Virtual Elastic Tether: a New Approach for Multi-agent Navigation in Confined Aquatic Environments
Pith reviewed 2026-05-24 02:23 UTC · model grok-4.3
The pith
The Virtual Elastic Tether allows multi-agent underwater vehicle teams to recover formation after disturbances where standard visual servoing fails.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The Virtual Elastic Tether is introduced to handle incomplete state measurements in underwater multi-agent navigation by providing an elastic virtual link that stabilizes inter-robot distances, enabling the CAVES leader-follower system to navigate confined spaces successfully after discrete disturbances.
What carries the argument
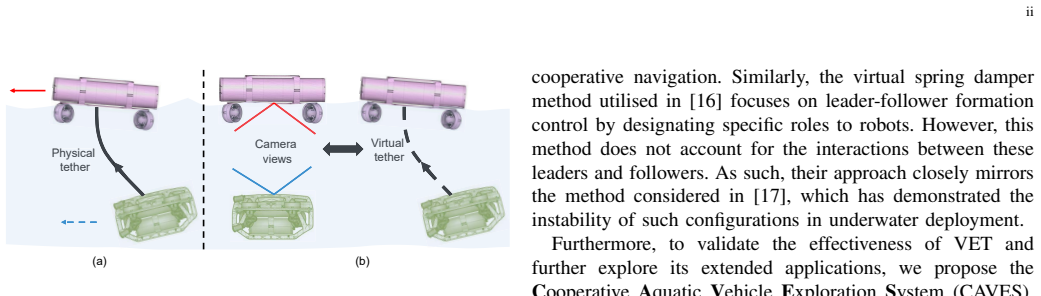
The Virtual Elastic Tether, a virtual elastic connection between leader and follower agents that uses vision-based measurements to regulate distances.
If this is right
- The VET-enhanced system recovers to pre-perturbation distances within 5 seconds.
- Baseline formation fails when induced distances exceed 0.6 m in simulation and 0.3 m in the real world.
- VET-enhanced CAVES successfully navigates a confined water pond where the baseline fails.
Where Pith is reading between the lines
- The approach may allow multi-agent teams to operate with less reliable communication in other partially observable environments.
- Further tests could check if the tether works under continuous rather than discrete disturbances.
Load-bearing premise
The available vision-based measurements suffice to implement and stabilize the Virtual Elastic Tether when facing discrete disturbances typical of confined aquatic conditions.
What would settle it
A trial in the real-world confined pond where the VET system fails to recover distances within 5 seconds after a disturbance that increases separation beyond 0.3 meters.
Figures








read the original abstract
Underwater navigation is a challenging area in the field of mobile robotics due to inherent constraints in self-localisation and communication in underwater environments. Some of these challenges can be mitigated by using collaborative multi-agent teams. However, when applied underwater, the robustness of traditional multi-agent collaborative control approaches is highly limited due to the unavailability of reliable measurements. In this paper, the concept of a Virtual Elastic Tether (VET) is introduced in the context of incomplete state measurements, which represents an innovative approach to underwater navigation in confined spaces. The concept of VET is formulated and validated using the Cooperative Aquatic Vehicle Exploration System (CAVES), which is a sim-to-real multi-agent aquatic robotic platform. Within this framework, a vision-based Autonomous Underwater Vehicle-Autonomous Surface Vehicle leader-follower formulation is developed. Experiments were conducted in both simulation and on a physical platform, benchmarked against a traditional Image-Based Visual Servoing approach. Results indicate that the formation of the baseline approach fails under discrete disturbances, when induced distances between the robots exceeds 0.6 m in simulation and 0.3 m in the real world. In contrast, the VET-enhanced system recovers to pre-perturbation distances within 5 seconds. Furthermore, results illustrate the successful navigation of VET-enhanced CAVES in a confined water pond where the baseline approach fails to perform adequately.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the concept of a Virtual Elastic Tether (VET) for multi-agent navigation in confined aquatic environments with incomplete state measurements. It develops a vision-based AUV-ASV leader-follower formulation within the CAVES platform and validates it through simulation and real-world experiments against an Image-Based Visual Servoing baseline. The key claims are that the baseline fails under discrete disturbances exceeding 0.6m in sim and 0.3m in real, while VET recovers within 5 seconds and enables successful navigation in a confined pond.
