A Virtual Fencing Framework for Safe and Efficient Collaborative Robotics
Pith reviewed 2026-05-22 23:14 UTC · model grok-4.3
The pith
A virtual fencing framework uses motion prediction to let collaborative robots operate with fewer pauses while meeting safety requirements.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By modeling safety and performance tradeoffs as an optimization problem solved via sequential quadratic programming, the virtual fencing framework detects and predicts human motion to ensure safe cobot operation while minimizing operational pauses.
What carries the argument
The virtual fencing approach that creates dynamic boundaries based on predicted human positions, with the optimization problem solved by sequential quadratic programming to balance safety constraints and robot productivity.
Load-bearing premise
Human motion can be detected and predicted accurately enough in real time to provide reliable inputs for the optimization.
What would settle it
A test where human movements are unpredictable or detection fails, causing either safety violations or no reduction in pauses, would disprove the effectiveness of the virtual fencing method.
Figures

read the original abstract
Collaborative robots (cobots) increasingly operate alongside humans, demanding robust real-time safeguarding. Current safety standards (e.g., ISO 10218, ANSI/RIA 15.06, ISO/TS 15066) require risk assessments but offer limited guidance for real-time responses. We propose a virtual fencing approach that detects and predicts human motion, ensuring safe cobot operation. Safety and performance tradeoffs are modeled as an optimization problem and solved via sequential quadratic programming. Experimental validation shows that our method minimizes operational pauses while maintaining safety, providing a modular solution for human-robot collaboration.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a virtual fencing framework for collaborative robots that detects and predicts human motion to enforce safety. Safety-performance tradeoffs are modeled as an optimization problem solved via sequential quadratic programming. The central claim is that experimental validation demonstrates the method minimizes operational pauses while maintaining safety, yielding a modular solution for human-robot collaboration aligned with standards such as ISO/TS 15066.
Significance. If substantiated with quantitative results, the framework could address the limited real-time guidance in existing safety standards by offering a flexible, solver-based approach to balancing safety envelopes with reduced downtime in cobot applications. The modular formulation is a potential strength for integration with existing systems.
major comments (2)
- [Abstract] Abstract: the assertion of 'experimental validation' that the method 'minimizes operational pauses while maintaining safety' is unsupported; the text supplies no data, error bars, comparison baselines, quantitative metrics on pause reduction or safety violations, or details on the tested conditions.
- [Abstract] Abstract: the SQP formulation is presented as deterministic with no explicit uncertainty set or robust counterpart; because the approach depends on real-time human-motion estimates as inputs, the absence of reported bounds on prediction error, sensor latency, or false-negative rates leaves the safety and efficiency claims without quantitative grounding.
minor comments (1)
- The abstract would be strengthened by briefly indicating the human-motion sensing modality and prediction horizon employed.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We agree that the abstract requires revision to better substantiate its claims with quantitative details from the experiments and to address uncertainty considerations in the SQP formulation. We respond to each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion of 'experimental validation' that the method 'minimizes operational pauses while maintaining safety' is unsupported; the text supplies no data, error bars, comparison baselines, quantitative metrics on pause reduction or safety violations, or details on the tested conditions.
Authors: The manuscript includes a dedicated experimental evaluation section that compares the virtual fencing approach against standard safety baselines, reporting metrics such as operational pause durations and safety violation counts under controlled human-robot interaction scenarios. We acknowledge that the abstract does not convey these specifics. In the revised manuscript we will update the abstract to include key quantitative results, including pause reduction percentages, safety compliance rates, and a brief description of the tested conditions and baselines. revision: yes
-
Referee: [Abstract] Abstract: the SQP formulation is presented as deterministic with no explicit uncertainty set or robust counterpart; because the approach depends on real-time human-motion estimates as inputs, the absence of reported bounds on prediction error, sensor latency, or false-negative rates leaves the safety and efficiency claims without quantitative grounding.
Authors: The current SQP formulation is indeed deterministic and relies on point estimates of human motion. Conservative safety margins are applied in the optimization to mitigate prediction inaccuracies, but explicit bounds on prediction error, latency, and false-negative rates are not reported. We will revise the manuscript to add a discussion of the motion prediction module's observed error statistics from the experiments, sensor latency characteristics, and how these inform the chosen safety margins, thereby providing quantitative grounding for the safety claims. revision: yes
Circularity Check
No circularity; optimization and validation are independent of fitted self-definitions.
