Crazyflow: An Accurate, GPU-Accelerated, Differentiable Drone Simulator in JAX
Pith reviewed 2026-06-28 16:39 UTC · model grok-4.3
The pith
Crazyflow provides a JAX-based GPU simulator for drones that supports direct hardware transfer and in-flight policy training.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
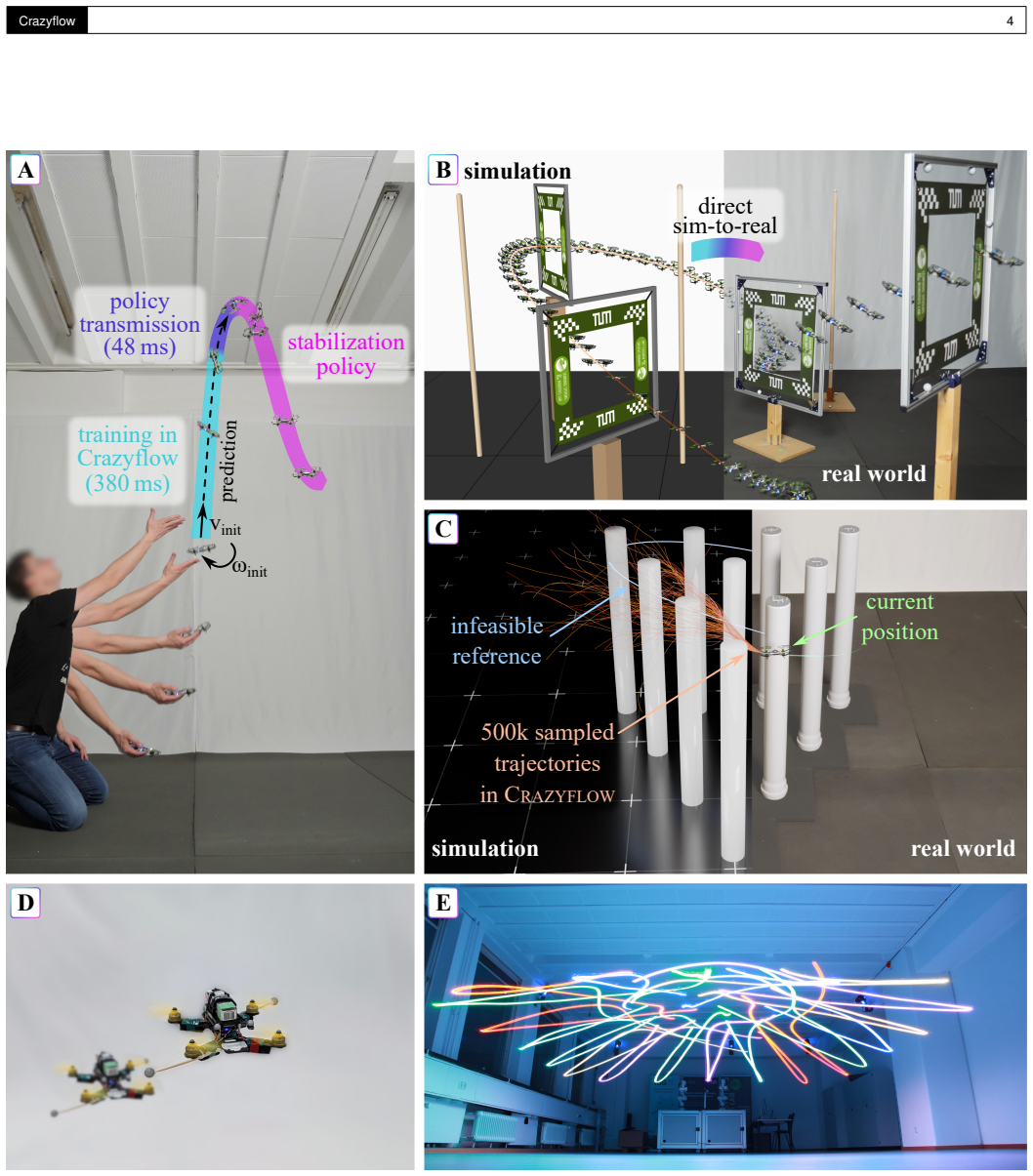
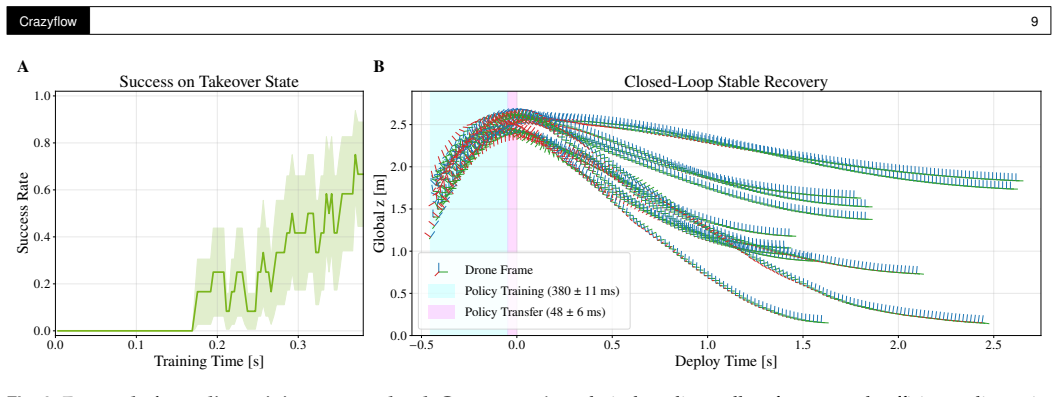
Crazyflow is an accurate, GPU-accelerated, differentiable drone simulator implemented in JAX. It supports multiple levels of simulation abstraction and is compatible with open-source Crazyflie models. The simulator enables both gradient-based and sampling-based methods at scale, with demonstrated sub-centimeter trajectory tracking on real hardware without domain randomization and sampling-based avoidance exceeding half a billion steps per second. Most notably, its speed allows breaking the train-then-deploy paradigm by training a recovery policy from scratch in 0.38 seconds during flight, successfully stabilizing the thrown drone.