Significance. Should the VET approach prove effective with detailed validation, it would offer a novel solution to robustness issues in underwater multi-agent systems, potentially enabling more reliable collaborative exploration in challenging confined spaces where traditional servoing methods break down due to measurement limitations.
major comments (1)
- [Abstract] The central claims regarding specific recovery times (within 5 seconds) and performance thresholds (0.6 m simulation, 0.3 m real) for the baseline are presented without any accompanying formulation of the VET control law, description of the vision-based measurements, details of the experimental setup, disturbance characteristics, or statistical analysis. As the manuscript consists solely of the abstract, these load-bearing elements of the validation cannot be assessed.
Simulated Author's Rebuttal
We thank the referee for their review of our manuscript on the Virtual Elastic Tether approach. We respond point-by-point to the major comment below.
read point-by-point responses
-
Referee: [Abstract] The central claims regarding specific recovery times (within 5 seconds) and performance thresholds (0.6 m simulation, 0.3 m real) for the baseline are presented without any accompanying formulation of the VET control law, description of the vision-based measurements, details of the experimental setup, disturbance characteristics, or statistical analysis. As the manuscript consists solely of the abstract, these load-bearing elements of the validation cannot be assessed.
Authors: We acknowledge that the text provided consists solely of the abstract, which summarizes the key results from simulation and real-world experiments on the CAVES platform but does not include the requested technical details. The abstract is intended as a high-level overview, and the specific claims reflect outcomes from the underlying experiments; however, without the full manuscript sections, these elements cannot be elaborated here. revision: no
- Formulation of the VET control law
- Description of the vision-based measurements
- Details of the experimental setup
- Disturbance characteristics
- Statistical analysis
Circularity Check
No circularity; only abstract available with experimental claims vs baseline
full rationale
The document consists solely of an abstract containing no equations, derivations, parameters, or citations. Claims rest on experimental comparison of VET-enhanced CAVES against IBVS baseline under disturbances, with no self-referential steps, fitted inputs renamed as predictions, or load-bearing self-citations. No reduction of any result to its own inputs is possible or present.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Divers enter legacy pond at Sellafield,
Office for Nuclear Regulation, “Divers enter legacy pond at Sellafield,” 2023, [Online; accessed 8-July-2023]. [Online]. Available: https://news.onr.org.uk/2023/03/divers-enter-legacy-pond-at-sellafield/ xiv
work page 2023
-
[2]
Inside Sellafield: how the UK’s most dangerous nuclear site is cleaning up its act,
JAMES TEMPERTON, “Inside Sellafield: how the UK’s most dangerous nuclear site is cleaning up its act,” 2016, [Online; accessed 8-July-2023]. [Online]. Available: https://www.wired.co.uk/ article/inside-sellafield-nuclear-waste-decommissioning
work page 2016
-
[3]
Localisation of unmanned underwater vehicles (UUVs) in complex and confined environments: A review,
S. Watson, D. A. Duecker, and K. Groves, “Localisation of unmanned underwater vehicles (UUVs) in complex and confined environments: A review,”Sensors, vol. 20, no. 21, p. 6203, Oct. 2020
work page 2020
-
[4]
Autonomous underwater vehicle navigation: A review,
B. Zhang, D. Ji, S. Liu, X. Zhu, and W. Xu, “Autonomous underwater vehicle navigation: A review,” Ocean Engineering, vol. 273, p. 113861, apr 2023