full rationale
The paper poses safety/performance tradeoffs as an optimization problem solved externally via sequential quadratic programming and reports experimental outcomes. No equations reduce a claimed prediction to a fitted parameter by construction, no self-citation chain supplies a load-bearing uniqueness result, and no ansatz is smuggled via prior work. The human-motion prediction step is treated as an external input whose accuracy is an assumption, not a derived quantity that loops back to itself. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
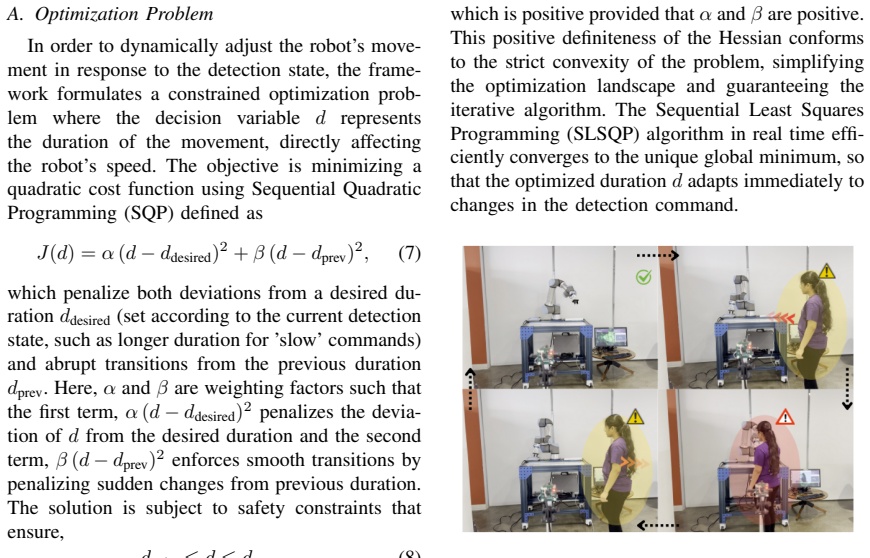
Safety and performance tradeoffs are modeled as an optimization problem and solved via sequential quadratic programming... J(d) = α(d−ddesired)² + β(d−dprev)² subject to dmin≤d≤dmax
-
IndisputableMonolith/Foundation/DimensionForcing.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The image is vertically divided into three distinct zones... critical zone [W/4,3W/4]... increased attention zone
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Making appearances: How robots should approach people,
M. Joosse, M. Lohse, N. V . Berkel, A. Sardar, and V . Ev- ers, “Making appearances: How robots should approach people,” vol. 10, no. 1, pp. 1–24, 2021
work page 2021
-
[2]
Uncertainty estimation for safe human-robot collaboration using con- servation measures,
W.-J. Baek, C. Ledermann, and T. Kr ¨oger, “Uncertainty estimation for safe human-robot collaboration using con- servation measures,” in 17th Int. Conf. Intel. Auton. Sys. Springer, 2023, pp. 85–102
work page 2023
-
[3]
Evaluation of soft- ware solutions for risk assessment focusing on human- robot collaboration,
L. Hornung, C. Wurll, and B. Hein, “Evaluation of soft- ware solutions for risk assessment focusing on human- robot collaboration,” in 17th Int. Conf. Intel. Auton. Sys. Springer, 2023, pp. 3–14
work page 2023
-
[4]
Safety prioritization by iterative feedback linearization control for collaborative robots,
A. Arab, Y . Mousavi, K. Yu, and I. B. Kucukdemiral, “Safety prioritization by iterative feedback linearization control for collaborative robots,” in 2024 IEEE Conference on Control Technology and Applications (CCTA) . IEEE, 2024, pp. 811–816
work page 2024
-
[5]
Safe obsta- cle avoidance for industrial robot working without fences,
N. Pedrocchi, M. Malosio, and L. M. Tosatti, “Safe obsta- cle avoidance for industrial robot working without fences,” in 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems , 2009, pp. 3435–3440
work page 2009
-
[6]
T. Vu, D.-T. Nguyen, D.-T. Nguyen, T. Vu Toan, and V .-T. Tran, “Real-time detection to avoid accidents of interaction between humans and collaborative robot us- ing image processing and machine learning,” in 2024 IEEE International Conference on Computing, Cybernetics and Cyber-Medical Systems (ICCC) . IEEE, 2024, pp. 000 229–000 232
work page 2024
-
[7]
An approach for adapting a cobot workstation to human operator within a deep learning camera,
O. D. Miguel L ´azaro, W. M. Mohammed, B. R. Ferrer, R. Bejarano, and J. L. Martinez Lastra, “An approach for adapting a cobot workstation to human operator within a deep learning camera,” in 2019 IEEE 17th International Conference on Industrial Informatics (INDIN) , vol. 1, 2019, pp. 789–794
work page 2019
-
[8]
En- hancing human cobot interaction with mixed reality: A futuristic review,
R. R, R. R. Sathya, S. V , J. L. N, and G. S, “En- hancing human cobot interaction with mixed reality: A futuristic review,” in2023 2nd International Conference on Advancements in Electrical, Electronics, Communication, Computing and Automation (ICAECA) , 2023, pp. 1–6
work page 2023
-
[9]
Dynamic safety system for collaboration of operators and industrial robots,