What carries the argument
The GPU-accelerated JAX implementation of drone dynamics combined with a lightweight system identification pipeline for custom platforms.
If this is right
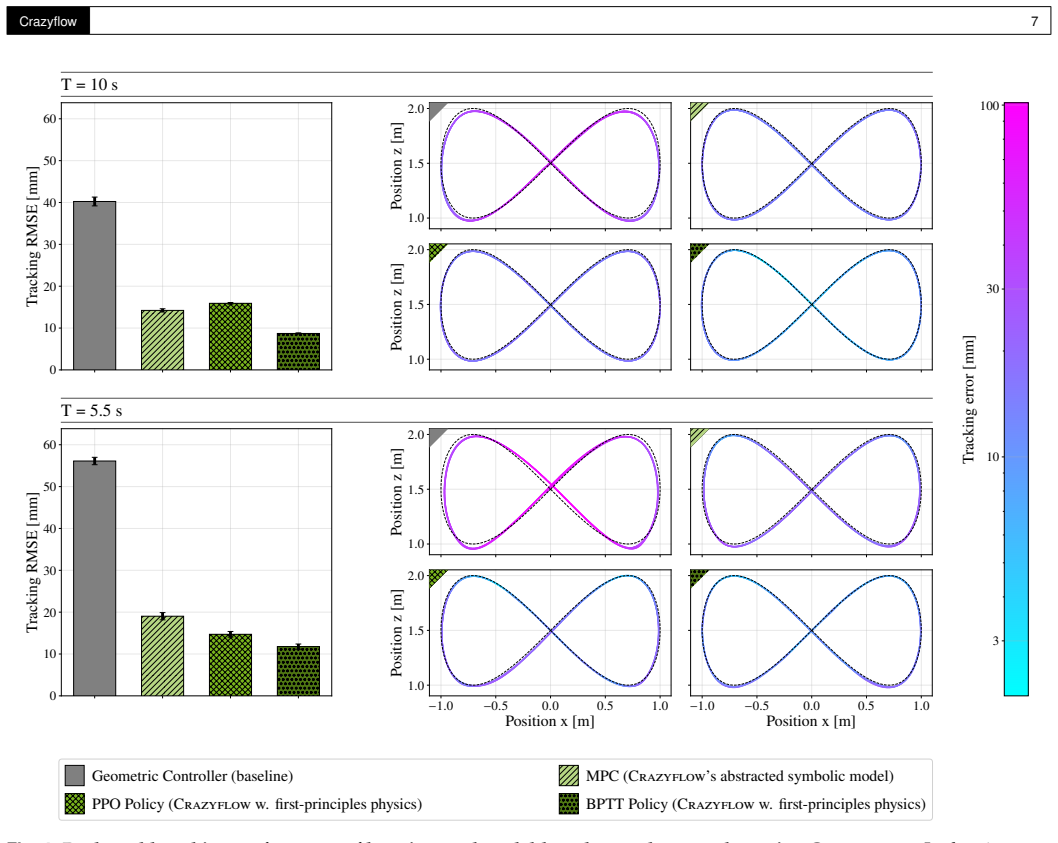
- Sub-centimeter accuracy in trajectory tracking on physical drones using analytical gradients without domain randomization.
- Obstacle avoidance using sampling methods at speeds over 500 million steps per second.
- In-flight reinforcement learning for policy training in 0.38 seconds.