work page 2023
-
[5]
R&d on robots for the decommissioning of fukushima daiichi nps,
K. Oikawa, “R&d on robots for the decommissioning of fukushima daiichi nps,” Int. Res. Inst. Nucl. Decommissioning, Tokyo, Japan, Tech. Rep, 2016
work page 2016
-
[6]
Swarm of micro flying robots in the wild,
X. Zhou, X. Wen, Z. Wang, Y . Gao, H. Li, Q. Wang, T. Yang, H. Lu, Y . Cao, C. Xu, and F. Gao, “Swarm of micro flying robots in the wild,” Science Robotics, vol. 7, no. 66, May 2022
work page 2022
-
[7]
Vega—a small, low cost, ground robot for nuclear decommissioning,
B. Bird, M. Nancekievill, A. West, J. Hayman, C. Ballard, W. Jones, S. Ross, T. Wild, T. Scott, and B. Lennox, “Vega—a small, low cost, ground robot for nuclear decommissioning,” Journal of Field Robotics , vol. 39, no. 3, pp. 232–245, nov 2021
work page 2021
-
[8]
Z. Jiang, F. Jovan, P. Moradi, T. Richardson, S. Bernardini, S. Watson, A. Weightman, and D. Hine, “A multirobot system for autonomous deployment and recovery of a blade crawler for operations and main- tenance of offshore wind turbine blades,” Journal of Field Robotics , vol. 40, no. 1, pp. 73–93, sep 2022
work page 2022
-
[9]
J. Gonz ´alez-Garc´ıa, A. G ´omez-Espinosa, E. Cuan-Urquizo, L. G. Garc´ıa-Valdovinos, T. Salgado-Jim ´enez, and J. A. E. Cabello, “Au- tonomous underwater vehicles: Localization, navigation, and commu- nication for collaborative missions,” Applied Sciences, vol. 10, no. 4, p. 1256, feb 2020
work page 2020
-
[10]
A journey toward modeling and resolving doppler in underwater acoustic communications,
F. Qu, Z. Wang, L. Yang, and Z. Wu, “A journey toward modeling and resolving doppler in underwater acoustic communications,” IEEE Communications Magazine, vol. 54, no. 2, pp. 49–55, Feb. 2016
work page 2016
-
[11]
Visual slam for autonomous ground vehicles,
H. Lategahn, A. Geiger, and B. Kitt, “Visual slam for autonomous ground vehicles,” in 2011 IEEE International Conference on Robotics and Automation. IEEE, May 2011
work page 2011
-
[12]
Micro AUV lo- calization for agile navigation with low-cost acoustic modems,
D. A. Duecker, F. Steinmetz, E. Kreuzer, and C. Renner, “Micro AUV lo- calization for agile navigation with low-cost acoustic modems,” in 2020 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV)(50043). IEEE, sep 2020
work page 2020
-
[13]
Characteristic analysis of underwater acoustic scattering echoes in the wavelet transform domain,
M. Yang, X. Li, Y . Yang, and X. Meng, “Characteristic analysis of underwater acoustic scattering echoes in the wavelet transform domain,” Journal of Marine Science and Application , vol. 16, no. 1, pp. 93–101, jan 2017
work page 2017
-
[14]
D. A. Duecker, N. Bauschmann, T. Hansen, E. Kreuzer, and R. Seifried, “Towards micro robot hydrobatics: Vision-based guidance, navigation, and control for agile underwater vehicles in confined environments,” in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, Oct 2020
work page 2020
-
[15]
Virtual tether search: A self-constraining search algorithm for swarms in an open ocean,
S. Tolba and R. Ammar, “Virtual tether search: A self-constraining search algorithm for swarms in an open ocean,” in 2017 IEEE Sym- posium on Computers and Communications (ISCC) . IEEE, jul 2017
work page 2017
-
[16]
Virtual spring damper method for nonholonomic robotic swarm self-organization and leader following,
J. Wiech, V . A. Eremeyev, and I. Giorgio, “Virtual spring damper method for nonholonomic robotic swarm self-organization and leader following,” Continuum Mechanics and Thermodynamics , vol. 30, no. 5, pp. 1091– 1102, apr 2018
work page 2018
-
[17]