T. Malm, T. Salmi, I. Marstio, and J. Montonen, “Dynamic safety system for collaboration of operators and industrial robots,” Open Engineering, vol. 9, no. 1, pp. 61–71, 2019
work page 2019
-
[10]
C. Byner, B. Matthias, and H. Ding, “Dynamic speed and separation monitoring for collaborative robot applications – concepts and performance,” Robotics and Computer- Integrated Manufacturing, vol. 58, pp. 239–252, 2019
work page 2019
-
[11]
P. Karagiannis, N. Kousi, G. Michalos, K. Dimoulas, K. Mparis, D. Dimosthenopoulos, ¨Onder Tokc ¸alar, T. Guasch, G. P. Gerio, and S. Makris, “Adaptive speed and separation monitoring based on switching of safety zones for effective human robot collaboration,” Robotics and Computer-Integrated Manufacturing, vol. 77, p. 102361, 2022
work page 2022
-
[12]
Sensor-based con- trol for collaborative robots: Fundamentals, challenges, and opportunities,
A. Cherubini and D. Navarro-Alarcon, “Sensor-based con- trol for collaborative robots: Fundamentals, challenges, and opportunities,” Frontiers in Neurorobotics, vol. 14, p. 576846, 2021
work page 2021
-
[13]
M. Bdiwi, “Integrated sensors system for human safety during cooperating with industrial robots for handing-over and assembling tasks,” Procedia CIRP, vol. 23, pp. 65–70, 2014, 5th CATS 2014 - CIRP Conference on Assembly Technologies and Systems
work page 2014
-
[14]
Review of vision-based safety systems for human-robot collaboration,
“Review of vision-based safety systems for human-robot collaboration,”Procedia CIRP, vol. 72, pp. 111–116, 2018, 51st CIRP Conference on Manufacturing Systems
work page 2018
-
[15]
A multimodal approach to human safety in collaborative robotic workcells,
M. Costanzo, G. De Maria, G. Lettera, and C. Natale, “A multimodal approach to human safety in collaborative robotic workcells,” IEEE Transactions on Automation Sci- ence and Engineering, vol. 19, no. 2, pp. 1202–1216, 2022
work page 2022
-
[16]
U. B. Himmelsbach, T. M. Wendt, N. Hangst, P. Gawron, and L. Stiglmeier, “Human–machine differentiation in speed and separation monitoring for improved efficiency in human–robot collaboration,” Sensors, vol. 21, no. 21, 2021
work page 2021
-
[17]
Camera- based safety system for collaborative assembly,
E. Chebotareva, M. Mustafin, R. Safin et al. , “Camera- based safety system for collaborative assembly,” Journal of Intelligent Manufacturing , 2024
work page 2024
-
[18]
A new mechanism for collision detection in human–robot collaboration using deep learning techniques,
I. R. Rodrigues, G. Barbosa, A. O. Filho et al. , “A new mechanism for collision detection in human–robot collaboration using deep learning techniques,” Journal of Control, Automation and Electrical Systems , vol. 33, pp. 406–418, 2022
work page 2022
-
[19]
A distributed computing real-time safety system of collaborative robot,
D. Gradolewski, D. Maslowski, D. Dziak, B. Jachimczyk, S. Mundlamuri, C. Prakash, and W. Kulesza, “A distributed computing real-time safety system of collaborative robot,” Elektronika ir Elektrotechnika, vol. 26, pp. 4–14, 04 2020
work page 2020
-
[20]
M. J. Alenjareghi, S. Keivanpour, Y . A. Chinniah, and S. Jocelyn, “Computer vision-enabled real-time job hazard analysis for safe human–robot collaboration in disassembly tasks,” Journal of Intelligent Manufacturing , 2024
work page 2024
-
[21]
Towards global awareness in human-robot-collaborative multi-cell assembly system,
K. Rekik, G. Silva, A. Bashir, and R. M ¨uller, “Towards global awareness in human-robot-collaborative multi-cell assembly system,” in 2024 IEEE 20th International Con- ference on Automation Science and Engineering (CASE) . IEEE, 2024, pp. 5–10
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.