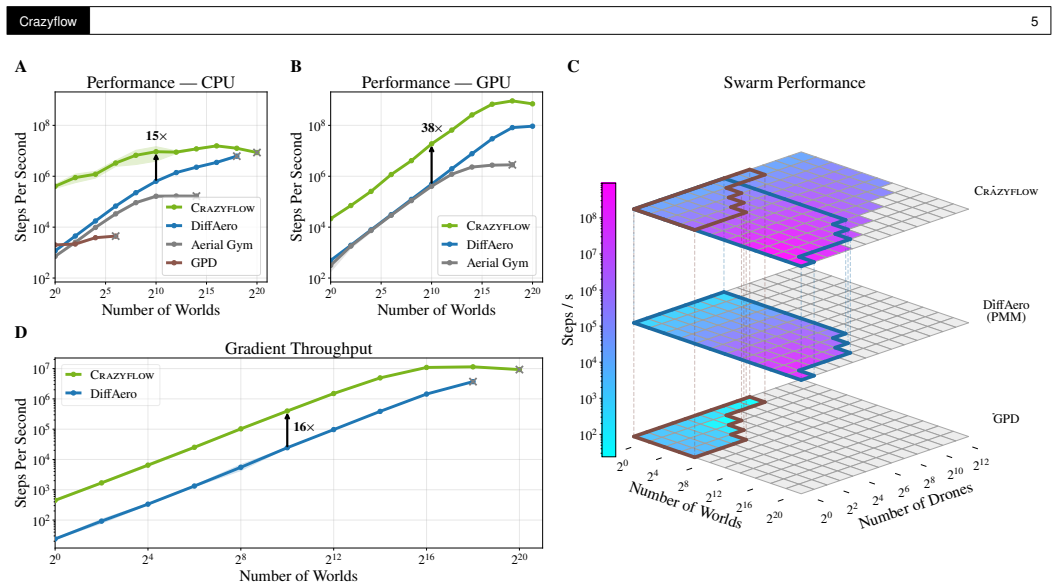
- Simulation of large swarms with thousands of drones each at speeds over an order of magnitude faster than prior simulators.
- Rapid reconfiguration for custom platforms via system identification.
Where Pith is reading between the lines
- The approach could extend to other robotic systems if their dynamics models prove similarly transferable.
- It suggests potential for continuous online optimization of controllers during operation in changing conditions.
- Large-scale parallel simulations might enable training of multi-agent systems with thousands of interacting agents in real time.
Load-bearing premise
The drone dynamics model in the simulator is sufficiently accurate to allow policies to transfer zero-shot to real hardware.
What would settle it
A policy trained only in the simulator that produces more than a few centimeters of tracking error on the physical drone under matching conditions would falsify the zero-shot transfer claim.
Figures


read the original abstract
High-quality, large-scale synthetic data from simulations is becoming a cornerstone for pushing the capabilities of robot algorithms. While aerial robotics simulators have evolved to support specialized needs such as fidelity, differentiability, and swarms independently, a unified platform that can synthesize data across all these domains is missing. In this work, we propose Crazyflow, a simulator designed to push the limits of aerial-robotics algorithm development, from model-based to data-driven methods, gradient-based to sampling-based approaches, and single-agent to multi-agent systems. Compared to existing state-of-the-art drone simulators, it achieves speeds more than an order of magnitude faster for a single drone and can simulate thousands of swarms of 4000 drones each. Real-world experiments show Crazyflow supports both analytical-gradient-based policy learning, achieving sub-centimeter trajectory tracking accuracy without domain randomization, and sampling-based obstacle avoidance at speeds exceeding half a billion steps per second. Breaking the traditional train-then-deploy paradigm, we show that its unprecedented speed even enables in-flight reinforcement learning; we demonstrate this by throwing a physical drone into the air and training a recovery policy from scratch in 0.38 seconds, successfully stabilizing the drone. Crazyflow supports multiple levels of simulation abstraction, is directly compatible with all open-source Crazyflie models, and enables rapid reconfiguration across custom drone platforms and applications by providing a light-weight system identification pipeline. By pushing accuracy, speed, and differentiability simultaneously, Crazyflow serves as an open-source resource for synthetic data generation, with emerging capabilities for large-scale parallelization for online, in-execution learning and optimization, opening the door to novel algorithm development.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Crazyflow, a JAX-based GPU-accelerated differentiable drone simulator compatible with open-source Crazyflie models. It claims speeds over an order of magnitude faster than prior simulators for single drones and support for thousands of 4000-drone swarms, analytical-gradient policy learning with sub-centimeter real-world trajectory tracking without domain randomization, sampling-based obstacle avoidance at >500M steps/sec, and in-flight RL by training a recovery policy from scratch in 0.38s during free-fall on physical hardware. A lightweight system-ID pipeline enables rapid reconfiguration across platforms.