K. Yao, N. Bauschmann, T. L. Alff, W. Cheah, D. A. Duecker, K. Groves, O. Marjanovic, and S. Watson, “Image-based visual ser- voing switchable leader-follower control of heterogeneous multi-agent underwater robot system,” in 2023 IEEE International Conference on Robotics and Automation (ICRA) , 2023, pp. 5200–5206
work page 2023
-
[18]
Image-based visual servoing of quadrotors to arbitrary flight targets,
G. Wang, J. Qin, Q. Liu, Q. Ma, and C. Zhang, “Image-based visual servoing of quadrotors to arbitrary flight targets,” IEEE Robotics and Automation Letters, vol. 8, no. 4, pp. 2022–2029, apr 2023
work page 2022
-
[19]
Adaptive image-based leader–follower formation control of mobile robots with visibility constraints,
J. Lin, Z. Miao, H. Zhong, W. Peng, Y . Wang, and R. Fierro, “Adaptive image-based leader–follower formation control of mobile robots with visibility constraints,” IEEE Transactions on Industrial Electronics , vol. 68, no. 7, pp. 6010–6019, Jul. 2021
work page 2021
-
[20]
Robust image-based visual servoing with prescribed performance under field of view constraints,
C. P. Bechlioulis, S. Heshmati-alamdari, G. C. Karras, and K. J. Kyriakopoulos, “Robust image-based visual servoing with prescribed performance under field of view constraints,” IEEE Transactions on Robotics, vol. 35, no. 4, pp. 1063–1070, aug 2019
work page 2019
-
[21]
A VEXIS—aqua vehicle explorer for in-situ sensing,
A. Griffiths, A. Dikarev, P. R. Green, B. Lennox, X. Poteau, and S. Watson, “A VEXIS—aqua vehicle explorer for in-situ sensing,” IEEE Robotics and Automation Letters , vol. 1, no. 1, pp. 282–287, jan 2016
work page 2016
-
[22]
A cyber- physical system for hydrobatic AUVs: System integration and field demonstration,
S. Bhat, I. Torroba, O. Ozkahraman, N. Bore, C. I. Sprague, Y . Xie, I. Stenius, J. Severholt, C. Ljung, J. Folkesson, and P. Ogren, “A cyber- physical system for hydrobatic AUVs: System integration and field demonstration,” in 2020 IEEE/OES Autonomous Underwater Vehicles Symposium (AUV)(50043). IEEE, sep 2020
work page 2020
-
[23]
Design and experiments with loco auv: A low cost open-source autonomous underwater vehicle,
C. Edge, S. Sakib Enan, M. Fulton, J. Hong, J. Mo, K. Barthelemy, H. Bashaw, B. Kallevig, C. Knutson, K. Orpen, and J. Sattar, “Design and experiments with loco auv: A low cost open-source autonomous underwater vehicle,” in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) . IEEE, Oct. 2020
work page 2020
-
[24]
Autonomous navigation for adaptive unmanned underwater vehicles using fiducial markers,
J. Chen, C. Sun, and A. Zhang, “Autonomous navigation for adaptive unmanned underwater vehicles using fiducial markers,” in 2021 IEEE International Conference on Robotics and Automation (ICRA) . IEEE, may 2021
work page 2021
-
[25]
Dead reckoning of dynamically positioned ships: Using an efficient recurrent neural network,
R. Skulstad, G. Li, T. I. Fossen, B. Vik, and H. Zhang, “Dead reckoning of dynamically positioned ships: Using an efficient recurrent neural network,” IEEE Robotics & Automation Magazine, vol. 26, no. 3, pp. 39–51, sep 2019
work page 2019
-
[26]
SVIn2: A multi-sensor fusion- based underwater SLAM system,
S. Rahman, A. Q. Li, and I. Rekleitis, “SVIn2: A multi-sensor fusion- based underwater SLAM system,” The International Journal of Robotics Research, p. 027836492211102, jul 2022
work page 2022
-
[27]
Navigation in the presence of obstacles for an agile autonomous underwater vehicle,
M. Xanthidis, N. Karapetyan, H. Damron, S. Rahman, J. Johnson, A. O'Connell, J. M. O'Kane, and I. Rekleitis, “Navigation in the presence of obstacles for an agile autonomous underwater vehicle,” in 2020 IEEE International Conference on Robotics and Automation (ICRA) . IEEE, May 2020
work page 2020
-
[28]
ResiPlan: Closing the planning-acting loop for safe underwater navigation,
