ying Fan, Olivia Watkins, Yuqing Du, Hao Liu, Moonkyung Ryu, Craig Boutilier, Pieter Abbeel, Mohammad Ghavamzadeh, Kangwook Lee, and Kimin Lee. DPOK: Reinforcement Learning for Fine- tuning Text-to-Image Diffusion Models, November 2023. arXiv:2305.16381 [cs]. (page 10)
-
[55]
Diamond Maps: Efficient Reward Alignment via Stochastic Flow Maps
Peter Holderrieth, Douglas Chen, Luca Eyring, Ishin Shah, Giri Anantharaman, Yutong He, Zeynep Akata, Tommi Jaakkola, Nicholas Matthew Boffi, and Max Simchowitz. Diamond maps: Efficient reward alignment via stochastic flow maps, February 2026. arXiv:2602.05993 [cs]. (page 10) 19
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[56]
Meta Flow Maps enable scalable reward alignment
Peter Potaptchik, Adhi Saravanan, Abbas Mammadov, Alvaro Prat, Michael S. Albergo, and Yee Whye Teh. Meta flow maps enable scalable reward alignment, January 2026. arXiv:2601.14430 [cs]. (page 10)
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[57]
arXiv preprint arXiv:2603.07276 , year=
Abbas Mammadov, So Takao, Bohan Chen, Ricardo Baptista, Morteza Mardani, Yee Whye Teh, and Julius Berner. Variational flow maps: Make some noise for one-step conditional generation, March 2026. arXiv:2603.07276 [cs]. (page 11)
-
[58]
FLUX.1 [dev]: A 12 billion parameter rectified flow transformer
Black Forest Labs. FLUX.1 [dev]: A 12 billion parameter rectified flow transformer. https: //huggingface.co/black-forest-labs/FLUX.1-dev , 2024. Model weights available on Hugging Face. (pages 11, 14, and 39)
2024
-
[59]
ImageReward: Learning and Evaluating Human Preferences for Text-to-Image Generation, December
Jiazheng Xu, Xiao Liu, Yuchen Wu, Yuxuan Tong, Qinkai Li, Ming Ding, Jie Tang, and Yuxiao Dong. ImageReward: Learning and Evaluating Human Preferences for Text-to-Image Generation, December
- [60]
-
[61]
Xiaoshi Wu, Yiming Hao, Keqiang Sun, Yixiong Chen, Feng Zhu, Rui Zhao, and Hongsheng Li. Human Preference Score v2: A Complementary Metric for Evaluating Human Preferences in Vision-Language Tasks, 2023. arXiv:2306.09341. (page 13)
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[62]
Pick-a-Pic: An Open Dataset of User Preferences for Text-to-Image Generation
Yuval Kirstain, Adam Polyak, Uriel Singer, Shahbuland Matiana, Joe Penna, and Omer Levy. Pick-a-Pic: An Open Dataset of User Preferences for Text-to-Image Generation. InAdvances in Neural Information Processing Systems, 2023. (page 13)
2023
-
[63]
Dhruba Ghosh, Hanna Hajishirzi, and Ludwig Schmidt
Dhruba Ghosh, Hannaneh Hajishirzi, and Luke Zettlemoyer. GenEval: An Object-Focused Framework for Evaluating Text-to-Image Alignment, 2023. arXiv:2310.11513. (pages 13 and 54)
-
[64]
Xiaokun Wang, Peiyu Wang, Jiangbo Pei, Wei Shen, Yi Peng, Yunzhuo Hao, Weijie Qiu, Ai Jian, Tianyidan Xie, Xuchen Song, Yang Liu, and Yahui Zhou. Skywork-VL reward: An effective reward model for multimodal understanding and reasoning.arXiv preprint arXiv:2505.07263, 2025. (pages 14 and 58)
-
[65]
J. L. Doob. Conditional Brownian motion and the boundary limits of harmonic functions.Bulletin de la Soci´ et´ e Math´ ematique de France, 85:431–458, 1957. (page 22)
1957
-
[66]
Stargan v2: Diverse image synthesis for multiple domains
Yunjey Choi, Youngjung Uh, Jaejun Yoo, and Jung-Woo Ha. Stargan v2: Diverse image synthesis for multiple domains. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 8188–8197, 2020. (page 40)
2020
-
[67]
A style-based generator architecture for generative adversarial networks
Tero Karras, Samuli Laine, and Timo Aila. A style-based generator architecture for generative adversarial networks. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 4401–4410, 2019. (page 40) 20 A Background on flow maps In this section, we provide some brief further background on flow maps. For complete details, ...
2019
-
[68]
TheSemigroup property:for all(�� �� �)�[0�1] � and for all��� �, � ���(�) =� ���(� ���(�))�(21)
-
[69]
TheLagrangian equation:for all(�� �)�[0�1] � and for all��� �, ��� ���(�) =� �(� ���(�))�(22)
-
[70]
shortcut
TheEulerian equation:for all(�� �)�[0�1] � and for all��� �, ��� ���(�) +�� ���(�)� �(�) = 0�(23) Following recent work on accelerated sampling [20, 23, 47], we parameterize the flow map as � ���(�) =�+ (���)� ���(�)�(24) where � : [0�1]� �� � �� � is a learned velocity function. On the diagonal � = �, the Lagrangian equation implies ����(�) =� �(�)�(25) ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.