Significance. If the claimed simulation fidelity, zero-shot transfer, and in-flight learning results hold, the work would be significant for aerial robotics by unifying high speed, differentiability, and multi-agent scaling in one open-source platform, enabling large-scale synthetic data generation and novel online optimization methods that break the train-then-deploy paradigm.
major comments (2)
- [Abstract] Abstract: the central claims of sub-centimeter zero-shot trajectory tracking and successful in-flight policy training in 0.38s rest on unverified dynamics fidelity after the described lightweight system identification; no open-loop prediction error, frequency-response match, hold-out trajectory RMSE, or other quantitative sim-to-real validation metrics are reported to isolate model accuracy from task robustness.
- [Abstract] Abstract: the real-world experiments are summarized without baselines, error bars, statistical details, or ablation on the contribution of the JAX differentiability versus the underlying Crazyflie dynamics model, leaving the load-bearing assumption that the simulator is sufficiently accurate for gradient-based transfer untested in the provided evidence.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback emphasizing the importance of quantitative validation for the simulator's dynamics fidelity and clearer experimental reporting. We agree these elements will strengthen the manuscript and will revise accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claims of sub-centimeter zero-shot trajectory tracking and successful in-flight policy training in 0.38s rest on unverified dynamics fidelity after the described lightweight system identification; no open-loop prediction error, frequency-response match, hold-out trajectory RMSE, or other quantitative sim-to-real validation metrics are reported to isolate model accuracy from task robustness.
Authors: We acknowledge that the abstract and current manuscript do not report the specific quantitative sim-to-real metrics requested (open-loop prediction error, frequency-response match, hold-out trajectory RMSE). The full text describes the lightweight system identification pipeline and real-world trajectory tracking results, but does not isolate model accuracy with these metrics. In revision we will add these quantitative validation results, including hold-out RMSE and frequency-domain comparisons, to better support the zero-shot transfer and in-flight learning claims. revision: yes
-
Referee: [Abstract] Abstract: the real-world experiments are summarized without baselines, error bars, statistical details, or ablation on the contribution of the JAX differentiability versus the underlying Crazyflie dynamics model, leaving the load-bearing assumption that the simulator is sufficiently accurate for gradient-based transfer untested in the provided evidence.
Authors: The manuscript summarizes real-world results but does not include the requested baselines, error bars, statistical details, or an ablation isolating JAX differentiability from the base Crazyflie model. We will expand the experimental section in revision to add these elements, including statistical reporting and an ablation study on the contribution of analytical gradients, to provide stronger evidence for the gradient-based transfer results. revision: yes
Circularity Check
No circularity; claims rest on direct empirical measurements against external hardware
full rationale
The paper presents Crazyflow as a JAX-based simulator with a light-weight system ID pipeline and reports real-world transfer results (sub-cm tracking, 0.38 s in-flight RL recovery) as measured outcomes on physical Crazyflie hardware. No equations, first-principles derivations, fitted parameters renamed as predictions, or self-citation chains appear in the abstract or described claims. The central assertions are falsifiable external benchmarks rather than quantities defined in terms of themselves or forced by internal fitting. This matches the default expectation of a non-circular empirical contribution.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
Generative AI for Safe and Photorealistic Drone Light Shows
SWAN generates collision-free drone swarm trajectories from text prompts via video synthesis, adaptive point tracking, planning, and safety filtering, demonstrated in simulation up to 2000 drones and real tests with 4...
Reference graph
Works this paper leans on
-
[1]
Unmanned aerial vehicles for search and rescue: A survey,
M. Lyu, Y . Zhao, C. Huang, and H. Huang, “Unmanned aerial vehicles for search and rescue: A survey,” Remote. Sens.15, 3266:1–35 (2023)
2023
-
[2]
A review on UAV-based remote sensing technologies for construction and civil applications,