M. Xanthidis, E. Kelasidi, and K. Alexis, “ResiPlan: Closing the planning-acting loop for safe underwater navigation,” in 2023 IEEE International Conference on Robotics and Automation (ICRA) . IEEE, may 2023
work page 2023
-
[29]
Model identification of a small omnidirectional aquatic surface vehicle: a practical implementation,
K. Groves, M. Dimitrov, H. Peel, O. Marjanovic, and B. Lennox, “Model identification of a small omnidirectional aquatic surface vehicle: a practical implementation,” in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2020, pp. 1813–1818
work page 2020
-
[30]
A decentralized cluster formation containment framework for multirobot systems,
J. Hu, P. Bhowmick, I. Jang, F. Arvin, and A. Lanzon, “A decentralized cluster formation containment framework for multirobot systems,” IEEE Transactions on Robotics , vol. 37, no. 6, pp. 1936–1955, dec 2021
work page 1936
-
[31]
E. Ferrante, A. E. Turgut, M. Dorigo, and C. Huepe, “Elasticity- based mechanism for the collective motion of self-propelled particles with springlike interactions: A model system for natural and artificial swarms,”Physical Review Letters, vol. 111, no. 26, p. 268302, dec 2013
work page 2013
-
[32]
Intermittent collective motion in sheep results from alternating the role of leader and follower,
L. G ´omez-Nava, R. Bon, and F. Peruani, “Intermittent collective motion in sheep results from alternating the role of leader and follower,” Nature Physics, vol. 18, no. 12, pp. 1494–1501, oct 2022
work page 2022
-
[33]
The reconfigurable aerial robotic chain: Modeling and control,
H. Nguyen, T. Dang, and K. Alexis, “The reconfigurable aerial robotic chain: Modeling and control,” in 2020 IEEE International Conference on Robotics and Automation (ICRA) . IEEE, may 2020
work page 2020
-
[34]
Inertial- measurement-based catenary shape estimation of underwater cables for tethered robots,
J. Drupt, C. Dune, A. I. Comport, S. Seillier, and V . Hugel, “Inertial- measurement-based catenary shape estimation of underwater cables for tethered robots,” in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) . IEEE, oct 2022
work page 2022
-
[35]
Catenary-based visual servoing for tether shape control between underwater vehicles,
M. Laranjeira, C. Dune, and V . Hugel, “Catenary-based visual servoing for tether shape control between underwater vehicles,” Ocean Engineer- ing, vol. 200, p. 107018, mar 2020
work page 2020
-
[36]
Trajectory optimization for target localization with bearing-only measurement,
S. He, H.-S. Shin, and A. Tsourdos, “Trajectory optimization for target localization with bearing-only measurement,” IEEE Transactions on Robotics, vol. 35, no. 3, pp. 653–668, jun 2019
work page 2019
-
[37]
Three-dimensional bearing-only target following via observability-enhanced helical guid- ance,
J. Li, Z. Ning, S. He, C.-H. Lee, and S. Zhao, “Three-dimensional bearing-only target following via observability-enhanced helical guid- ance,” IEEE Transactions on Robotics , vol. 39, no. 2, pp. 1509–1526, apr 2023
work page 2023
-
[38]
Formation control of nonholonomic mobile robots without position and velocity measurements,
X. Liang, H. Wang, Y .-H. Liu, W. Chen, and T. Liu, “Formation control of nonholonomic mobile robots without position and velocity measurements,” IEEE Transactions on Robotics, vol. 34, no. 2, pp. 434– 446, Apr. 2018
work page 2018
-
[39]
Joint ASV/AUV range-based formation control: Theory and experimental results,
J. M. Soares, A. P. Aguiar, A. M. Pascoal, and A. Martinoli, “Joint ASV/AUV range-based formation control: Theory and experimental results,” in 2013 IEEE International Conference on Robotics and Au- tomation. IEEE, may 2013
work page 2013
-
[40]
Implicit coordination for 3d underwater collective behaviors in a fish-inspired robot swarm,