S. Guan, Z. Zhu, and G. Wang, “A review on UAV-based remote sensing technologies for construction and civil applications,” Drones6, 117 (2022)
2022
-
[3]
Autonomous drone racing: A survey,
D. Hanover, A. Loquercio, L. Bauersfeld,et al., “Autonomous drone racing: A survey,” IEEE Trans. on Robotics40, 3044–3067 (2024)
2024
-
[4]
High-level multiple-uav cinematography tools for covering outdoor events,
I. Mademlis, V. Mygdalis, N. Nikolaidis,et al., “High-level multiple-uav cinematography tools for covering outdoor events,” IEEE Trans. on Broadcast.65, 627–635 (2019)
2019
-
[5]
So you think Crazyflow 10 you can dance? Rhythmic flight performances with quadrocopters,
A. P . Schoellig, H. Siegel, F . Augugliaro, and R. D’Andrea, “So you think Crazyflow 10 you can dance? Rhythmic flight performances with quadrocopters,” Control. Art: Inq. at Intersect. Subj. Object. pp. 73–105 (2014)
2014
-
[6]
Learning to walk in minutes using massively parallel deep reinforcement learning,
N. Rudin, D. Hoeller, P . Reist, and M. Hutter, “Learning to walk in minutes using massively parallel deep reinforcement learning,” inin Proc. of the Conference on Robot Learning (CoRL),(2022), pp. 91– 100
2022
-
[7]
Champion-level drone racing using deep reinforcement learning,
E. Kaufmann, L. Bauersfeld, A. Loquercio,et al., “Champion-level drone racing using deep reinforcement learning,” Nature620, 982–987 (2023)
2023
-
[8]
Learning agile and dynamic motor skills for legged robots,
J. Hwangbo, J. Lee, A. Dosovitskiy,et al., “Learning agile and dynamic motor skills for legged robots,” Sci. Robotics4, eaau5872:1–13 (2019)
2019
-
[9]
Experience selection using dynamics similarity for efficient multi-source transfer learning between robots,
M. J. Sorocky, S. Zhou, and A. P . Schoellig, “Experience selection using dynamics similarity for efficient multi-source transfer learning between robots,” inProc. of the IEEE International Conference on Robotics and Automation (ICRA),(2020), pp. 2739–2745
2020
-
[10]
A review of differentiable simula- tors,
R. Newbury, J. Collins, K. He,et al., “A review of differentiable simula- tors,” IEEE Access12, 97581–97604 (2024)
2024
-
[11]
RotorS—a modular Gazebo MAV simulator framework,
F . Furrer, M. Burri, M. Achtelik, and R. Siegwart, “RotorS—a modular Gazebo MAV simulator framework,” inRobot Operating System (ROS): The Complete Reference,vol. 1 (Springer, 2016), pp. 595–625
2016
-
[12]
CrazyS: A software-in-the-loop platform for the crazyflie 2.0 nano-quadcopter,
G. Silano, E. Aucone, and L. Iannelli, “CrazyS: A software-in-the-loop platform for the crazyflie 2.0 nano-quadcopter,” inProc. of the Mediter- ranean Conference on Control and Automation (MED),(2018), pp. 352–357
2018
-
[13]
Gazebo simulation for Crazyflie CRTP,
F . Djeumou, G. Roussel, and J. Danielsson, “Gazebo simulation for Crazyflie CRTP,” https://github.com/wuwushrek/sim_cf (2018). Soft- ware repository, accessed December 2025
2018
-
[14]
Aerostack2: A software framework for developing multi-robot aerial systems,
M. Fernandez-Cortizas, M. Molina, P . Arias-Perez,et al., “Aerostack2: A software framework for developing multi-robot aerial systems,” arXiv preprint arXiv:2303.18237 (2023)
-
[15]
Crazyswarm: A large nano-quadcopter swarm,
J. A. Preiss, W. Honig, G. S. Sukhatme, and N. Ayanian, “Crazyswarm: A large nano-quadcopter swarm,” inProc. of the IEEE International Conference on Robotics and Automation (ICRA),(2017), pp. 3299– 3304
2017
-
[16]
CrazySim: A software-in-the-loop simulator for the Crazyflie nano quadrotor,
C. Llanes, Z. Kakish, K. Williams, and S. Coogan, “CrazySim: A software-in-the-loop simulator for the Crazyflie nano quadrotor,” in Proc. of the IEEE International Conference on Robotics and Automa- tion (ICRA),(2024), pp. 12248–12254
2024
-
[17]
CrazyChoir: Flying swarms of Crazyflie quadrotors in ROS 2,
L. Pichierri, A. Testa, and G. Notarstefano, “CrazyChoir: Flying swarms of Crazyflie quadrotors in ROS 2,” IEEE Robotics Autom. Lett. (2023)
2023
-
[18]
Aerial Gym Simulator: A framework for highly parallelized simulation of aerial robots,
M. Kulkarni, W. Rehberg, and K. Alexis, “Aerial Gym Simulator: A framework for highly parallelized simulation of aerial robots,” IEEE Robotics Autom. Lett. (RA-L)10, 4093–4100 (2025)
2025
-
[19]
Isaac Gym: High performance GPU-based physics simulation for robot learning,
V. Makoviychuk, L. Wawrzyniak, Y . Guo,et al., “Isaac Gym: High performance GPU-based physics simulation for robot learning,” in Proc. of the Conference on Neural Information Processing Systems (NeurIPS),(2021). Datasets and Benchmarks Track
2021
-
[20]
Parallel reinforcement learning simulation for visual quadrotor navigation,
J. Saunders, S. Saeedi, and W. Lil, “Parallel reinforcement learning simulation for visual quadrotor navigation,” inProc. of the IEEE Inter- national Conference on Robotics and Automation (ICRA),(2023), pp. 1357–1363
2023
-
[21]
AirSim: High-fidelity visual and physical simulation for autonomous vehicles,
S. Shah, D. Dey, C. Lovett, and A. Kapoor, “AirSim: High-fidelity visual and physical simulation for autonomous vehicles,” inField and Service Robotics,(Springer, 2017), pp. 621–635
2017
-
[22]
Learning to fly—a Gym environ- ment with PyBullet physics for reinforcement learning of multi-agent quadcopter control,
J. Panerati, H. Zheng, S. Zhou,et al., “Learning to fly—a Gym environ- ment with PyBullet physics for reinforcement learning of multi-agent quadcopter control,” inProc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS),(2021), pp. 7512–7519
2021
-
[23]
Pybullet, a python module for physics sim- ulation for games, robotics and machine learning,
E. Coumans and Y . Bai, “Pybullet, a python module for physics sim- ulation for games, robotics and machine learning,” http://pybullet.org (2016)
2016
-
[24]
Z. Huang, S. Batra, T. Chen,et al., “Quadswarm: A modular multi- quadrotor simulator for deep reinforcement learning with direct thrust control,” arXiv preprint arXiv:2306.09537 (2023)
-
[25]
Flightmare: A flexible quadrotor simulator,
Y . Song, S. Naji, E. Kaufmann,et al., “Flightmare: A flexible quadrotor simulator,” inProc. of the Conference on Robot Learning (CoRL), (2021), pp. 1147–1157
2021
-
[26]
Agilicious: Open-source and open-hardware agile quadrotor for vision-based flight,
P . Foehn, E. Kaufmann, A. Romero,et al., “Agilicious: Open-source and open-hardware agile quadrotor for vision-based flight,” Sci. Robotics7, 1–14 (2022)
2022
-
[27]
Accelerated policy learning with parallel differentiable simulation,
J. Xu, M. Macklin, V. Makoviychuk,et al., “Accelerated policy learning with parallel differentiable simulation,” inProc. of the International Conference on Learning Representations (ICLR),(2022)
2022
-
[28]
Flow matching ergodic cover- age,
M. M. Sun, A. Pinosky, and T. Murphey, “Flow matching ergodic cover- age,” inProc. of the Robotics: Science and Systems (RSS) Conference, (2025)
2025
-
[29]
Learning vision-based agile flight via differentiable physics,
Y . Zhang, Y . Hu, Y . Song,et al., “Learning vision-based agile flight via differentiable physics,” Nat. Mach. Intell.7, 954–966 (2025)
2025
-
[30]
PyTorch: an imperative style, high-performance deep learning library,
A. Paszke, S. Gross, F . Massa,et al., “PyTorch: an imperative style, high-performance deep learning library,” inProc. of the International Conference on Neural Information Processing Systems (NeurIPS), (2019)
2019
-
[31]
DiffAero: A GPU-accelerated differ- entiable simulation framework for efficient quadrotor policy learning,
X. Zhang, R. Wang, Y . Ren,et al., “DiffAero: A GPU-accelerated differ- entiable simulation framework for efficient quadrotor policy learning,” arXiv preprint (2025)
2025
-
[32]
Pytorch: An imperative style, high-performance deep learning library,
A. Paszke, S. Gross, F . Massa,et al., “Pytorch: An imperative style, high-performance deep learning library,” inAdvances in Neural Informa- tion Processing Systems 32: Annual Conference on Neural Information Processing Systems 2019, NeurIPS 2019, December 8-14, 2019, Van- couver, BC, Canada,H. M. Wallach, H. Larochelle, A. Beygelzimer, et al., eds. (2019...
2019
-
[33]
JAX: composable transfor- mations of Python+NumPy programs,
J. Bradbury, R. Frostig, P . Hawkins,et al., “JAX: composable transfor- mations of Python+NumPy programs,” (2018)
2018
-
[34]
Xla : Compiling machine learning for peak perfor- mance,
A. Sabne, “Xla : Compiling machine learning for peak perfor- mance,” https://research.google/pubs/xla-compiling-machine-learning- for-peak-performance (2020)
2020
-
[35]
JaxMARL: Multi-agent RL environments and algorithms in JAX,
A. Rutherford, B. Ellis, M. Gallici,et al., “JaxMARL: Multi-agent RL environments and algorithms in JAX,” inThe Thirty-eight Conference on Neural Information Processing Systems Datasets and Benchmarks T rack,(2024)
2024
-
[36]
Qdax: A library for quality- diversity and population-based algorithms with hardware acceleration,
F . Chalumeau, B. Lim, R. Boige,et al., “Qdax: A library for quality- diversity and population-based algorithms with hardware acceleration,” J. Mach. Learn. Res.25, 1–16 (2024)
2024
-
[37]
Volumetric ergodic control,
J. Kwon, M. M. Sun, and T. Murphey, “Volumetric ergodic control,” in Proc. of the IEEE International Conference on Robotics and Automation (ICRA),(2026)
2026
-
[38]
Equinox: neural networks in JAX via callable PyTrees and filtered transformations,