F. Berlinger, M. Gauci, and R. Nagpal, “Implicit coordination for 3d underwater collective behaviors in a fish-inspired robot swarm,” Science Robotics, vol. 6, no. 50, jan 2021
work page 2021
-
[41]
Underwater acoustic localization for small submersibles,
N. Kottege and U. R. Zimmer, “Underwater acoustic localization for small submersibles,” Journal of Field Robotics , vol. 28, no. 1, pp. 40– 69, nov 2010
work page 2010
-
[42]
S. Krupinski, G. Allibert, M.-D. Hua, and T. Hamel, “An inertial- aided homography-based visual servo control approach for (almost) fully actuated autonomous underwater vehicles,” IEEE Transactions on Robotics, vol. 33, no. 5, pp. 1041–1060, Oct. 2017. xv
work page 2017
-
[43]
Image moments: A general and useful set of features for visual servoing,
F. Chaumette, “Image moments: A general and useful set of features for visual servoing,” IEEE Transactions on Robotics , vol. 20, no. 4, pp. 713–723, Aug. 2004
work page 2004
-
[44]
Vision-based leader–follower for- mation control of multiagents with visibility constraints,
X. Liu, S. S. Ge, and C.-H. Goh, “Vision-based leader–follower for- mation control of multiagents with visibility constraints,” IEEE Trans- actions on Control Systems Technology , vol. 27, no. 3, pp. 1326–1333, May 2019
work page 2019
-
[45]
Vision-based localization for leader–follower formation control,
G. L. Mariottini, F. Morbidi, D. Prattichizzo, N. Vander Valk, N. Michael, G. Pappas, and K. Daniilidis, “Vision-based localization for leader–follower formation control,” IEEE Transactions on Robotics , vol. 25, no. 6, pp. 1431–1438, 2009
work page 2009
-
[46]
Image dynamics-based visual servo control for unmanned aerial ma- nipulatorl with a virtual camera,
N. Lai, Y . Chen, J. Liang, B. He, H. Zhong, H. Zhang, and Y . Wang, “Image dynamics-based visual servo control for unmanned aerial ma- nipulatorl with a virtual camera,” IEEE/ASME Transactions on Mecha- tronics, vol. 27, no. 6, pp. 5264–5274, dec 2022
work page 2022
-
[47]
Image-based visual servoing of rotorcrafts to planar visual targets of arbitrary orientation,
J. Li, H. Xie, K. H. Low, J. Yong, and B. Li, “Image-based visual servoing of rotorcrafts to planar visual targets of arbitrary orientation,” IEEE Robotics and Automation Letters , vol. 6, no. 4, pp. 7861–7868, oct 2021
work page 2021
-
[48]
M. Dimitrov, K. Groves, D. Howard, and B. Lennox, “Model identifica- tion of a small fully-actuated aquatic surface vehicle using a long short- term memory neural network,” in 2021 IEEE International Conference on Robotics and Automation (ICRA) , 2021, pp. 5966–5972
work page 2021
-
[49]
K. Groves, A. West, K. Gornicki, S. Watson, J. Carrasco, and B. Lennox, “MallARD: An autonomous aquatic surface vehicle for inspection and monitoring of wet nuclear storage facilities,” Robotics, vol. 8, no. 2, p. 47, Jun. 2019
work page 2019
-
[50]
Nonlinear modelling of marine vehicles in 6 degrees of freedom,
T. I. Fossen and O.-E. Fjellstad, “Nonlinear modelling of marine vehicles in 6 degrees of freedom,” Mathematical Modelling of Systems , vol. 1, no. 1, pp. 17–27, jan 1995
work page 1995
-
[51]
AprilTag 2: Efficient and robust fiducial detection,
J. Wang and E. Olson, “AprilTag 2: Efficient and robust fiducial detection,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) . IEEE, oct 2016, pp. 4193–4198
work page 2016
-
[52]
PX4: A node-based mul- tithreaded open source robotics framework for deeply embedded plat- forms,
L. Meier, D. Honegger, and M. Pollefeys, “PX4: A node-based mul- tithreaded open source robotics framework for deeply embedded plat- forms,” in 2015 IEEE International Conference on Robotics and Au- tomation (ICRA). IEEE, may 2015
work page 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.