P . Kidger and C. Garcia, “Equinox: neural networks in JAX via callable PyTrees and filtered transformations,” inDifferentiable Programming Workshop at Advances in Neural Information Processing Systems, (2021)
2021
-
[39]
Mujoco xla (mjx),
G. D. M. Team, “Mujoco xla (mjx),” Official MuJoCo Documentation
-
[40]
Warp: A High-performance Python Framework for GPU Simulation and Graphics,
M. Macklin, “Warp: A High-performance Python Framework for GPU Simulation and Graphics,” (2022). NVIDIA GPU Technology Confer- ence (GTC)
2022
-
[41]
Newton: GPU-accelerated physics simula- tion for robotics and simulation research,
The Newton Contributors, “Newton: GPU-accelerated physics simula- tion for robotics and simulation research,” (2025)
2025
-
[42]
Casadi - a software frame- work for nonlinear optimization and optimal control,
J. A. E. Andersson, J. Gillis, G. Horn,et al., “Casadi - a software frame- work for nonlinear optimization and optimal control,” Math. Program. Comput.11, 1–36 (2019)
2019
-
[43]
SciPy 1.0: Fundamen- tal Algorithms for Scientific Computing in Python,
P . Virtanen, R. Gommers, T. E. Oliphant,et al., “SciPy 1.0: Fundamen- tal Algorithms for Scientific Computing in Python,” Nat. Methods17, 261–272 (2020)
2020
-
[44]
scipy.spatial.transform: Differentiable Framework-Agnostic 3D Transformations in Python,
M. Schuck, A. von Rohr, and A. P . Schoellig, “scipy.spatial.transform: Differentiable Framework-Agnostic 3D Transformations in Python,” in EurIPS,(2025), Workshop on Differentiable Systems and Scientific Machine Learning
2025
-
[45]
Crazyflie firmware,
Bitcraze, “Crazyflie firmware,” https://github.com/bitcraze/ crazyflie-firmware (2025). Software repository, accessed December 2025
2025
-
[46]
Learning quadrotor control from visual features using differentiable simulation,
J. Heeg, Y . Song, and D. Scaramuzza, “Learning quadrotor control from visual features using differentiable simulation,” in2025 IEEE International Conference on Robotics and Automation (ICRA),(2025), pp. 4033–4039
2025
-
[47]
Minimum snap trajectory generation and control for quadrotors,
D. Mellinger and V. Kumar, “Minimum snap trajectory generation and control for quadrotors,” in2011 IEEE International Conference on Robotics and Automation,(2011), pp. 2520–2525. Crazyflow 11
2011
-
[48]
Best of robot simulators - a ranked list of awesome projects,
McGuire, Kimberly, “Best of robot simulators - a ranked list of awesome projects,” GitHub (2026). Accessed on 06.05.2026
2026
-
[49]
PX4 Autopilot,
L. Meier and The PX4 Contributors, “PX4 Autopilot,”
-
[50]
Proximal Policy Optimization Algorithms
J. Schulman, F . Wolski, P . Dhariwal,et al., “Proximal policy optimization algorithms,” CoRRabs/1707.06347(2017)
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[51]
Backpropagation through time: what it does and how to do it,
P . Werbos, “Backpropagation through time: what it does and how to do it,” Proc. IEEE78, 1550–1560 (1990)
1990
-
[52]
acados – a modu- lar open-source framework for fast embedded optimal control,
R. Verschueren, G. Frison, D. Kouzoupis,et al., “acados – a modu- lar open-source framework for fast embedded optimal control,” Math. Program. Comput. (2021)
2021
-
[53]
Learning to fly in seconds,
J. Eschmann, D. Albani, and G. Loianno, “Learning to fly in seconds,” IEEE Robotics Autom. Lett.9, 6336–6343 (2024)
2024
-
[54]
Swar- mgpt: Combining large language models with safe motion planning for drone swarm choreography,
M. Schuck, D. O. Dahanaggamaarachchi, B. Sprenger,et al., “Swar- mgpt: Combining large language models with safe motion planning for drone swarm choreography,” IEEE Robotics Autom. Lett. (2025)
2025
-
[55]
A primer on SO(3) action representations in deep reinforcement learning,
M. Schuck, S. Samy, and A. P . Schoellig, “A primer on SO(3) action representations in deep reinforcement learning,” inThe Fourteenth International Conference on Learning Representations,(2026)
2026
-
[56]
S. Teetaert, W. Zhao, N. Xinyuan,et al., “A remote sim2real aerial competition: Fostering reproducibility and solutions’ diversity in robotics challenges,” arXiv preprint arXiv:2308.16743 (2023)
-
[57]
Advancing reproducibility, benchmarks, and education with remote sim2real: Remote simulation to real robot hardware,
S. Teetaert, W. Zhao, A. Loquercio,et al., “Advancing reproducibility, benchmarks, and education with remote sim2real: Remote simulation to real robot hardware,” IEEE Robotics & Autom. Mag.32, 117–123 (2025)
2025
-
[58]
lsy_drone_racing: Autonomous drone racing course @ LSY,
Learning Systems and Robotics Lab, “lsy_drone_racing: Autonomous drone racing course @ LSY,” https://github.com/utiasDSL/lsy_drone_ racing (2025)
2025
-
[59]
Control for Robotics: from optimal control to reinforcement learning,
A. P . Schoellig and S. Zhou, “Control for Robotics: from optimal control to reinforcement learning,” (2025)
2025
-
[60]
Bayesian optimiza- tion with safety constraints: safe and automatic parameter tuning in robotics,
F . Berkenkamp, A. Krause, and A. P . Schoellig, “Bayesian optimiza- tion with safety constraints: safe and automatic parameter tuning in robotics,” Mach. learning112, 3713–3747 (2023)
2023
-
[61]
Fast generation of collision- free trajectories for robot swarms using gpu acceleration,
M. Hamer, L. Widmer, and R. D’andrea, “Fast generation of collision- free trajectories for robot swarms using gpu acceleration,” IEEE Access 7, 6679–6690 (2019)
2019
-
[62]
A real-time game theoretic planner for autonomous two-player drone racing,
R. Spica, D. Falanga, E. Cristofalo,et al., “A real-time game theoretic planner for autonomous two-player drone racing,” inProceedings of Robotics: Science and Systems,(Pittsburgh, Pennsylvania, 2018)
2018
-
[63]
Nerf: Representing scenes as neural radiance fields for view synthesis,
B. Mildenhall, P . P . Srinivasan, M. Tancik,et al., “Nerf: Representing scenes as neural radiance fields for view synthesis,” inECCV ,(2020)
2020
-
[64]
3d gaussian splatting for real-time radiance field rendering,
B. Kerbl, G. Kopanas, T. Leimkühler, and G. Drettakis, “3d gaussian splatting for real-time radiance field rendering,” ACM Trans. on Graph. 42(2023)
2023
-
[65]
A common api for array and tensor python libraries,
C. for Python Data API Standards contributors, “A common api for array and tensor python libraries,” Python array API standard
-
[66]
RotorPy: A python-based multirotor simulator with aerodynamics for education and research,
S. Folk, J. Paulos, and V. Kumar, “RotorPy: A python-based multirotor simulator with aerodynamics for education and research,” (2023)
2023
-
[67]
How to model your crazyflie brushless,
A. Gräfe, C. Scherer, W. Hönig, and S. Trimpe, “How to model your crazyflie brushless,” inProc. of the IEEE International Conference on Robotics and Automation (ICRA),(2026)
2026
-
[68]
A comparative study of nonlinear mpc and differential-flatness-based control for quadrotor agile flight,
S. Sun, A. Romero, P . Foehn,et al., “A comparative study of nonlinear mpc and differential-flatness-based control for quadrotor agile flight,” IEEE Trans. on Robotics38, 3357–3373 (2022)
2022
-
[69]
Data-driven system iden- tification of quadrotors subject to motor delays,
J. Eschmann, D. Albani, and G. Loianno, “Data-driven system iden- tification of quadrotors subject to motor delays,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), (2024), pp. 8095–8102
2024
-
[70]
drone-models: Physics-based and data-driven quadrotor dynamics models for estimation, control, and simulation
Learning Systems and Robotics Lab, “drone-models: Physics-based and data-driven quadrotor dynamics models for estimation, control, and simulation.” https://github.com/utiasDSL/drone-models (2025)
2025
-
[71]
Addressing function ap- proximation error in actor-critic methods,
S. Fujimoto, H. van Hoof, and D. Meger, “Addressing function ap- proximation error in actor-critic methods,” inProceedings of the 35th International Conference on Machine Learning,vol. 80 ofProceed- ings of Machine Learning ResearchJ. Dy and A. Krause, eds. (PMLR, 2018), pp. 1587–1596
2018
-
[72]
Sample-efficient cross-entropy method for real-time planning,
C. Pinneri, S. Sawant, S. Blaes,et al., “Sample-efficient cross-entropy method for real-time planning,” inProceedings of the 2020 Conference on Robot Learning,vol. 155 ofProceedings of Machine Learning ResearchJ. Kober, F . Ramos, and C. Tomlin, eds. (PMLR, 2021), pp. 1049–1065
2020
-
[73]
Model predictive path integral control: From theory to parallel computation,
G. Williams, A. Aldrich, and E. A. Theodorou, “Model predictive path integral control: From theory to parallel computation,” J. Guid. Control. Dyn.40, 344–357 (2017). Crazyflow 12 MATERIALS AND METHODS Below, we give a detailed description of CRAZYFLOW’s archi- tecture and explain our design choices. We also show how this relates to the capabilities we ha...
2017
-
[74]
We therefore additionally provide an abstracted dynamics model that hides the inner control loop within stable dynam- ics, interfacing at the attitude level
or mid-level attitude interfaces for control-focused tasks [68]. We therefore additionally provide an abstracted dynamics model that hides the inner control loop within stable dynam- ics, interfacing at the attitude level. Based on the assumption Crazyflow 14 of a stable and well-tuned low-level control loop, the drone’s attitude, represented by Euler ang...
2048
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.